双目立体视觉在机器人三维重建定位中的方法研究
2013-09-14曹凯
曹 凯
(西安工业大学 电信学院,陕西西安 710021)
双目立体视觉在机器人三维重建定位中的方法研究
曹 凯
(西安工业大学 电信学院,陕西西安 710021)
本文对双目立体视觉在机器人三维重建定位中的方法研究,并提出了相应的解决方案。
立体视觉;立体匹配;三维重建
0 前言
信息技术的发展,让人类数字化的进程在不断加快,同时对于信息的精度要求越来越高。过去单一的信息处理方式已经不能满足人们的需要,人们希望能够以更加先进的信息处理方式,不断的去进行方式方法的创新,以实现多维信息处理的智能计算机系统。这也是科学家们一起努力的方向,以期通过技术的进步以提升多维信息处理能力。信息专家们把实现多维信息的重要环节放在计算机视觉上。对于人类而言,由于信息的获取方式主要是通过视觉这种方式来实现的,主要有百分之七十到百分之八十的信息来自于视觉。当前人们对于视觉系统知道的还比较少,因此,还没有科学的原理来对视觉的识别的进行理性客观的描述。对于计算机视觉的处理,要与多种学科建立密切的联系,包括神经生理学、心理物理学等,这对计算机视觉的发展有重要的促进作用。对于数字图像的处理与计算机视觉有着非常紧密的关系,这也是双目立体视觉在机器人三维重建定位中的重要的方法依据,是正确的处理信息中的重要部分和关键技术。
1 研究意义
在对机器人技术进行研究中,被广泛研究与应用的技术即是立体视觉技术。双目立体视觉技术通过对同一个目标的两幅图片进行相应的提取、识别,并进行匹配与解释操作,来实现重新建立起三维信息环境的目的。其过程包括如摄像机标定、立体匹配及三维图像的重建等。通过展开对双目立体视觉技术的深入与广泛的研究与探讨,让人们对于多目视觉有非常重要的启发的作用。在工业装配、家用、公共服务用机器人的研究中,重点的问题所在即是需要解决视觉的定位问题,多目视觉非常好的解决了这一技术问题。本文研究了计算机立体视觉定位问题,以期建立起非常完善的机器人双目立体视觉系统结构。
2 双目立体视觉在机器人三维重定位中的方法研究
对于立体视觉的研究有了较大的进展,但对于实际应用的推广方面还有很多需要改进的地方,仍不够成熟。一方面是由于技术方面的原因,另一方面还是由于人类对于视觉机理的研究还不到位。因此对于人类视觉系统的研究一直在不断的进行。目前主要包括的内容有:
2.1 摄像机标定
在立体视觉的研究中,摄像机标定是立体视觉研究的重要组成部分。由于在应用中的目标不同,对于摄像机标定技术也提出了非常多的要求。如果系统任务是相对于参考坐标系来的,那么保持一定的定位精度是非常重要的。根据不同的系统任务来做有效的匹配和识别。对有效的标定摄像机内外参数有非常有效的作用。
2.2 机器人立体视觉
机器人立体视觉是指机器人通过综合的分析从不同的视觉点得到多幅图像,并通过分析成像后形成三维的景物。在信息处理中,我们了解到在机器视觉系统中要,要解决的二个问题是其一是立体匹配的问题,一是三维重建的问题。
机器人双目立体视觉系统的研究的重点问题即是立体匹配的问题。这是最重要也是最有难度的一个问题,由于立体场景中有受影响的因素诸多,如会受到光照条件的影响等。在研究中,由于研究对象的形状的不同,物理特性的不同都会影响成像的形成。在技术的研究中要注重在各种复杂场景中的算法应用,提高匹配的能力 与抗干扰的能力,以降低实现的复杂程度和计算量,提高计算的精度。
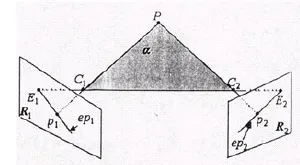
图1 极线相关原理
在应用中,匹配准则作为一种规则,来实用来实现现实物理世界的固有属性与所选匹配基元匹配过程中的规则。通过匹配原则的应用来有效的提高系统的计算效率,提高系统去除歧义的能力。在匹配性原则中,其中最为一般,最为基本的物理约束即是相容性约束和连续性约束原则。在基本约束的前期下,提出了对于景物处理的应用方面的要求及特点,以通过附加的一些先验的知识来引申出一些特定的需要匹配控制的原则。
在匹配准则中的对于外极线约束的描述是在像平面(1R)上选定一点(1P),它在另一像平面(2R)上的对应点(2P)只有可能处于与之对应的极线(2EP)上。根据极线相关原理,最大程度的降低匹配的困难度并有效的提高计算的速度。
三维重建的最先决的条件即是要有效的建立起两幅图像的图元中的相互的对应关系,要进行立体匹配。对于实际的立体图像对,求解其对应问题极具挑战性,可以说是立体视觉中最困难的一步。
2.3 双目立体视觉
对于双目立体视觉系统是利用机器人的关于距离的感知的技术,对人类的视觉系统进行有效的模拟。以实现灵活立体的测量景物的作用。这对于视觉生理及工程应用都有非常重要的意义。
2.4 摄像机定标
在应用中,通过对摄像机的定标来实现在实际应用中,摄像机的具体定位位置、摄像机的属性的系列的参数以及建立成像模型的形状,来确定在实际的空间坐标系中,物体点同它在图像平面上像点之间的对应关系。在应用中,平等的双视觉模型是理想的应用模型,有效的实现了极线与图像扫描线的重合,进一步降低了立体匹配的复杂性。通过一般的旋转和位移成像系统可以得到理想的模型。通过摄像机的定标方法可以得到详尽的摄像机位置定位,通过调节光轴的方向及对焦距进行调整来实现对参数的调整,采用摄像机自定标方法确定三维空间点映射为二维图像点的变换矩阵。
3 结语
在对机器人视觉系统进行研究中,最为关键的一个环节即是要对双目立体成像模型进行系统的分析,并进行重点的研究。分析研究单目成像模型的基础上,进一步分析研究平行的双目成像模型的组成部分。在对立体成像模型进行研究与视差匹配后,再恢复三维的距离就会相对比较容易。对于距离测量精度有多种影响因素,包括数字量化效应、对各种特征的检测与定位匹配的精度等各种因素。因此,要用正确方法来对距离的测量精度和定位精度进行精确的测试 。并采用适宜的方法,来设计较为合适宜的双目立体视觉系统。在对双目立体视觉系统进行设计时,要充分考虑各方面的各种因素,以确何在各个环节都有较高的精度。立体视觉是与心理、生理及物理、计算机等学科都有一定联系的交叉学科,对于立体视觉系统的研究有着非常重要的理论意义与实用的意义,因此,进一步对人类视觉系统进行深入的研究,利用双目立体视觉系统对机器人进行有效三维重建定位,有重要的意义。
[1] 雷成,吴福朝,胡占义,一种新的基于主动视觉系统的摄像机自定标方法.计算机学报,2000,23(上1)
[2] 杨长江,江威,胡占义,一种基于主动视觉的摄像机内参数自定标方法.计算机学报,1998,21(5)
Research methods in robot positioning of 3-D reconstruction of binocular stereo vision
Cao Kai
(Telecommunication College of Xi’an Technological University Shanxi Xi’an 710021)
This paper studies on the method of binocular stereo vision in robot positioning of 3-D reconstruction, and proposed the corresponding solution
Stereo vision; stereo matching; 3D reconstruction