A-SMGCS机场场面运行可重构Petri网建模
2013-08-01朱新平汤新民韩松臣
朱新平,汤新民,韩松臣
(南京航空航天大学民航学院,江苏 南京 210016)
A-SMGCS(先进场面引导与控制系统)能实现航空器滑行路由自动规划,有助于减轻管制员工作负荷并提升场面容量。欧美对A-SMGCS自动路由规划展开了一系列研究[1],并取得较多成果[2],但国内在该方面的研究不多。
以往研究有如下不足:①在运行环境建模方面,多将其建模为有向图模型[3-9],仅能反映场面各单元的邻接关系和相互间距,对管制规则约束描述不足。文献[10]将滑行道系统抽象为有向图并转换为Petri网,但仅是基于场面交通系统结构的静态属性展开。文献[11]建立了场面运行Petri网模型,采用模型标识来描述管制规则约束,并提出在运行条件变化时,对应模型应进行重构调整,但并未给出具体方法;②在活动目标建模方面,多假设航空器滑行速度为某一恒定值,忽略了航空器在不同区域的滑行速度。笔者给出了一种面向A-SMGCS路由规划的场面运行扩展赋时库所Petri网建模方法。
1 场面运行环境建模
1.1 场面运行单元划分
场面运行环境可分为跑道、滑行道直线段、交叉口、机位活动单元和机坪滑行单元。其中,跑道为飞行区交通系统核心,进离港航班在该单元完成起降过程,且在不同条件下跑道运行方向可能会调整;滑行道直线段为运转区滑行道系统的主要部分,航班进离港滑行大部分在直线段上进行,且应遵循一定的管制规则;交叉口为航班滑行过程中改变航向的场所;机位活动单元为航班进入或离开机位的活动区域;机坪滑行单元为机位附近的机坪滑行线,航空器可通过该单元转入或离开机位活动单元。
1.2 场面单元对应的ETPPN模型
定义1扩展赋时库所Petri网(ETPPN)定义为 ETPPN={P,T,I,O,M0,φ,Γ,f}。其中,库所集合P和变迁集合T满足P∩T=Φ,P∪T≠Φ;I、O分别为模型的前向和后向关联矩阵;M0为模型初始标识;φ:P→D为库所标识应持续的时间函数,D={dτ1,dτ2,…,dτn}为持续时间集合;Γ:P→Ψ为库所集合到约束集合的映射,其中Ψ ={α1,α2,…,αn}为约束集合;f:T × P→{0,1}为变迁集合到库所集合的测试函数。当pi中所有约束 αi(i=1,2,…,n)均满足时,f(t,pi)=1。
若ETPPN中变迁t∈T使能,当且仅当以下条件同时满足:①若库所pi∈(p)t被标识的时刻为 xi,对应的持续标识时间为 dτi,所有 pi∈(p)t均被标识,且当前时间;② 存在库所 pi∈ t(p),满足 f(t,pi)=1。
(1)用ETPPN建立跑道Petri网模型。图1为跑道ETPPN模型,其中图1(a)为离港航班跑道占用过程模型,图1(b)为进港航班跑道占用过程模型。图1中,变迁td和to分别表示离港航空器滑入和起飞离开跑道;变迁ta表示进港航空器对准跑道降落;变迁t1、t2、t3表示航空器从不同脱离口脱离;资源库所pir为跑道按方向i运行的可用状态;状态库所pi为跑道按某一方向运行状态;由映射φ:P→D可确定pi对应的dτi,表示某一机型在该跑道上起降占用跑道时间;由映射Γ:P→Ψ可确定pi对应的约束,包括离港占用跑道约束α1i、进港占用跑道约束α2i,以及条件性关闭或开放约束α3i。

图1 某一运行方向下的跑道ETPPN模型

图2 滑行道直线段单向运行模式对应的ETPPN模型
(2)用ETPPN建立的滑行道直线段Petri网模型如图2所示。图2(b)为滑行道直线段单元单向运行模式对应的ETPPN模型。其中,库所pir表示直线段资源状态;状态库所p1i表示直线段zi处于方向1运行模式;由映射φ:P→D可确定对应的,表示某一机型在该直线段滑行所需时间;由映射Γ:P→Ψ可确定p1i对应的约束,包括可用机型约束 α1i、滑行速度约束 α2i、条件性关闭或开放约束α3i、必经点约束 α4i和滑行方向约束 α5i。
分时双向运行直线段(即在不同时段内允许航空器沿某一方向滑行)对应的ETPPN模型如图3所示,其建模步骤如下:①按照图2(b)中模型的建立方法,建立直线段单元各单向运行模式对应的ETPPN模型,如图3(b)所示;②对步骤①所得到的各单向运行模型,将其中属于同一直线段单元的资源库所进行联合,如图3(c)所示。在图3(b)中,两个同名资源库所pir均描述同一直线段的资源可用状态,故可将其合二为一并保持该库所与其他变迁的连接关系不变。
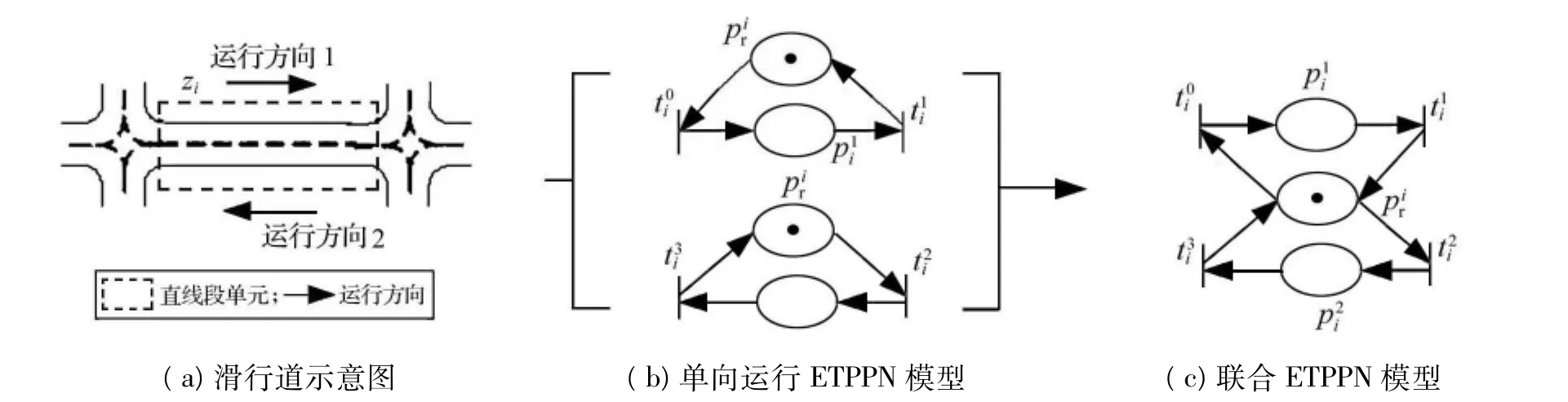
图3 直线段双向运行模式对应的ETPPN模型
(3)用ETPPN建立的滑行道交叉口Petri网模型如图4所示。图4(b)为交叉口入口I的3种运行方式对应的Petri网模型。在该模型中,资源库所pjr表示该交叉口的资源状态;状态库所分别表示3种运行方式对应的状态;由于交叉口同时只能允许一架航空器占用,故各状态库所的输入变迁同时只能有一个被激发。图4(b)所示模型仅给出该交叉口入口I各种运行方式对应的ETPPN模型,其他入口不同运行方式的子模型,可用类似方法建立。
(4)用ETPPN建立的机位活动单元Petri网模型如图5所示。航空器进机位滑行通常采取自滑入机位或拖车拖入机位两种方式。图5(a)和图5(b)虚线框所示分别为机位活动单元及其对应模型。其中,资源库所pjr表示该机位的资源状态,当该库所被标识时,表明对应机位可供使用;状态库所pj表示该机位运行状态,当该库所被标识时,表明对应的机位处于被占用状态。与此同时,在机位活动单元模型之间引入虚拟库所(如图5(b)中库所piv、psv),实现与机坪滑行单元模型的衔接。

图4 交叉口某一入口运行过程ETPPN模型
(5)用ETPPN建立机坪滑行单元Petri网模型如图6所示。航空器在机坪滑行单元按路线滑行,并转入或离开某一机位活动单元。图6(a)中虚线框所示部分为两个机坪滑行单元,假设其运行方向如箭头所示。对每一个滑行单元均可采用与运转区滑行道直线段类似的方式建模,得到对应的ETPPN模型,如图6(b)中虚线框所示。与此同时,在两个单元对应模型间引入虚拟库所,通过该库所实现与机位活动单元模型的衔接。

图6 机坪滑行单元及其对应的ETPPN模型
利用上述各单元对应的ETPPN模型,采用同步合成技术[12]即可实现运转区场面环境建模,而对机坪环境建模,则可将机坪滑行单元与机位活动单元模型的虚拟库所进行叠加来实现。
2 航空器活动建模
A-SMGCS路由规划提供最优滑行路径以及航空器经过各参考点的时间,并保证规划阶段无冲突出现[13]。
航空器场面滑行可分为直线滑行和弯道滑行两种形式。A-SMGCS控制下的航空器场面滑行具有以下特征:①当航空器先后通过的两路段均为同一类型(直线或弯道)时,无须加减速;②当航空器从弯道滑入直线段时,须启动加速过程;③当航空器从直线段滑入弯道时,减速过程通常在进入弯道前结束。图7中,航空器从直线段单元zi进入并通过交叉口sj的过程中,若选择直线段bd段或弯道bc段滑行,由于具有不同的速度调整要求,因此会导致航空器占用直线段单元zi和交叉口单元sj的时间发生变化。

图7 航空器滑行过程
由上述分析可知,航空器加(减)速均发生在直线段滑行过程中,设航空器弯道正常滑行速度为vc、直线段正常滑行速度为vs、加速度为 aacc(取1.5 m/s2)、减速度为 adec(取 -1.5 m/s2),对航空器执行路径 r=(m,k,f,p,…,s,n)的滑行过程,其速度特性曲线如图8所示(假设航空器起始滑行段mk和终止滑行段sn均为直线段)。

图8 航空器执行某一滑行路径过程中的速度特性曲线
3 场面ETPPN模型的自动重构
场面运行条件变化时(如某些路段临时关闭、跑道运行方向改变等),所建模型应能动态调整,以保证在此基础上所得路由规划结果的实用性。可重构Petri网[14]将体现模型结构调整需求的重构规则动态作用于Petri网模型,实现对模型局部结构的调整,因此可引入到场面ETPPN模型建模中。
定义2可重构场面ETPPN模型定义为多元组Q=(Γ,M0,R),其中 Γ 为场面 ETPPN模型;M0为模型的初始状态;R={r1,r2,…,rn}为各单元模型的重构规则集。
定义3重构规则r∈R定义为3元组r=(D,*r,r*),其中D为重构规则对应模型中的库所集合;*r:(D×T)∪(T×D)→IN和r*:(D×T)∪(T×D)→IN分别描述重构规则作用之前和之后库所集与变迁集之间的连接关系,其中T为重构规则对应模型变迁集,IN为自然数集。
借鉴可重构Petri网,将场面ETPPN模型的重构规则r表示为:

其中,符号“↔”两侧分别为模块在重构规则r作用前后,库所集与变迁集之间的连接关系。
定义4场面重构规则生成映射定义为Ω:,其中为模型对集合,dk,ek为单元 k在不同运行条件下的ETPPN模型,dik、ejk分别为单元对应的运行条件i和j;{Fk}为单元对应的管制规则集合;{rn}为模型对应重构规则集合,其中k=1,2,…,p 为模块编号,i,j=1,2,…,q 为模块对应单元的运行条件编号。
飞行区场面运行条件变化的情形通常有:①跑道运行方向发生变化;②滑行道直线段临时性关闭或运行方向变化;③滑行道交叉口临时关闭;④某些机位活动区临时关闭;⑤除冰区的启用或关闭。对上述情形,依据定义3和定义4可确定重构规则r∈R。可重构场面ETPPN模型自动重构算法的步骤如下:
(1)对每一个场面单元,分析可能出现的运行条件变化,并确定运行条件对集合{(dik,ejk)},然后建立各运行条件下该单元对应的模型dk、ek,并确定对应的管制规则集合{Fk};
(2)由定义3和定义4确定运行条件变化时,场面运行单元对应模型之间的重构规则集{rn},其中 rn=(Dk,*rn,r*n);
(3)判断场面运行单元的运行条件是否发生变化。若是,则由定义4指派对应的重构规则rn,并转步骤(4);否则,继续步骤(3);
(4)利用重构规则 rn=(Dk,*rn,r*n),刷新模型中相应模块所含库所集Dk与变迁集的流关系。
4 仿真试验
在Anylogic仿真平台上,以首都机场T3E航站楼东侧飞行区为例,进行场面ETPPN模型建模与重构仿真试验。考虑到飞行区地域广阔,仅对图9(a)中虚线框标识部分的飞行区进行建模分析。
首先对该部分飞行区进行典型单元划分(如图9(b)所示),包括机坪滑行线单元z7~z9,机位517对应的机位活动区z10,各单元的运行方向如箭头所示。
在场面ETPPN模型的建模过程中,首先采用Anylogic建立各典型运行单元的ETPPN模型,然后合成得到最终的模型,如图10所示。
采用Anylogic控件动作模拟管制员指令输入,并将以XML文件形式(*.alp文件)存储的场面ETPPN模型利用Java程序进行解析,然后将重构算法作用于解析所得模型中的相关部分,即可实现场面模型的重构。以机位517对应区域z10为例,当该机位临时关闭时,对应的重构规则为。在Anylogic仿真平台上,将重构算法作用于模型的相应部分(图11方框所示部分),即可得到重构完成后的模型。其他运行条件改变时(如滑行道或跑道运行方向发生变化),也可采取类似方式完成模型重构。

图9 首都机场T3E航站楼东侧飞行区及其某一部分区域的典型运行单元划分

图10 图9(b)对应的场面ETPPN模型

图11 机位临时关闭时图10模型的重构
5 结论
笔者提出了面向路由规划的场面运行可重构ETPPN模型建模方法,该方法具有以下特点:①提出一种扩展赋时库所Petri网,并以场面典型单元划分为基础展开模块化建模,体现了场面交通系统拓扑结构以及管制规则约束,降低了建模复杂度并保证模型的可重用性;②借鉴可重构Petri网原理,提出场面ETPPN模型动态重构机制,可快速、连续地体现场面运行条件变化,从而保证了以此为基础所给路径规划结果的实用性。
[1] CAROTENUTO S.State of the art in A -SMGCS[R].Germany:European Commission,2005.
[2] ATKIN J,BURKE E,RAVIZZA S.The airport ground movement problem:past and current research and future directions[C]//Proc.of the 4th International Con -Conference on Research in Air Transportation.Budapest:[s.n.],2010:131 -138.
[3] ROLING P C,VISSER H G.Optimal airport surface traffic planning using mixed-integer linear programming[J].International Journal of Aerospace Engineering,2008(1):1-11.
[4] GARCIA J,BERLANGA A,MOLINA J M,et al.Planning techniques for airport ground operations[C]//Proc.of the 200 Digital Avionics Systems Conference.[S.l.]:IEEE Press,2002:1-12.
[5] GARCIA J,BERLANGA A,MOLINA J M,et al.Optimi-zation of airport ground operations integrating genetic and dynamic flow management algorithms[J].AI Communication,2005,18(2):1 -23.
[6] SMELTINK J W,SOOMER M J,WAAL DE P R,et al.An optimisation model for airport taxi scheduling[C]//Proc.of the INFORMS Annual Meeting.Denver:[s.n.],2004:1 -25.
[7] BRINTON C,KROZEL J,CAPOZZI B,et al.Improved taxi prediction algorithms for the surface management system[C]//Proc.of the AIAA Guidance,Navigation,and Control Conference and Exhibit.Monterey:[s.n.],2002:1 -11.
[8] CLAYTON J,CAPOZZI B.Dynamic airport configuration and resource scheduling[C]//Proc.of the AIAA 4th Aviation Technology,Integration and Operation(ATIO)Forum.Chicago:[s.n.],2004:1-12.
[9] GOTTELAND J,DURAND N.Genetic algorithms applied to airport ground traffic optimization[C]//Proc.of the 2003 Congress on Evolutionary Computation.[S.l.]:[s.n.],2003:544 -551.
[10] 张威,谢晓妤,刘晔.基于Petri网的机场场面路径规划探讨[J].现代电子工程,2007,4(1):59-61.
[11] 汤新民,王玉婷,韩松臣.基于DEDS的A-SMGCS航空器动态滑行路径规划研究[J].系统工程与电子技术,2010,32(12):2669 -2675.
[12] 王化冰.一种基于同步合成Petri网的FMS建模方法[J].系统工程理论与实践,2001(2):35-42.
[13] International Civil Aviation Organization(ICAO).Advanced surface movement guidance and control systems(A - SMGCS)manual[S].2004.
[14] LLORENS M,OLIVER J.Structural and dynamic changes in concurrent systems:reconfigurable petri-nets[J].IEEE Transactions on Computers,2004,53(9):1147-1158.
