基于核函数法及粒子滤波的煤矿井下定位算法研究*
2013-06-20崔丽珍员曼曼
崔丽珍,李 蕾,员曼曼,李 璋
(内蒙古科技大学信息工程学院,内蒙古包头014010)
近年来,定位导航系统不管是在军用还是民用领域中都有着广泛的成功应用,这种基于位置的服务LBS(Location-Based Service)包含了个人安全服务、交通导航系统以及本地信息服务等。随着普适计算的推广,作为物联网重要的支撑技术之一,无线定位技术在“感知煤矿”中的应用越来越得到学术界的关注。煤矿巷道一般深处地下几百米到几十千米,因此地面上广为使用的GPS(Global Positioning System)在井下完全失效。伴随着无线传感器网络的迅猛发展,无线传感器节点为煤矿井下特殊复杂的信道环境[1]中人员及设备提供准确实时的位置信息服务逐渐成为可能。
自20世纪末以来,国内外井下监控系统中采用的无线信号有红外、超声波、射频信号。井下环境受到严重的多径效应和阴影效应的影响,信号到达接收端具有不同的时延和入射角,利用传输时间TOA(Time of Arrival)和到达角度AOA(Angle of Arrival)参数估计误差相对较大[2],且分别需要精确的时间同步和天线阵列。相比较下,RSSI由射频芯片本身提供,方便获取,利用相关滤波算法可以降低巷道中多径、遮蔽效应带来的误差,因此,基于RSSI的煤矿井下定位技术目前受到较大关注。
煤矿井下巷道是一个狭长的电磁传播受限环境,其中风墙、风桥、风门等设施对无线信号传输有一定的影响,其程度取决于设施的构成材料,而井下巷道具体环境也不尽相同,因此射频信号的传输也变得复杂无章。故本文提出一种应用在煤矿井下基于核函数与粒子滤波的指纹匹配定位算法。
1 相关研究
目前,无线定位技术已成为国内外学者研究热点之一,并且在室内环境、煤矿井下的定位研究中做了一定工作。由微软公司较早提出的室内定为系统RADAR[3],利用了最邻近法和K邻近法指纹匹配技术,还考虑墙壁对射频信号传播的影响,提出了室内无线信号衰减模型,该系统定位运算效率高,但在实际应用中定位的精度相对较低。文献[4]利用接收信号强度对WLAN中用户进行定位,提出了基于概率的核函数法和直方图法,并与确定型最邻近定位算法做出比较,通过实际试验证明基于概率方法更具备鲁棒性,定位精度更高。文献[5]将粒子滤波目标追踪与贝叶斯滤波相结合,采用了机器训练方法得到似然函数,对比了核函数法、最邻近法、K邻近法与Viterbi-like算法,实验数据表明利用核函数法的结果进行粒子滤波追踪性能更优越。对于煤矿井下定位技术的研究,中国矿业大学物联网研究中心在文献[6-7]中通过对井下信息采集,利用手指模将贝叶斯公式法与最邻近法融合的算法,实际定位中平均误差3.3 m,小于K邻近法5.8 m的误差。
本文将从如下几个部分阐述所提出定位算法:第2部分介绍几种定位算法;第3部分详细介绍了基于核函数及粒子滤波定位算法的原理;第4部分对本文算法设置实验,对结果进行分析;最后进行了总结。
2 定位算法
定位算法首先需要建立无线信号与距离或位置间的映射关系。一种是根据信号衰减与传输距离间关系建立起路径损耗模型,通常有自由空间模型、Shadowing模型[8]、“分区依赖”模型[9]等,再将接收到信号强度转换成传输距离;另一种基于信号强度与位置间一一对应关系建立数据库,采用匹配算法确定节点坐标。前者的优点在于无需建立数据库,在某种环境中建立起的模型不必因信标节点的改变而改变,但现实中信号接收强度受外界干扰较大导致定位精度低,后者建立的关系数据库会因信标节点位置的改变而重新建立,但具备较高的定位精度。考虑到煤矿井下各种设施、线缆、金属管道繁多,巷道结构、形状及道壁表面有一定差别,本文采用基于位置指纹匹配的定位算法。
2.1 指纹匹配算法
指纹匹配法利用接收信号强度作为位置的标记,主要包括两个阶段:离线训练阶段和在线定位阶段[10]。在离线训练阶段,首先布置一个或多个信标节点,然后在待测区域内合理分配多个训练点,最后顺序测得训练点上节点接收所有信标节点发射的信号强度值,将其作为指纹信息与位置信息一同存入数据库中。在实时定位阶段,由多个信标节点测量到的RSSI值构建指纹信息,并与之前离线训练阶段数据库中的指纹信息进行匹配处理,最终得到未知节点位置。
对于估计最终目标的位置,有多种指纹匹配法,根据匹配指纹信息的特征可分为确定型定位方法和基于概率的定位方法。
2.2 确定型定位方法
在确定型定位过程中,未知节点的指纹信息直接与数据库中的信息进行比对,利用曼哈顿距离或欧几里得距离求出最接近的一个或几个数据库中的指纹作为匹配结果。常用的算法有:最邻近法NN(Nearest Neighbor)、K邻近法KNN(K Nearest Neighbors)、K加权邻近法KWNN(K Weighted Nearest Neighbors)。
KWNN算法中,K值为任意值,根据具体实际定位效果选取。当K=1,权值W=1时,为NN算法,当K个数据的权值W都为1/K时(即样本的质心),为KNN算法。若用欧几里得距离表示相似度,该算法可表示为:
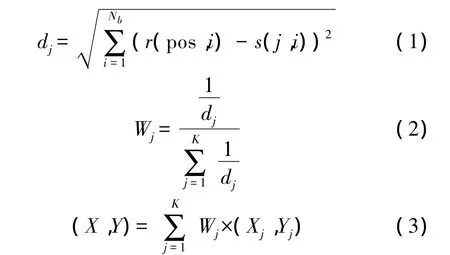
式中,r(pos,i)表示在位置pos处第i个信标接收未知节点的信号强度,s(j,i)表示在训练点j处的第i个信标接收的信号强度,dj表示未知节点与训练点j的近似程度,Wj和(Xj,Yj)分别是训练点j所占权重和坐标,(X,Y)为最终估计位置。
2.3 基于概率型方法
在未知节点位置不变情况下,即使发射信号强度相同,由于井下环境影响或一些人为因素干扰,也会导致信标节点接收到的信号强度产生波动,因此,采用指纹信息的概率更能准确表示未知节点所在位置。该方法基于每个训练点RSSI分布先验假设和该分布的统计特征[11],在线定位阶段利用贝叶斯估计计算目标位置的后验概率,最后选择最大后验概率的训练点作为估计位置。由贝叶斯准则可知:
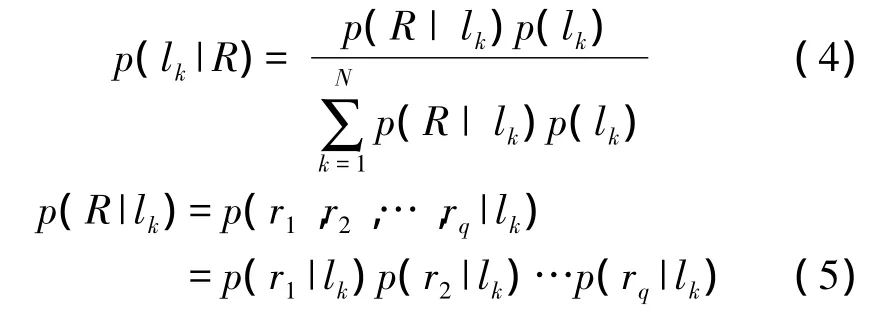

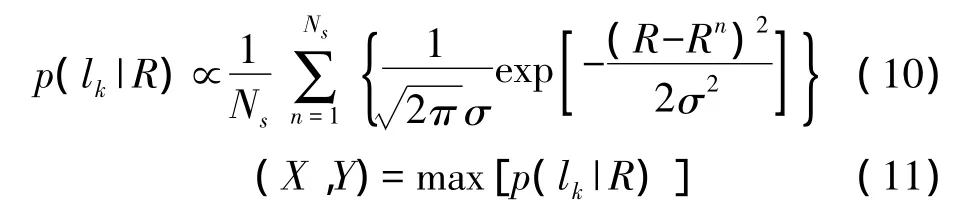
最大后验概率取决于似然函数和先验概率,若p(lk)相同(即先验概率不偏向任何一个特殊位置),则最大后验概率取决于似然函数。一般情况,似然函数可采用基于高斯分布的接收信号强度统计模型[7]即:

由于煤矿井下环境受多径衰落、阴影效应、粉尘等因素干扰,RSSI具有很强的时变性,高斯分布并不能很准确的反映出RSSI分布规律,故本文采用核函数作为似然函数。
3 核函数及粒子滤波定位算法
3.1 核函数法
核函数法将每个训练点上的每个样本数据赋予一个以自身为“核心”的函数,等权重的所有样本对应核函数的总和为在该位置处的概率密度分布。以核函数法构造的似然函数模型可以更精确地表示RSSI概率密度分布情况,其函数模型可以表示为:

式中,K(*,Rn)为核函数,Ns为样本数,Rn为数据库中第n个样本的RSSI指纹。核函数有均匀核函数(Uniform kernel)、Epanechnikov核函数、高斯核函数(Gaussian kernel)[5]等,通常选用高斯核函数:

式中,σ决定了核函数的宽度。在先验概率相同情况下,综合式(5)、式(6)、式(8)、式(9)便可得到基于核函数法位置估计:
3.2 粒子滤波
在煤矿井下为了获得更加精准的目标位置,平滑运动轨迹,采用基于核函数的指纹匹配算法后提出了相应的滤波算法。卡尔曼滤波是线性系统中常用的方法,但在巷道这种多干扰因素的环境中,适用于非线性系统的粒子滤波无疑是更好的选择。粒子滤波[13]是一种数据融合算法,在定位过程中对输入的观测值同系统状态估计值相融合,它通过蒙特卡洛仿真实现递归贝叶斯滤波,关键思想是用一组带有相关权重的随机样本来递归表示所需的后验密度函数,再利用这些样本和其权重计算估计[12]。粒子滤波不再均匀地把样本空间离散化,样本的数量足够大时,根据蒙特卡洛仿真中重要性采样原理,后验密度函数可以由式(12)近似:

式中,X0:k是在k时刻样本集表示系统状态,Z1:k是k时刻观测量集合,N是采样点总数,δ(·)为Dirac函数,wi
k是k时刻第i个采样点的权重,用递推的贝叶斯估计表示为:


利用上式实现权重更新;
(4)归一化权重:

式中,μl服从在[0,1]上的均匀分布,通过上式进行搜索找到m,并对Xmk进行复制;
(6)将上步中结果作为k时刻的最优估计输出,k+1时刻重复以上步骤。
3.3 算法设计
本文提出了在贝叶斯估计框架下基于核函数指纹匹配的位置估计算法与粒子滤波相结合的定位算法。室内定位中,通常训练和测试路线均选在了室内中线上[5],由于模拟井下实验中节点部署与之不同,采集训练点、测试点的路线并不重合,只采用核函数法和粒子滤波会带来纵向较大的误差。本文充分考虑到实际情况中测试与训练路径不相同的情况,为了进一步提高定位精度,引入邻近的K个样本对核函数法进行改进。首先,利用基于贝叶斯估计的核函数法计算并取出概率最大的K个信息;其次,求其对应的样本指纹与在线采集的指纹的欧几里得距离;然后,将该距离作为权重,计算目标位置;最后,将目标位置作为观察值利用粒子滤波算法平滑追踪处理,其算法流程图如图1所示。
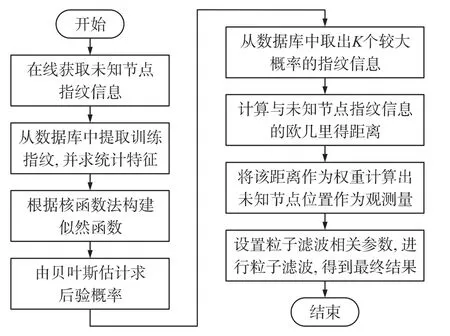
图1 算法流程图
4 算法实现及结果分析
4.1 实验环境设置
在模拟煤矿井下巷道环境进行了实验,选取一段32 m×2.4 m的区域,如图2所示。将定位区域均匀的划分出80个网格,每个网格范围为80 cm×80 cm,其中训练点取在空心点处,考虑到现实中不可能采集到全部位置的指纹信息,故将测试点选在中间实心点处。本实验将人体对射频信号的遮挡造成的信号强度衰减和干扰考虑进去,在采集RSSI指纹信息过程中均将1个测试节点佩戴在人员腰部,区域的两端分别布置了4个信标节点,其射频信号均可覆盖定位区域。
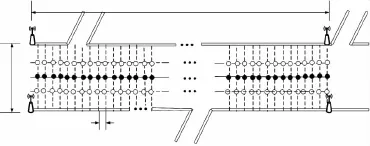
图2 模拟井下实验设置
离线训练阶段,在每个训练点处收集50组数据,其中每组数据包含4个信标节点接收到的RSSI值,并把这些值存入终端数据库中,该表命名为sample,其格式为(id,x_coordinate,y_coordinate,RSSI_1,RSSI_2,RSSI_3,RSSI_4),即 id 序号、横纵坐标、4个RSSI值。在线定位阶段,未知节点发送数据包,信标节点接收到RSSI值后发送到协调器并上传到终端,终端调取数据库开始执行上文所述定位算法,最后通知管理人员未知节点坐标信息,具体流程如图3所示。
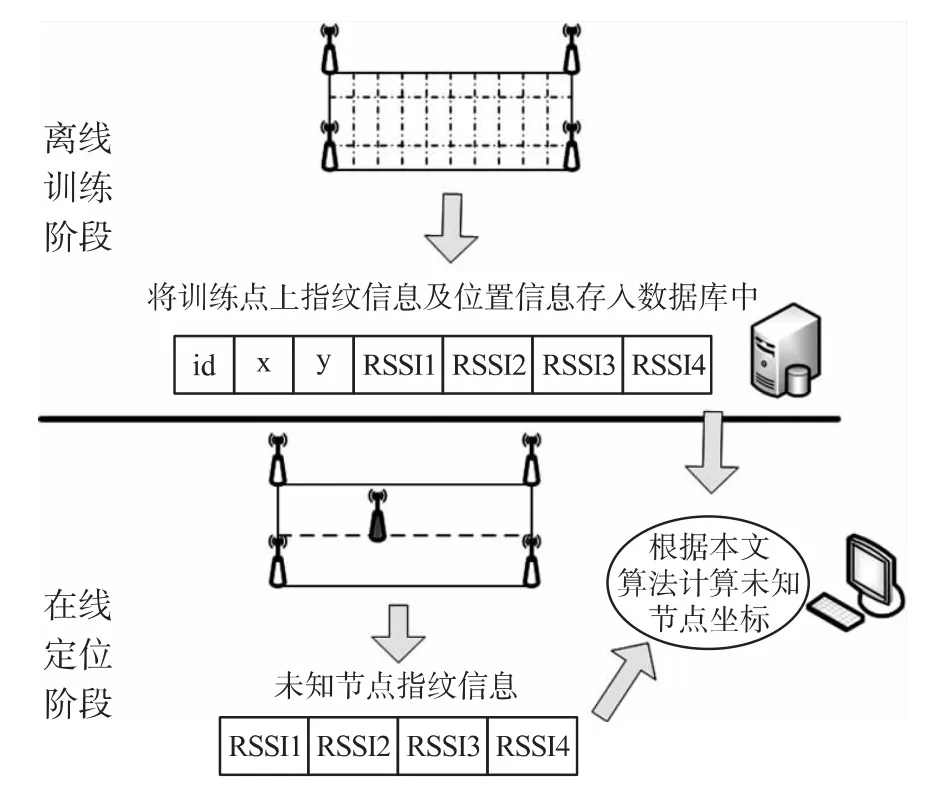
图3 指纹定位系统流程图
4.2 结果与分析
实验中所使用训练数据都是离线训练阶段采集的训练样本,主要从静止目标、动态目标定位两方面讨论。
对静止目标进行定位,选用了确定型定位中NN法、KWNN法和基于贝叶斯估计定位中似然函数采用高斯模型和核函数法的定位算法。假设在下一时刻所在位置与上一时刻位置无关条件下,即基于贝叶斯估计算法的后验概率只依赖似然函数,核函数法中令σ=1。
图4对4种定位算法的误差累计分布进行了对比,核函数法的定位误差明显优于其他算法,最大误差6.2 m,平均误差1.705 m,而采用高斯分布模型的算法不适用于模拟煤矿井下环境,在KWNN算法中,当K=3优于K=4的条件,确定型算法中NN效果最不好,最大误差达到8.8 m。
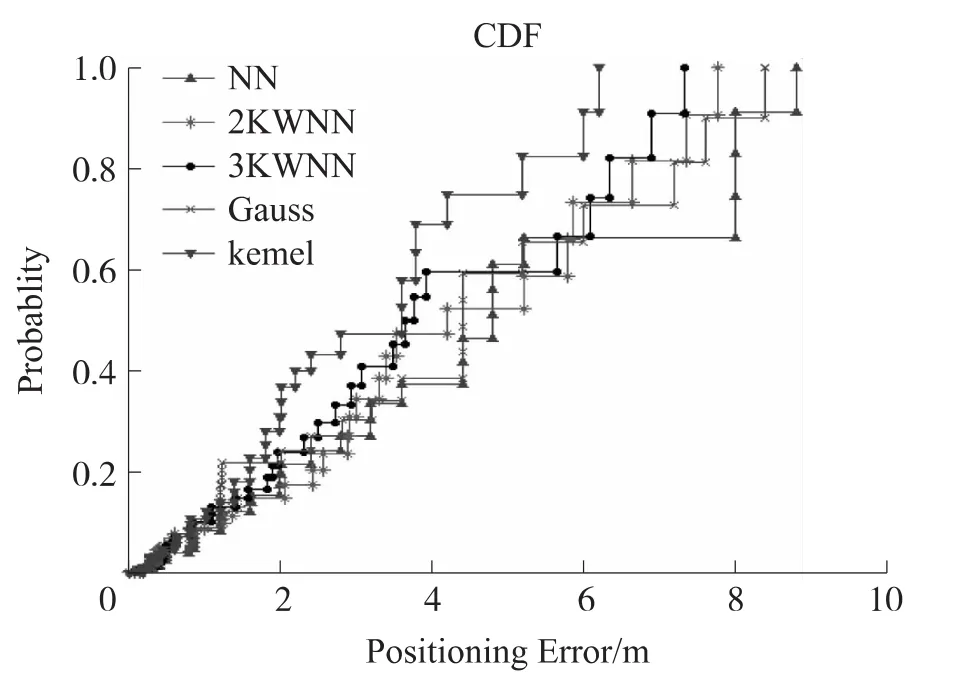
图4 静态目标定位误差累计分布函数
对于动态目标定位,比较了采用基于核函数及Markov转移矩阵的定位算法[2]和本文提出的基于核函数及粒子滤波的定位算法。
由图5可知采用核函数法及粒子滤波的定位算法结果中有90%误差在2 m内,其中对核函数法计算出的结果取2个较大后验概率的位置进行了加权作为观测量。在粒子滤波算法中,进行1 000次蒙特卡洛实验,初值在坐标(0,120)处,以 vx=1.6 m/s,vy=0 m/s向前做直线运动,0.5 s采样一次,横纵轴方向上的测量协方差设为200和40,定位效果如图6所示。
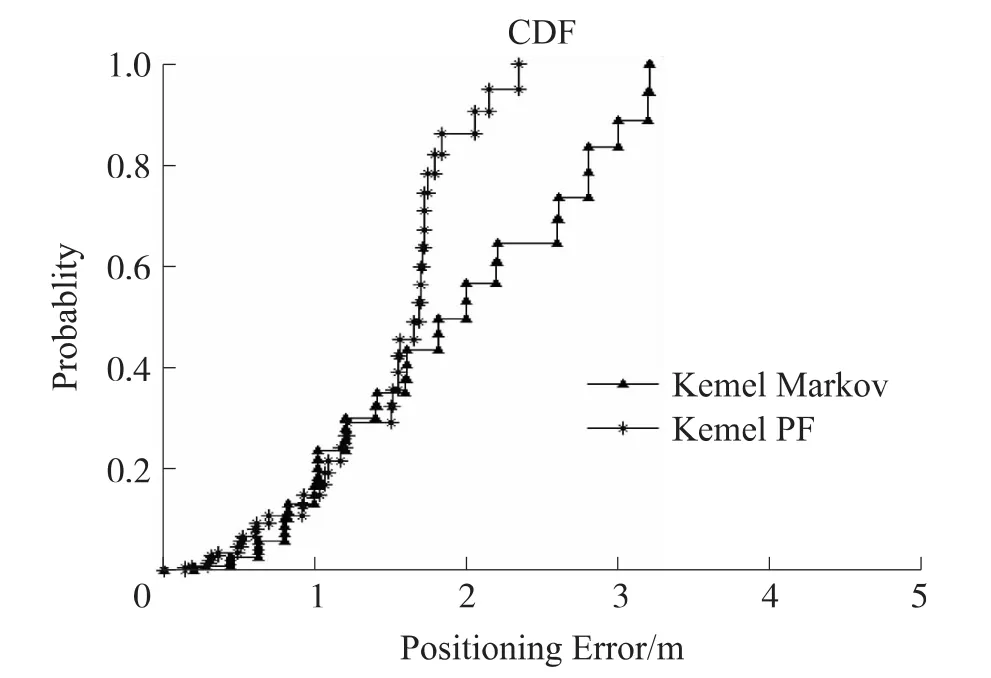
图5 动态目标定位误差的累计分布图
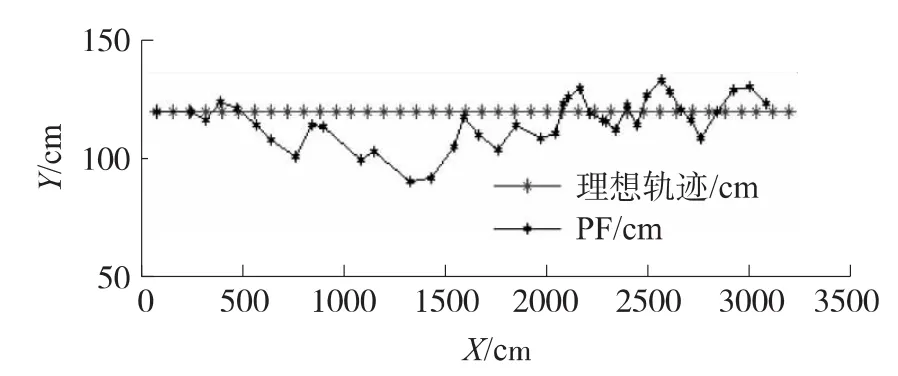
图6 粒子滤波定位结果
5 结论
在煤矿井下环境中,将基于核函数法的匹配算法及粒子滤波相结合应用于无线传感器网络中目标定位,降低了因环境对接收信号强度的影响而造成误差,巷道环境进行实验中将无线传感器节点佩戴在人员腰部,考虑到了人体对信号的遮蔽效应。井下实验结果表明,核函数法定位精度高于确定型指纹匹配算法和基于高斯模型的贝叶斯估计算法,本文提出的粒子滤波算法在动态追踪方面,同基于Markov转移矩阵的算法相比,减少了计算量并且精度有所提高。本文的研究对于煤矿井下定位有一定的理论和指导意义。
[1] 崔丽珍,于洤.基于ZigBee自适应通信在矿井瓦斯监控系统中的设计与实现[J].矿业安全与环保,2012,39(2):19-21.
[2] 赵方,罗海勇,林权,等.基于核函数法及马尔可夫链的节点定位算法[J].通信学报,2010,11:195-204.
[3] Bahl P,Padmanabhan V N.RADAR:An In-Building RF-Based User Location and Tracking System[C]//Proceedings of the Nineteenth Annual Joint Conference of the IEEE Computer and Communications Societies.Piscataway,NJ,USA:IEEE,2000.775-784.
[4] Roos T,Myllymäki P,Tirri H,et al.A Probabilistic Approach to WLAN User Location Estimation[J].International Journal of Wireless Information Networks,2002,9(3):155-164.
[5] Zhang V Y,Wong A K.Kernel Based Particle Filtering for Indoor Tracking in WLANs[J].Journal of Network and Computer Applications,2012,35(6):1807-1817.
[6] 刘晓文,张秀均,郝丽娜,等.基于WI-FI的井下定位算法研究[J].传感技术学报,2012,06:854-858.
[7] 郝丽娜,张秀均,郁万里,等.基于 RSS手指模的煤矿井下WLAN 定位方法[J].传感器与微系统,2012,09:46-49.
[8] Ali S,Nobles P.A Novel Indoor Location Sensing Mechanism for IEEE 802.11 b/g Wireless LAN[C]//Positioning,Navigation and Communication,2007.WPNC’07.4th Workshop on.IEEE,2007:9-15.
[9] Rappaport T S.Wireless Communications Principles and Practice[M].New Jersey:Prentice Hall PTR,2003.
[10]赵方,罗海勇,马严,等.基于公共信标集的高精度射频指纹定位算法[J].计算机研究与发展,2012(2):243-252.
[11]徐勇军.物联网实验教程[M].北京:机械工业出版社,2011.
[12] Arulampalam M S,Maskell S,Gordon N,et al.A Tutorial on Particle Filters forOnlineNonlinear/Non-Gaussian Bayesian Tracking[J].SignalProcessing,IEEE Transactions on,2002,50(2):174-188.
[13]李红春,赵晓光,谭民.无线传感器网络中基于粒子滤波的人员跟踪方法[J].传感技术学报,2012(6):807-814.
[14] 胡士强,敬忠良.粒子滤波算法综述[J].控制与决策,2005(4):361-365,371.
