基于重构控制分配的4WID/4WIS电动车容错控制*
2013-08-19刘杰刘超宗长富郑宏宇刘明辉
刘杰 刘超 宗长富† 郑宏宇 刘明辉
(1.吉林大学 汽车仿真与控制国家重点实验室,吉林 长春 130022;2.中国第一汽车集团公司 技术中心,吉林 长春 130011)
随着汽车排放要求的日益严格,越来越多的公司和研究机构对电动车进行了产品开发和学术研究.而应用线控技术的四轮独立驱动/四轮独立转向(4WID/4WIS)的电动车有望成为新一代具有前景的电动车构型[1].4WID/4WIS 电动车具有较多的控制自由度,是实施多种汽车先进控制技术的良好平台[2-3].其属于过驱动控制系统,系统中存在冗余执行器,如果一个或多个执行器故障后,可以重构剩余正常的执行器,仍然保持期望的控制目标[4-5].
国内外学者对4WID 电动车的容错控制问题进行了探究,从容错控制算法结构角度,可以分为整体式控制架构和基于控制分配的分层控制架构[6-10];从控制律重构角度,可以分为在线重构控制律和离线重构控制律[6-7,11].而对4WID/4WIS 电动车的容错控制问题还鲜见深入的研究.文中以提高车辆故障后的稳定性为目标,针对多种驱动电机故障进行了探讨,设计了基于模型预测控制理论和重构控制分配的主动容错控制算法,在仿真实验中对该容错控算法进行了验证.
1 容错控制结构
文中提出的容错控制算法结构如图1 所示.容错控制器由运动控制器、重构控制分配器和故障检测与诊断模块三部分组成.故障检测与诊断模块监测车辆的行驶状态,一旦发现故障决策出故障类型,并将故障信息反馈给重构控制分配器.运动控制器根据驾驶员的驾驶操纵和车辆状态得到车辆期望的动力学响应,基于模型预测控制理论优化车辆的动力学响应,计算出需要的总的力和力矩.重构控制分配器在驱动电机无故障时,采用名义控制分配律,以最大化轮胎附着裕度为控制目标,将总的力和力矩分配到每个车轮上;在诊断出某类驱动电机故障情况后,采用相应的重构控制分配律,控制目标既考虑到最大化故障后的稳定裕度又兼顾实际的故障状况.容错控制的任务为:既对故障驱动电机进行故障限制,防止故障的进一步扩大;又在正常驱动电机中完成控制律重构的工作,确保车辆故障后仍能保持期望的动力学特性.假设控制所需的车辆状态已知,状态估计方法可参考文献[12].

图1 主动容错控制结构图Fig.1 Active fault-tolerant control structure
2 容错控制器设计
2.1 运动控制器
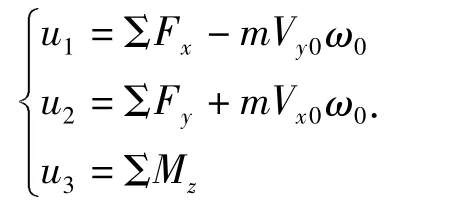
运动控制器中的参考模型综合驾驶员的驾驶操纵和车辆状态得到车辆期望的动力学响应[13-14],即期望的纵向车速Vxd、侧向车速Vyd和横摆角速度ωd.运动控制器基于模型预测控制理论优化车辆的动力学响应,控制纵向车速Vx、侧向车速Vy和横摆角速度ω 跟踪目标期望值,计算出需要的总的力和力矩,即总的纵向力ΣFx、总的侧向力ΣFy和横摆力矩ΣMz.
2.1.1 控制模型及其线性化
文中采用车辆平面运动三自由度模型,考虑纵向、侧向和横摆运动三个自由度,忽略了车辆的垂向运动、俯仰和侧倾运动.应用多元函数泰勒展开舍去二阶及高阶微分项,实现控制模型的线性化,令
式中:Vx0、Vy0、ω0分别是当前时刻估计或测量得到的车辆纵向速度、侧向速度和横摆角速度.
得到控制模型的状态空间形式:

式中:Ac、Bc、Cc为状态空间矩阵;xc为3 维状态向量;u=(u1,u2,u3)T,为3 维控制向量;y 为3 维输出向量.


式中:m 为整车质量,Iz为绕车辆坐标系z 轴转动惯量.
2.1.2 稳定性分析和镇定反馈
通过求取系统特征值,分析被控系统稳定性.令特征多项式等于0,得到

求得系统特征值为 1 =0,2=ω0i,3=-ω0i.3 个特征值的实部均为0,系统为临界稳定.模型预测控制算法适用于渐进稳定的线性对象[15],可以设计状态反馈配置极点镇定被控系统.由能控性判别准则可知系统是状态完全能控的,上述系统可以任意配置极点.设定加入反馈控制器后的闭环极点为[-10,-9,-8],在Matlab 软件中利用Place 函数,按照Vx=20 m/s,Vy=4 m/s,ω =0.1 rad/s 状态下的系统方程计算得到反馈矩阵P:
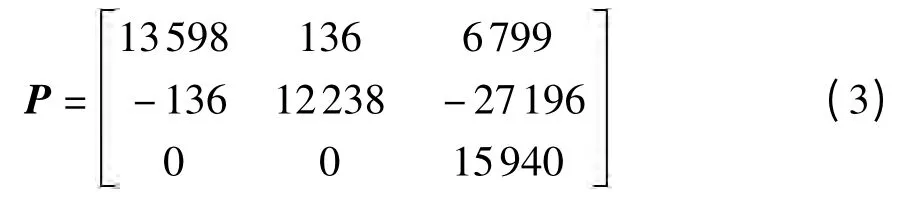
把u=v-Pxc代入状态空间表达式(1)中,得到镇定后的闭环系统的状态空间模型:

式中,v 为3 维控制输入向量,以式(4)作为被控系统,设计模型预测控制器.
2.1.3 基于模型预测控制的运动控制算法
运动控制器采用模型预测控制理论设计,模型预测控制适用于离散时间系统,对式(4)进行离散化.得到离散化后的增量状态空间模型:

式中:Δxq(k)=xq(k)-xq(k-1),Δu(k)=u(k)-u(k-1);xq(k)、u(k)分别为k 时刻的状态向量和控制向量;Aq、Bq、Cq分别为Ac、Bc、Cc的离散矩阵.
改写式(5)得到新的状态空间表达式(6):

定义ki时刻对ki+h 时刻的预测状态为x(ki+h|ki),符号“|”后的ki表示当前时刻ki.设预测时域为Np,控制时域为Nc.
定义新的向量:

对于控制系统未来Np个采样时刻的预测可以根据如下方程计算:

式中,

设输出响应的目标值为

定义模型预测控制的优化目标函数为

式中,W1、W2为权重对角矩阵.利用式(10)最小化目标函数J 获得最优控制输入序列ΔU.

2.2 重构控制分配器
重构控制分配器基于重构控制分配方法,将运动控制器计算的总的力和力矩分配到各个轮胎上,根据驱动电机的故障情况,分别采用相应的控制分配律.根据该控制分配律决策出每个轮的轮胎纵向力Fx和轮胎侧向力Fy.在无故障情况下,重构控制分配器采用名义控制分配律;在某种故障情况下,重构控制分配器采用与该故障模式对应的重构控制分配律.
2.2.1 名义控制分配算法
无故障情况下采用名义控制分配律,以提高车辆稳定性为目标,旨在最大化轮胎附着裕度[16],目标函数采用如下的表达式:

式中,下标fl、fr、rl、rr 分别表示前左轮、前右轮、后左轮和后右轮,c1、c2、c3、c4为权重系数,μ 为轮胎与路面之间的附着系数.将运动控制器求解得到的总的力和力矩ΣFx、ΣFy、ΣMz分配到每个车轮上的轮胎力Fx、Fy需要满足以下3 个运动学等式约束:

式中,d 为轮距,a、b 分别为质心至前、后轴的距离.将轮胎力的控制分配问题归纳为满足3 个等式约束的最优化问题,通过最小化目标函数f 获得求解得到各车轮上的轮胎纵向力Fx和轮胎侧向力Fy.
2.2.2 重构控制分配算法
文中提出了系统层级的整车容错控制策略,即侧重于诊断某一驱动系统的驱动力是否能正常输出,而不对具体的故障加以区别,通过在整车控制层协调控制多个驱动系统以保障故障后车辆期望运动轨迹.同时执行器层的容错策略对执行器发生的故障进行限制,防止故障的进一步扩散,这部分文中暂不进行深入研究.针对车辆多种故障工况,离线设计重构控制分配策略,在车辆行驶中根据故障模式切换相应的重构控制分配律.文中提出的非迭代重构控制分配方法不需要在线实时设计,没有控制律重构在线计算导致的故障时间延时,有利于快速解决车辆故障后不稳定运动问题.
文中提出的重构控制分配方法如下:
(1)在车辆正常行驶的情况下,根据名义控制分配律计算出各个执行器的名义控制输入un;
(2)根据故障信息,判断出失效模式;
(3)根据相应的失效模式,采用相应的重构控制分配律,此时的执行器控制输入u 为重构执行器控制输入ur.
重构控制分配流程如图2 所示.

图2 重构控制分配方法流程图Fig.2 Flowchart of reconfigurable control allocation
重构控制分配策略采用表1 中的方法,分别针对单轮、两轮和三轮故障设计了相应的重构分配方法.在单轮和两轮故障的情况中,考虑在驱动电机故障约束情况下优化目标函数式(11),提高故障情况下的附着裕度;在三轮故障的情况中,对3 个故障轮纵向力和侧向力约束后,仅剩余2 个可控的轮胎力,此时考虑满足动力学约束式(13)、(14),着重保持故障后车辆的侧向和横摆动力学特性.表1 中,Fyfr0、Fyrl0、Fyrr0为采用名义控制分配律计算得到的初值.

表1 重构控制分配策略Table 1 Reconfigurable control allocation strategy
3 仿真实验
仿真实验采用Matlab/Simulink 中建立的11 自由度非线性车辆模型,其具有车身平动3 个自由度,车轮转动和旋转8 个自由度,采用瞬态Magic Formula 轮胎公式.基于动力学方程和电磁方程建立了驱动电机模型:
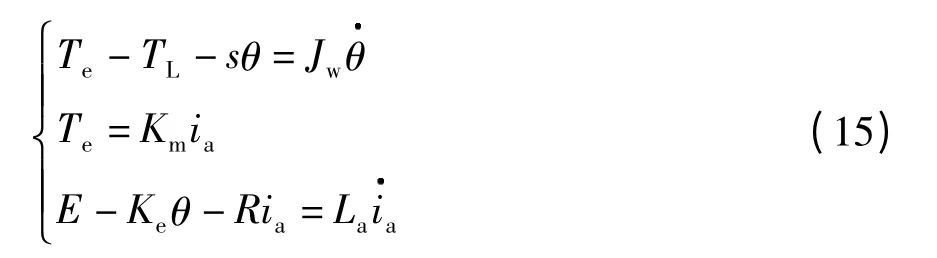
式中,Te为电磁转矩,TL为负载转矩,s 为摩擦系数,θ为车轮转速,Jw为电机轴和车轮的转动惯量,Km为电机转矩系数,Ke为电动机反电动势系数,ia为电机电流,R 为电机电枢电阻,La为电机电枢电感,E 为输入端电压.驱动电机采用PI 控制,即:

式中,Ted为电机输出力矩的控制目标值,Te为电机实际输出值,KP、KI分别为比例系数和积分系数,t 为时间.同样以类似的方法建立了转向电机模型,通过电流环、转速环、位置环3 个闭环实现转向电机的精确位置控制.电动车模型参数见参考文献[14].驱动电机和转向电机仿真实验的参数见表2.
针对车辆故障工况,将所提出的容错控制器与文献[14]的集成控制器进行对比,以验证容错控制算法的有效性.仿真工况设置为:车辆以80 km/h 的车速行驶在路面附着系数为0.8 的地面上,在10 s时前轮转角阶跃输入1°.分别注入了3 种不同的故障:在5 s 时前左轮驱动电机失效,而后在15 s 时前右轮驱动电机失效,最后在25 s 时后左轮驱动电机失效.容错控制器分别在故障发生0.1 s 后检测到故障并采用相应的重构控制分配律.车辆的侧向速度和横摆角速度如图3、4 所示.
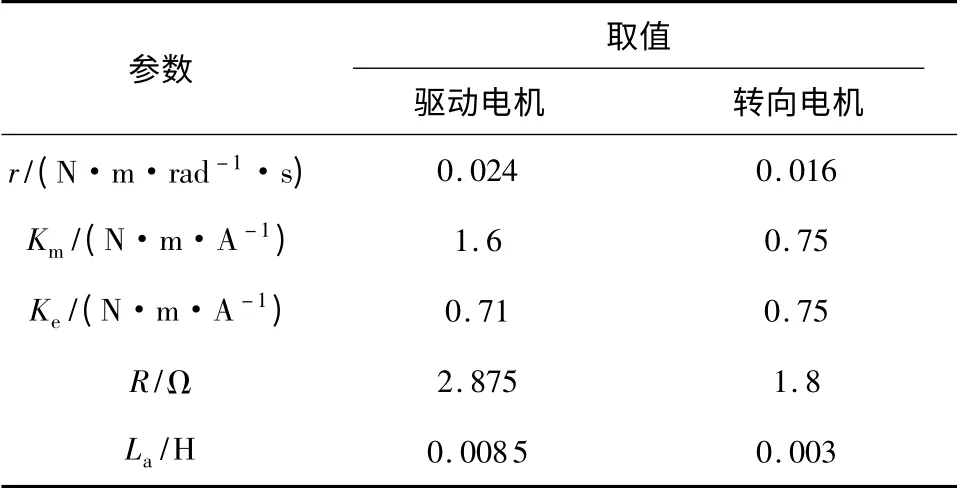
表2 电机仿真参数Table 2 Motor parameters in simulation
由图3、4 可知,基于重构控制分配的容错控制方法在多种故障发生时仍能够满足车辆期望的动力学响应,相对于没有容错控制策略的集成控制器,容错控制器在故障发生后侧向速度v 和横摆角速度ω变化的幅值和持续时间均较小,有利于快速恢复到车辆期望的动力学响应,从而保证了车辆的安全性、稳定性和操纵性.

图3 不同方法的侧向速度控制效果对比Fig.3 Comparison of control effects of lateral velocities obtained by using different control methods

图4 不同方法的横摆角速度控制效果对比Fig.4 Comparison of control effects of yaw rates obtained by using different control methods
图5、6 示出了容错控制器和集成控制器的纵向力和侧向力的分配情况.图5 表明了容错控制器在切换重构控制律后,更主动并迅速地调节了纵向力的分配,同时对故障执行器的纵向力进行了限制;而集成控制器没有检测到执行器故障,仍然按原有策略进行分配,其没有限制故障的执行器,反而增加了故障执行器的控制输入,这很可能会导致执行器故障的进一步扩大,容易发生危险的状况.图6 表明了容错控制器和集成控制器的侧向力分配差别并不大.图7 中,φyfl、φfr、φrl、φrr分别为前左轮、前后轮、后左轮和后右轮的车轮转角.图7 示出了容错控制器和集成控制器车轮转角的分配情况,在故障情况下,容错控制器的车轮转角变动更小,利于车辆恢复到期望运动.
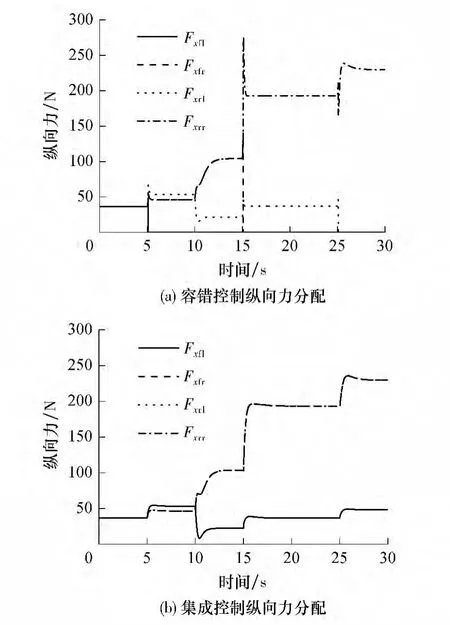
图5 纵向力分配Fig.5 Longitudinal force distribution

图6 侧向力分配Fig.6 Lateral force distribution
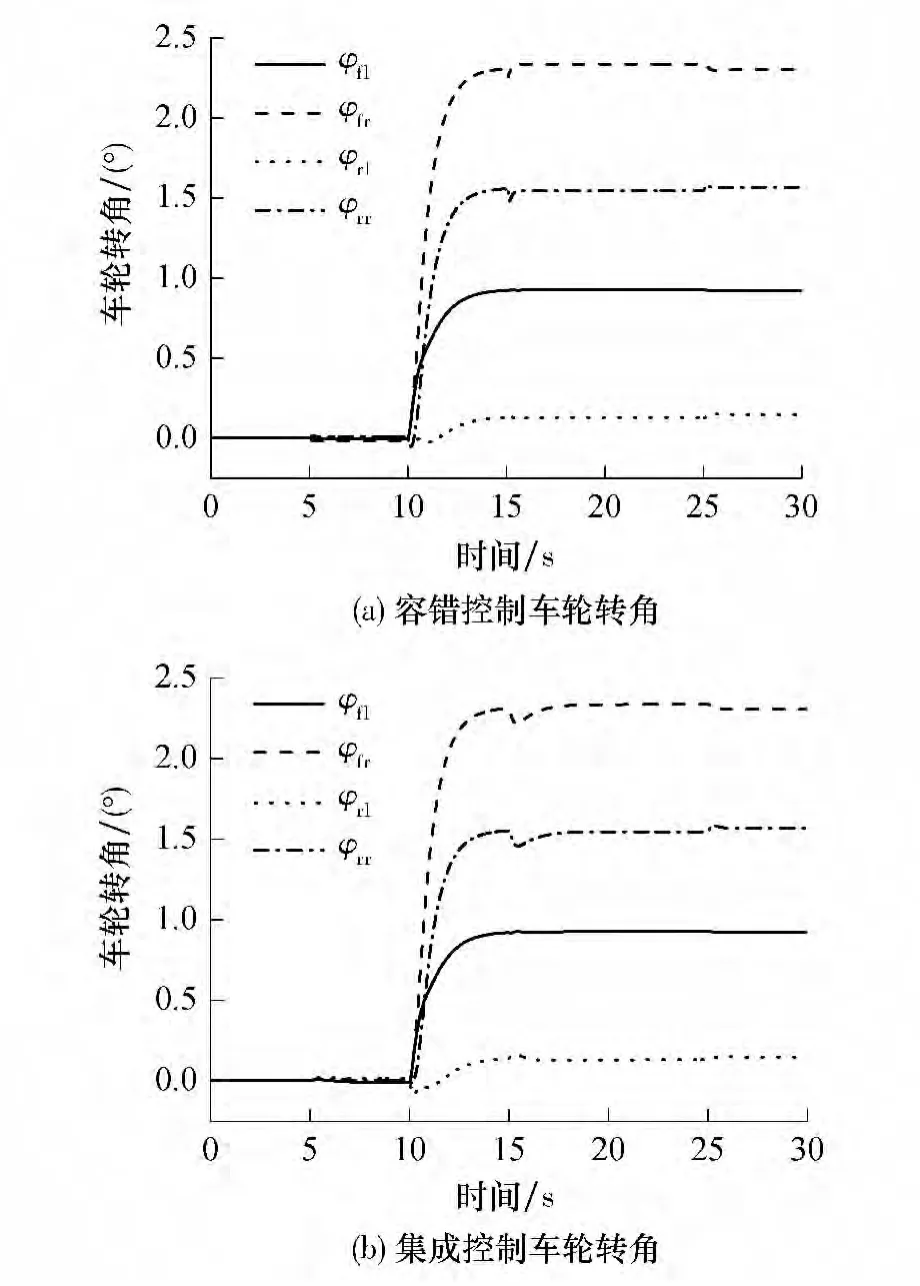
图7 车轮转角Fig.7 Wheel angle
4 结论
(1)针对线控4WID/4WIS 电动车,基于模型预测控制理论和重构控制分配方法对多种驱动电机故障的容错控制问题进行了研究,所提出的容错控制方法能有效保证故障后车辆的安全性、稳定性和操纵性.
(2)基于重构控制分配方法,将整车控制器的设计工作分为基于模型预测控制理论的运动控制器和基于重构控制分配的控制分配器,简化了设计工作.同时对于容错控制问题,只需改变控制分配器的控制分配律,而不需变动运动控制器,整车控制器既适用于正常工况,又适用于驱动电机故障工况.
(3)离线设计控制分配器故障情况下的控制分配律,省去了在线控制分配律的计算时间,防止了车辆故障状况的进一步恶化,为容错控制节省了宝贵的时间.
[1]Wang Rongrong,Wang Junmin.Fault-tolerant control forelectric ground vehicles with independently-actuated inwheel motors[J].Journal of Dynamic Systems,Measurement,and Control,2012,134(2):021014/1-10.
[2]李刚,宗长富,陈国迎,等.线控转向四轮独立驱动电动车的AFS/DYC 集成控制[J].华南理工大学学报:自然科学版,2012,40(3):150-155.Li Gang,Zong Chang-fu,Chen Guo-ying,et al.Integrated AFS/DYC control of steering-by-wire 4WID electric vehicle[J].Journal of South China University of Technology:Natural Science Edition,2012,40(3):150-155.
[3]Liu J,Zong C,Ma Y.4WID/4WIS electric vehicle modeling and simulation of special conditions[C]∥Proceedings of SAE 2011 Commercial Vehicle Engineering Congress.Rosemont:SAE International,2011.
[4]Max Demenkov.Reconfigurable direct control allocation for overactuated systems [C]∥Proceedings of the 18th IFAC World Congress.Milano:Università Cattolica del Sacro Cuore,2011.
[5]Zhang Y M.Jiang J.Active fault-tolerant control system against partial actuator failures [J].IEE Proceedings-Control Theory and Applications,2002,149(1):95-104.
[6]Yang Hao,Cocquempot Vincent,Jiang Bin.Optimal faulttolerant path-tracking control for 4WS4WD electric vehicles[J].IEEE Transactions on Intelligent Transportation Systems,2010,11(1):237-243.
[7]Li D Y,Song Y D,Huang D,et al.Model-independent adaptive fault-tolerant output tracking control of 4WS4WD road vehicles [J].IEEE Transactions on Intelligent Transportation Systems,2013,14(1):169-179.
[8]Song Y D,Chen H N,Li D Y.Virtual-point-based faulttolerant lateral and longitudinal control of 4W-steering vehicles[J].IEEE Transactions on Intelligent Transportation Systems,2011,12(4):1343-1351.
[9]Wang Rongrong,Wang Junmin.Fault-tolerant control with active fault diagnosis for four-wheel independently driven electric ground vehicles[J].IEEE Transactions on Vehicular Technology,2011,60(9):4276-4287.
[10]Dumont P E,Aitouche A,Merzouki R,et al.Fault tolerant control on an electric vehicle [C]∥IEEE ICIT 2006.Mumbai:Renaissance Mumbai Hotel and Convention Centre,2006.
[11]褚文博,罗禹贡,韩云武,等.基于规则的分布式电驱动车辆驱动系统失效控制[J].机械工程学报,2012,48(10):90-95,102.Chu Wen-bo,Luo Yu-gong,Han Yun-wu,et al.Rulebased traction system failure control of distributed electric drive vehicle[J].Journal of Mechanical Engineering,2012,48(10):90-95,102.
[12]宗长富,胡丹,杨肖,等.基于扩展Kalman 滤波的汽车行驶状态估计[J].吉林大学学报:工学版,2009,39(1):7-11.Zong Chang-fu,Hu Dan,Yang Xiao,et al.Vehicle driving state estimation based on extended Kalman filter[J].Journal of Jilin University:Engineering and Technology Edition,2009,39(1):7-11.
[13]陈国迎.四轮独立线控电动汽车试验平台搭建与集成控制策略研究[D].长春:吉林大学汽车工程学院,2012:63-65.
[14]刘经文.四轮独立电动车驱动/转向/制动稳定性集成控制算法研究[D].长春:吉林大学汽车工程学院,2012:61-63.
[15]席裕庚.预测控制[M].北京:国防工业出版社,1993:5-9.
[16]Mokhiamar Ossama,Abe Masato.How the four wheels should share forces in an optimum cooperative chassis control[J].Control Engineering Practice,2006,14(3):295-304.
