基于模型预测控制的汽车换道操纵逆问题求解*
2013-08-19刘英杰赵又群
刘英杰 赵又群
(南京航空航天大学 能源与动力学院,江苏 南京 210016)
交通事故发生率居高不下,早已引起汽车行业的广泛关注.因此,人们将主动安全系统作为一项措施,用来减少交通意外的发生率.其中广泛应用的是基于制动的障碍物避让辅助系统.目前,人们又致力于研究通过制动和转向换道相结合进行障碍物自动避让技术的研究[1-2].
汽车操纵逆动力学以指定的操纵性能来评价驾驶员对汽车施加的操纵输入,可以以最有效的方式来控制不同汽车的操纵性能[3-5].
模型预测控制(MPC)是一种基于预测模型进行控制的算法,这种预测模型能够代表被控对象的主要控制性能参数,它可以根据被控对象的过程信息判断被控对象的未来输入输出.理论和计算系统的并行优势拓展了实时模型预测控制的应用范围[6-7].
模型预测控制能够很好地处理控制量约束的问题.文献[8-10]将模型预测控制应用于车辆路径跟踪并取得良好的效果.
文中基于模型预测控制算法,建立了车辆转向换道操纵动力学模型,并进行分析研究,验证了该方法求解汽车换道操纵逆动力学问题的可行性.通过与传统控制方法的比较,评价了模型预测控制方法的优越性.
1 计算模型
1.1 换道操纵模型
车辆转向换道操纵模型如图1 所示.正在行驶的汽车遇到同车道前方的固定障碍物时,驾驶员采取转向换道操纵的方法来避开障碍物.该系统采用车辆前轮转角作为输入.文中用于计算分析的车道宽度设定为3.5 m.

图1 汽车换道操纵示意图Fig.1 Schematic diagram of vehicle lane change
1.2 车辆模型
假设轮胎侧偏特性处于线性范围,汽车转向运动模型简化为图2 所示的具有侧向运动、横摆运动和纵向运动的三自由度线性汽车模型(具体可参见文献[11]),其运动微分方程如下:

式中:v 为汽车的侧向速度;u 为汽车的纵向速度;ωr为汽车的横摆角速度;m 为整车总质量;Iz为整车绕铅垂轴转动惯量;a、b 分别为整车质心至前、后轴的距离;δ 为前轮转角;Fyf为前轮侧偏力;Fyr为后轮侧偏力;Fxf为前轮驱动力/制动力,Fxf≥0 为驱动力,Fxf<0 为制动力;Fxr为后轮驱动力/制动力;Ff为滚动阻力,Ff=mg f,f 为滚动阻力系数;g 为重力加速度,Fw为空气阻力,Fw=CDAu2/21.15,CD为空气阻力系数,A 为迎风面积.汽车在平坦路面行驶,没有坡度阻力.为简化问题,只考虑了空气阻力和滚动阻力,没有考虑加速阻力.图2 中,θ 为质心航向角.

图2 三自由度汽车转向运动模型Fig.2 3-DOF vehicle steering model
若考虑驱动力/制动力对侧偏力的影响,则有

式中,φ 为路面摩擦系数,Fzf为前轮垂直力,Fzr为后轮垂直力,k1、k2分别为前、后轮综合侧偏刚度.
考虑纵向载荷转移,有

式中,hg为汽车质心高度.
2 转向操纵控制器设计
2.1 线性控制转向操纵模型
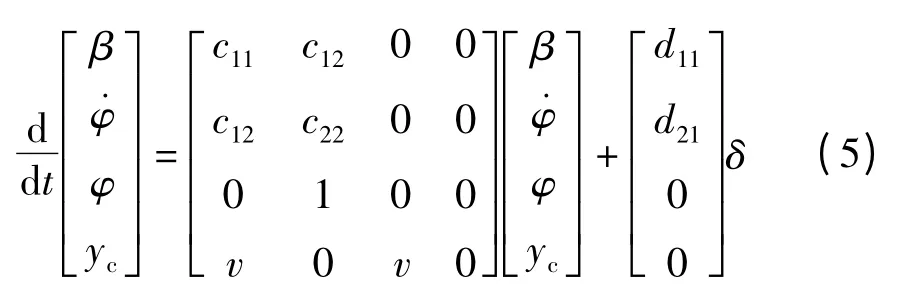
汽车侧向位移yc由公式(4)表示[12]:

式中,β 为质心侧偏角,φ 为横摆角,t 为时间.
车辆运动的状态方程可以表示为
2.2 模型预测控制
受驾驶员转向能力等因素的影响,受控制的转向系统需要处理许多制约因素,因此传统的控制理论不适合解决这些问题.此外,应用实时控制器时,用离线非线性规划来计算车辆轨迹的最优转向输入需要较高的计算成本.在约束条件下,该系统所需的控制性能由MPC 来实现[13].
2.2.1 障碍物避让目标函数
障碍物避让转向换道过程的目标函数是以汽车前部到障碍物之间的距离为基础的.如图3 所示,假设在t 时刻障碍物位置信息为N 个离散点的集合,第j 个点的位置可以表示为[14]:
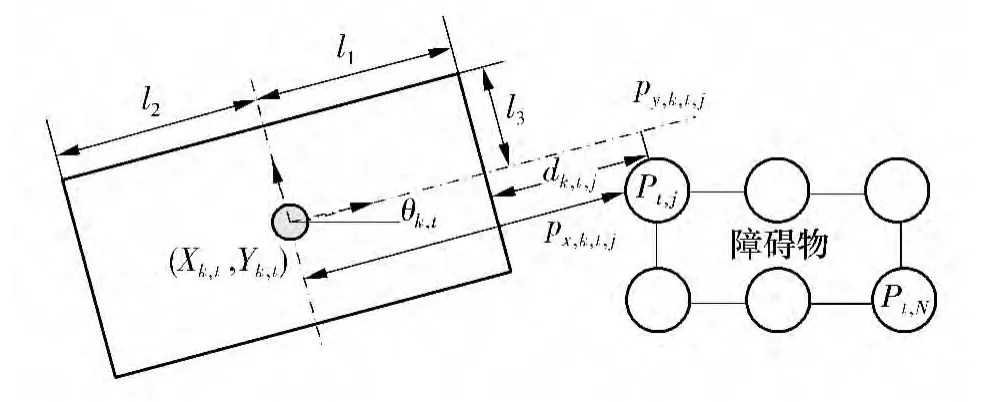
图3 车辆与障碍物位置信息Fig.3 Position information of vehicle and obstacle

如果这些点是在惯性坐标系中给出,则通过式(7)和式(8)转变成车辆坐标系.

在k 时刻,与在时刻t 预测的车辆和障碍之间的距离相关联的目标函数可以表示为

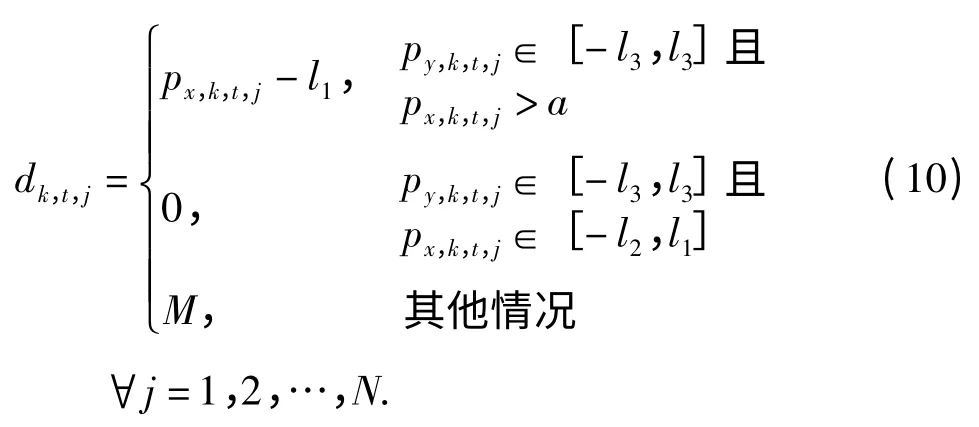
式中:l1、l2和l3为车辆尺寸;如果dk,t,j=0,表明碰撞发生;M 为一个足够大的常数以至于车辆视线范围内不会出现障碍物.
2.2.2 模型预测控制器设计
对于状态方程(5),输出方程如下:

控制器需要使用零阶保持离散状态空间模型,并且需要侧向位移yc和后轮侧偏力的采样值.参考轨迹为yref(t),目标函数被定义为

式中:Htr为跟踪时域;Hp为预测时域;Q 和R 为加权矩阵;输入矩阵Uk,t=[δ FxfFxr];Fxf为前轮制动力,Fxr为后轮制动力.
对此控制器的设计,控制步长设置为0.01 s,预测时域Hp设置为120 步,控制时域设置为5 步,输出方程的观察值为侧向位移.该控制器的设计增加了两种约束即前轮转角角速度和后轮侧偏力.这两种约束表示为:

方程(12)应满足条件(13)和(14)的约束.这样,汽车障碍物避让转向换道操纵逆动力学问题就转化为二次规划问题.对转化后的二次规划问题用有效集法求解[15].
3 数值仿真与控制效果对比
3.1 数值仿真
针对转向换道避让工况,以某型号的轿车为例进行仿真研究,计算所用轿车参数见表1.

表1 轿车仿真参数Table 1 Simulation parameters of vehicle
图4(a)-(c)分别为障碍物避让转向换道过程的横摆角速度ωr、侧向位移yc和前轮转角速度δsw(前轮转角δ 随时间变化的导数)的仿真结果.
由图4(a)看出,汽车在换到临近车道进行车体摆正时横摆角速度出现峰值,此时汽车容易出现侧滑或甩尾.大约经过5 s,汽车渐渐进入稳定状态.
图4(b)显示,汽车在满足约束条件下经过5 s完成换道过程,从而避开前方的障碍物,达到了良好的控制效果,确保了汽车的安全性.
由图4(c)可见,前轮转角在有约束条件下能得到控制.该结果表明,在较高摩擦系数情况下,转向换道避让性能取决于前轮转角速度上限.
3.2 控制效果比较
通过与线性二次型控制(LQI)效果的比较,文中评价了MPC 的控制性能.
图5、图6 分别为侧向位移yc和前轮转角δ 的控制效果对比图.由图5 和图6 可以看出,在进行转向换道操纵过程中LQI 控制器不能很好地控制车辆完成换道避让操纵,这是因为转向换道过程受多种约束条件的限制.因此,LQI 不适合此类多约束问题.而MPC 在处理车辆换道操纵多约束问题时表现更好.

图4 横摆角速度、侧向位移、前轮转角速度的仿真结果Fig.4 Simulation results of yaw rate,lateral displacement and front steering angle of vehicle

图5 侧向位移控制效果对比Fig.5 Comparison of control effect of lateral displacement
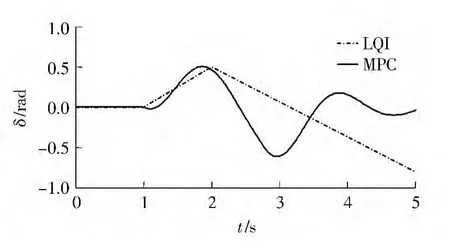
图6 前轮转角控制效果对比Fig.6 Comparison of control effect of front steering angle
4 结论
(1)模型预测控制能够应用于车辆避让转向换道操纵控制,并取得较好的控制效果.
(2)与传统控制方法相比,模型预测控制应用于车辆转向换道避让控制,更能体现模型预测控制的优势,进一步提高了控制效果.
(3)所提供方法可以为超车操纵(障碍物移动)控制提供理论支持.
[1]张丽霞,赵又群.汽车操纵逆动力学力输入识别研究[J].华南理工大学学报:自然科学版,2007,35(6):21-24.Zhang Li-xia,Zhao You-qun.Identification of force input in vehicle-handling inverse dynamics [J].Journal of South China University of Technology:Natural Science Edition,2007,35(6):21-24.
[2]José E Naranjo,Carlos González,Richardo Carcía,et al.Lane-Change fuzzy control in autonomous vehicles for the overtaking maneuver [J].IEEE Transactions on Intelligent Transportation Systems,2008,9(3):438-450.
[3]赵又群,尹浩,张丽霞,等.汽车操纵逆动力学的现状与发展[J].中国机械工程,2005,16(1):77-82.Zhao You-qun,Yin Hao,Zhang Li-xia,et al.Present state and perspectives of vehicle handling inverse dynamics[J].China Mechanical Engineering,2005,16(1):77-82.
[4]吴杰,赵又群,吴珂.基于逆问题求解的汽车操纵性能分析[J].中国机械工程,2006,17(4):435-439.Wu Jie,Zhao You-qun,Wu Ke.Analysis of lane-change vehicle maneuverability based on solution of inverse problems[J].China Mechanical Engineering,2006,17(4):435-439.
[5]尹浩,赵又群,徐培民,等.非线性高速汽车操纵逆动力学建模与仿真[J].农业机械学报,2007,38(9):23-25,33.Yin Hao,Zhao You-qun,Xu Pei-min,et al.Modeling and simulation of nonlinear vehicle handling inverse dynamics[J].Transactions of the Chinese Society for Agricultural Machinery,2007,38(9):23-25,33.
[6]Borrelli F,Bemporad A,Fodor M,et al.An MPC/hybrid system approach to traction control[J].IEEE Transactions on Control Systems Technology,2006,14(3):541-552.
[7]Falcone P,Borrelli F,Tseng H E,et al.Linear time-varying model predictive control and its application to active steering systems:stability analysis and experimental validation[J].International Journal of Robust and Nonlinear Control,2008,18(8):862-875.
[8]Borrelli F,Bemporad A,Fodor M,et al.An MPC/Hybrid system approach to traction control[J].IEEE Transactions on Control Systems Technology,2006,14(3):541-552.
[9]Falcone P,Borrelli F,Asgari J,et al.Predictive active steering control for autonomous vehicle systems[J].IEEE Transactions on Control System Technology,2007,15(3):566-580.
[10]Yoon Y,Shin J,Kim H J,et al.Model-predictive active steering and obstacle avoidance for autonomous ground vehicles [J].Control Engineering Practice,2009,17(7):741-750.
[11]张丽霞,赵又群,宋桂霞,等.汽车最速操纵问题的逆动力学研究[J].中国机械工程,2007,18(21):2628-2632.Zhang Li-xia,Zhao You-qun,Song Gui-xia,et al.Research on inverse dynamics of vehicle minimum time maneuver problem [J].China Mechanical Engineering,2007,18(21):2628-2632.
[12]Hidehisa Y,Shuntaro S,Masao N.Lane change steering manoeuvre using model predictive control theory [J].Vehicle System Dynamics,2008,46(Suppl):669-681.
[13]Ohtsuka T.A continuation/GMRES method for fast computation of nonlinear receding horizon control[J].Automatica,2004,40(3):563-574.
[14]Gao Yiqi,Lin Theresa,Borrelli Francesco,et al.Predictive control of autonomous ground vehicles with obstacle avoidance on slippery roads [C]∥Proceedings of the ASME 2010 Dynamic Systems and Control Conference.Massachusetts:ASME,2010:1-8.
[15]Sun Li,Fang Liang,He Guo-ping.An active set strategy based on the multiplier function or the gradient[J].Application of Mathematics,2010,55(4):291-304.
