基于单晶炉的机械装备工作原理动画自动生成方法
2013-07-07吴恩启杜宝江吴志豪
袁 婧, 吴恩启, 杜宝江, 吴志豪
(1.上海理工大学机械工程学院,上海 200093;2.上海汉虹精密机械有限公司,上海 200444)
基于单晶炉的机械装备工作原理动画自动生成方法
袁 婧1, 吴恩启1, 杜宝江1, 吴志豪2
(1.上海理工大学机械工程学院,上海 200093;2.上海汉虹精密机械有限公司,上海 200444)
提出了基于SolidWorks操作环境的工作原理动画自动生成方法.在SolidWorks环境下,利用其应用程序接口(API),采用高级语言进行二次开发,构建了机械装备的装配约束与运动副之间的相对链接.该方法实现了工作原理交互动画的自动生成,大大提高了虚拟培训系统的搭建效率.
虚拟培训;工作原理;动画生成;交互;SolidWorks
随着计算机信息技术的发展,虚拟技术开始应用到各个领域的培训中.对于操控界面复杂、工作环境恶劣的机械装备来说,虚拟培训的作用尤为重要,其不但解决了在培训过程中使用模型、视频、讲解等方式难以模拟真实工作场景的问题,而且在培训内容、培训地点和培训时间的选择上也都更加灵活[1].
现有的培训系统大多采用物理仿真与软件仿真相结合,物理仿真通过专用设备实现,系统庞大、复杂、造价昂贵,如核动力装置培训模拟器、航空飞船运行模拟等.软件仿真主要以接线图、数字图表、设备照片和录像等常规多媒体方式作为表现,不适合机械设备现场施工的培训,其真实感、临场感和表现力都无法满足,培训效果不真实直观[2].结合以上两种方法所开发的虚拟培训系统,弥补了单一方法的不足.但由于三维CAD软件如UGII、Pro/E及CAXA等,只能导出VRML(virtual reality modeling language)格式的静态样机或不可交互的VRML格式动画.因此,还需要对其进行编辑.机械产品的虚拟装配事件体系流程相似,采用手工编程会有大量的重复性工作[3-5].所以,虚拟培训系统仍然存在开发周期长,效率低等问题.
为了缩短虚拟培训系统的开发周期,实现虚拟培训系统的快速搭建,关键是提高工作原理动画的生成效率.本文通过分析一般机构零部件运动的共性,以SolidWorks软件为支撑,利用其应用程序接口API函数[6],采用高级语言对其进行二次开发,实现了工作原理动画自动生成,即获取三维软件中运动零部件的位姿信息并对其进行存储,进而生成相应的VRML格式动画,其中,VRML是虚拟现实造型语言的简称,是面向对象三维造型的一种解释性语言.本方法已经应用于实际的虚拟培训系统,大大提高了动画生成效率.
1 工作原理自动生成方法
在SolidWorks中,通过对机械装备中的装配约束关系进行分析计算,进而转换出相应零部件的工作原理动画.其中的关键技术主要包括运动关系建立、零部件位置信息获取、数据处理、代码生成和代码导出5个部分,如图1所示.
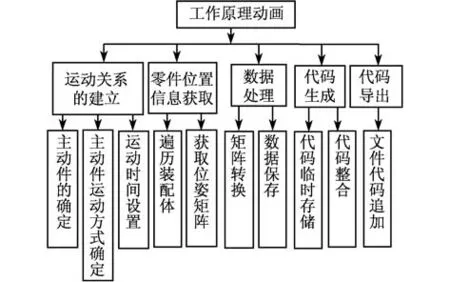
图1 工作原理动画生成原理Fig 1 Principle of generating working principle animation
在SolidWorks中实现机械装备工作原理动画的自动生成,需要确定装配体中的运动关系及运动件在装配体空间中的位置和其自身几何信息,并将其转换为VRML可以识别的代码.首先确定装配体的主动件、主动件运动方式以及运动时间,遍历SolidWorks中装配体,确定所选择的零部件,获得其操作句柄,利用SolidWorks的API函数获取其位姿矩阵,从而获得零件空间在装配空间的准确位置信息;其次,利用SolidWorks的API函数获取位姿矩阵,通过VRML语言规范约束,将其转换为位置节点Transform中translation和rotation的值,其中,Transform节点用来表示相应模型在虚拟场景中的位置.当对零件的一步动画设置完成后,将这步动作用VRML已知数据表达出来,并临时保存在一个字符串数组内,每个零件的动作都设置完成后,每一步都有相应的子代码,然后再将这些子代码整合成一个长字符串,其中,每个子代码都应该符合VRML的语言规范,包括时间传感器、位置插补器、路由传递代码等;最后进行代码追加,即用于建立动作的VRML代码都生成后,将这些代码导出到只含有零件几何信息的VRML格式文件中.
2 模型结构信息的获取
一个完整的装配体主要由零部件及其配合组成,以单晶炉的籽晶部件为例,其结构层级如图2所示,树形结构与三维装配体模型结构树的对应关系如表1所示.

图2 单晶炉籽晶部件结构层级Fig 2 Structure layer of components of seed crystal

表1 树形结构与三维装配体结构树的对应关系Tab.1 Relationship between tree structure and 3D assembly structure tree
从表1可以看出,实际三维模型的结构组成与树形结构具有一一对应关系,采用树结构的遍历算法来计算并生成三维模型的拓扑关系.
通过自定义TraverseComponent2函数实现对装配体的遍历,即在SolidWorks中依次直接打开相应的零配件,并另存为相应的文件格式,同时以相应的规则命名.此时,生成的零配件并没有相应的在装配体中的坐标信息,系统通过后台追加代码的形式,自动填入对应的坐标信息,并自动检测删除不必要的模型信息,以简化模型,从而完成一次模型的转换.图3为模型本地保存及简化的流程图.
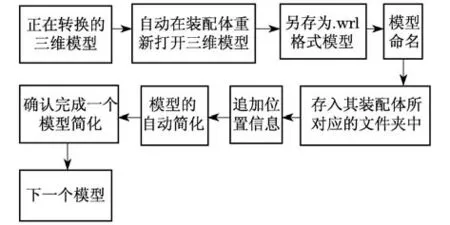
图3 模型保存流程图Fig.3 Process of model saving
通过模型遍历、模型命名和代码追加所形成的VRML模型的结构树如图4所示.
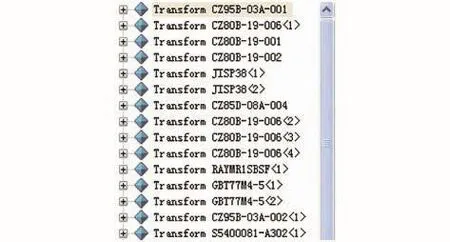
图4 VRML装配体结构树Fig.4 Assembly structure tree of VRML
根据三维模型命名的规则,通过遍历装配体的方式,在三维CAD软件中获取模型的位置信息,进而实现虚拟样机几何模型的批量自动生成,并通过三维模型的层次关系在本地生成对应的文件夹以保存三维几何模型.
3 模型空间信息的获取
在装配环境中有零件坐标系和绝对坐标系这两种坐标系.而在虚拟环境下,计算机也通过两个坐标系记录和表示机构各零部件的位姿信息,惯性坐标系和连体坐标系,也称为世界坐标系和局部坐标系[7-8].
在三维几何空间中,可以采用齐次坐标技术来描述空间各点坐标及各种变换.当一个零件被加入到一个装配体时,就会建立一个位姿矩阵,该位姿矩阵确定了零件坐标系原点在绝对坐标系中的位置,以及零件坐标系在绝对坐标系中的方向矢量[9-12].
机械装备中的零件体在其装配体中的位置,在三维CAD软件中是由式(1)所示4×4的位姿矩阵决定的.
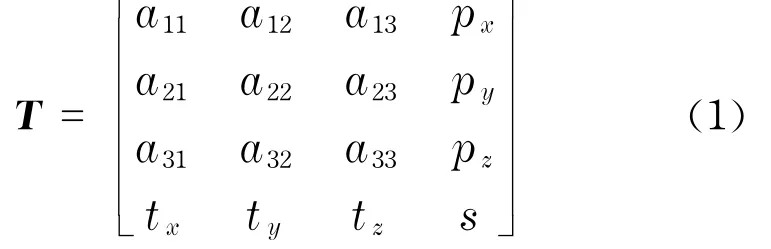
式中,a11,a12,…,a33为3×3的旋转子阵;px,py,pz定义了平移向量;s为缩放因子;tx,ty,tz用于透视变换.
为了确定生成的三维模型在场景中的位置,并设定后期仿真运动的参数,需要从位姿矩阵中获取零部件的坐标信息以转变为虚拟场景中能够识别的坐标信息,即利用SolidWorks的API函数获取位姿矩阵,将其转换为位置节点Transform中translation和rotation的值.并将转换后的数据进行存储,实现后期代码的生成.表2为模型在三维CAD中的位置信息同虚拟场景中的坐标信息的对应关系.

表2 矩阵与坐标信息对照表Tab.2 Corresponding table between matrix and position coordinates
4 交互动画的生成
为实现对VRML所表示模型在场景中空间位置节点Transform的translation和rotation这2个参数的赋值,通过手动求解位姿矩阵的方式,可得所需参数,但计算量大,且容易出错.因此,本文利用SolidWorks的API函数获取矩阵中每个元素的值,并通过VRMLPAD编辑器的API函数接受所有的值,从而获得虚拟场景中所需要的translation和rotation的值.其中,某一模型由SolidWorks的API函数获取的位姿矩阵与VRML中位姿矩阵分别如式(2)和式(3)所示.
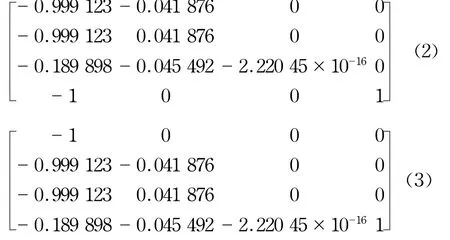
对比式(2)和式(3),通过data(0)= swCompTransform.arraydata(9),…,data(10)= swComp Transform.arraydata(7),data(11)= swComp Transform.arraydata(8)实现SolidWorks中位姿矩阵与VRML位姿矩阵的统一.然后通过Set translation=fields.Item(8)、Set rotation= fields.Item(5)实现由SolidWorks的API函数获取矩阵中每个元素的值,并通过VRMLPAD编辑器的API函数接受所有的值,从而获得虚拟场景中所需要的translation和rotation的值,实现将4.5 M单晶炉籽晶部件SolidWorks文件转化为仅有182 k的VRML文件.
图5为动画设置界面.图6为生成的VR(虚拟现实)交互运动界面.
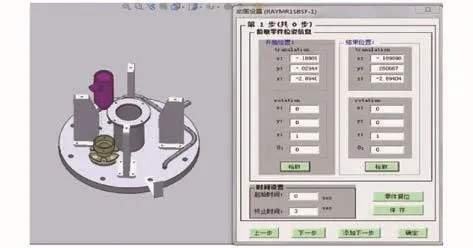
图5 动画设置界面Fig.5 Interface setting of animation

图6 VR交互运动界面Fig.6 VR interactive interface
5 结 论
利用SolidWorks的应用程序接口,采用高级语言对SolidWorks与VRMLPAD进行二次开发,实现了机械产品工作原理的VRML格式动画的自动生成.生成的动画具有交互性、数据量小等特点,实现了机械产品虚拟培训系统动画的快速生成.该方法已应用于单晶炉等机械装备的虚拟培训系统搭建过程中,大大提高了系统的开发效率.
[1] 吴恩启,王宝震,闵锐,等.盾构机虚拟培训关键技术[J].计算机系统应用,2012,21(3):151-153.
[2] 张炳达,张瀑.虚拟现实开发平台在变电站仿真系统中的应用[J].高电压技术,2008,34(2):338-341.
[3] 孙军华,季忠,王忠雷,等.基于Delphi和VRML的虚拟装配平台的实现[J].机械科学与技术,2003,22(5):855-857.
[4] 熊劫,陈廷雨.插齿机主传动机构的运动学仿真与优化设计[J].上海理工大学学报,2005,27(5):425-427.
[5] 冯金芝,喻凡,李君.基于虚拟样机技术的铰接式车辆动力学建模[J].上海理工大学学报,2004,26(4):372-374.
[6] 平海涛,吴志林,莫根林.基于SolidWorks API零件参数化技术的优化与应用[J].煤矿机械,2011,32(1):235-237.
[7] 郭伟祥,刘光复,刘志峰.产品拆卸运动仿真与干涉分析[J].计算机集成制造系统,2006,12(4):516-519.
[8] 张志贤,刘检华,宁汝新.虚拟环境下平面连杆机构运动仿真实现技术研究[J].计算机研究与发展,2010,47(6):979-986.
[9] Marquis-Favre W,Bideaux E,Scavarda S.A planar mechanical library in the AMESim simulation software. Part I:Formulation of dynamics equations[J].Simulation Modelling Practice and Theory,2006,14(1):25-46.
[10] Marquis-Favre W,Bideaux E,Scavarda S.A planar mechanical library in the AMESim simulation software. Part II:Library composition and illust rative example[J]. Simulation Modelling Practice and Theory,2006,14(2):95-111.
[11] Yang R D,Fan X M,Wu D L,et al.Virtual assembly technologies based on constraint and DOF analysis[J]. Robotics and Computer Integrated Manufacturing,2007,23(4):447-456.
[12] Liu Z Y,Tan J R.Constrained behavior manipulation for interactive assembly in a virtual environment[J]. The International Journal of Advanced Manufacturing Technology,2007,32(7):797-810.
(编辑:石 瑛)
Automatic Generation of Working Principle Animation of Mechanical Equipments
YUANJing1, WUEn-qi1, DUBao-jiang1, WUZhi-hao2
(1.College of Mechanical Engineering,University of Shanghai for Science and Technology,Shanghai 200093,China;2.Shanghai Hanghong Precision Machinery Co Ltd,Shanghai 200444,China)
A method was proposed,which can generate the working principle animation automatically based on SolidWorks.With the application programming interface(API)of SolidWorks and advanced language,the relative links between the static assembly relationship of parts and their regular movement were established.The method realizes the automatic generation of the interactive animation of working principle.It improves the efficiency of the establishment of virtual training system.
virtual training;working principle;generate animation;interactive;SoildWorks
TP 391.72
A
1007-6735(2013)03-0281-04
2012-07-08
上海市重点学科建设资助项目(J50503);上海市研究生创新基金资助项目(JWCXSL1102)
袁 婧(1986-),女,硕士研究生.研究方向:虚拟制造、CAD/CAE/CAM.E-mail:fkevge9906@hotmail.com
吴恩启(1972-),男,副教授.研究方向:无损检测、CAD/CAE/CAM.E-mail:weqsd@163.com
