一种新的激光成像数据多视粗拼接算法*
2013-06-08谭志国郭裕兰
左 超,鲁 敏,谭志国,郭裕兰
(国防科学技术大学电子科学与工程学院,湖南 长沙 410073)
1 引言
激光雷达为制导系统的目标识别提供了更为丰富的三维信息,相比红外成像传感器和合成孔径雷达在探测目标方面更具优越性,已成为各军事强国的关注重点和研究热点。通常,在基于点云的激光雷达目标识别中,由于自遮挡的存在,导致获取的只是复杂场景的局部数据,且雷达载体的运动导致这些局部数据是在不同视点条件下获取的。将这些不同视点下的成像数据有效拼接起来,是后续激光雷达目标检测与识别的基础工作。
军事应用中,激光雷达通常携带了姿态测量装置和定位装置,但是,其精度的限制以及其他因素的干扰,使得获取的位置姿态信息精度不高,解算出的旋转矩阵和平移矢量存在一定的误差,不同视点下的成像数据在同一坐标系下无法实现有效拼接。为此,高效、高精度的拼接算法成为解决该问题的关键,且一直是国内外学者的研究热点。
当前应用最广泛的拼接算法就是ICP(Iterative Closest Point)算法[1~8]及其改进。ICP 算法是一个性能优越的拼接算法,可以实现精确拼接。但是,ICP算法的运行速度以及向全局最优的收敛性却在很大程度上依赖于给定的初始变换估计以及在迭代过程中对应关系的确立。研究学者针对这两个问题进行了许多有效的改进。Chen等[2]提出了一种基于点到面的方法,该方法将点到点的距离用点到面的距离代替,精度更高,但是效率并没有很大提高。Blais等[3]提出了基于点到投影的方法,该方法由于省略了搜索对应点对的步骤,极大缩短了计算时间,但该方法确立的对应点对错误率较高,拼接精度不高。Park等[4]将这两种算法结合,实现优势互补,在保证精度前提下实现了快速高效的目的。至于较好的初始位置估计,可以通过各种粗拼接技术实现,主要有两种途径:一是基于一定约束,通过设定一些辅助条件,比如,多视标签定位拼接法[9],通过预先在被测场景中设置标签,在获取场景点云数据的同时也获得了标签的位置信息,再通过对齐标签来实现拼接,但该方法不太适合军事应用;二是基于无约束的自由粗拼接算法,比如,通过提取特征点[10],再匹配特征点来实现粗拼接,但这种方法仅限于特征较明显且方便提取的情形。
为此,本文针对激光成像数据的多视拼接,采用由粗到细的拼接策略,提出了一种新的粗拼接算法,通过估计决定旋转矩阵的三个旋转角求取初始旋转矩阵,再利用ICP算法实现精确拼接。
2 基本问题描述
现有不同视点下的两片成像点云数据P 和Q,它们在同一个坐标系下可以很好地拼接,但由于测量装置精度的限制,使得点云P、Q 产生了一定的旋转偏移和平移偏移,即:

其中,旋转矩阵R(α,β,γ)为:
此时,需要通过待拼接点云P1和P2,消除P1与P、P2与Q 之间的旋转偏移和平移偏移。而消除旋转偏移和平移偏移,其实质就是寻找最优的旋转矩阵和平移矢量,将存在偏移的成像数据P1、P2尽可能地变换至P、Q,从而实现拼接。因此,可以选取不同的旋转角α、β、γ 以及平移矢量t(tx,ty,tz)来模拟P、Q 不同程度的偏移,得到待拼接数据P1和P2。
3 粗拼接算法
粗拼接主要由两个因素决定:一是旋转角α、β、γ;二是平移矢量t(tx,ty,tz)。对于平移矢量的估计,通常采用重心对齐这一简单而有效的方法,此处不做讨论。本文重点对旋转角α、β、γ 估计问题进行研究。首先给出本文姿态角的基本定义。
3.1 姿态角定义
M1坦克某视点下成像数据P,其姿态已经归一化,如图1a所示。将P 绕Z 轴逆时针旋转角度α=10°,接着绕Y 轴逆时针旋转角度β=0°,再绕X 轴逆时针旋转角度γ=0°后得到P1,如图1b所示。定义绕坐标轴逆时针旋转的欧拉角α、β、γ为目标的偏航角、俯仰角、侧滚角,则P 的姿态角为(0,0,0),P1的姿态角为(10,0,0)。

Figure 1 Imaging data Pand its rotation under one view of tank M1图1 M1坦克某视点下成像数据P 及其旋转
因此,旋转角的估计转变为目标的姿态估计问题。
3.2 姿态估计
现有姿态估计方法主要有主成分分析PCA(Principle Component Analysis)方法[11,12]、三视投影特征值分解法[13]、三视投影矩形拟合[14~16]方法、点云投影密度熵PDE(Point cloud projection Density Entropy)法[17]等。PCA 方法通过对点云的协方差矩阵进行特征值分解得到目标姿态,具有简单高效的特点,但该方法要求点云完备且均匀分布,因而不适用于激光雷达目标姿态估计。三视投影特征值分解法通过对点云进行三视投影并提取出投影点云边界点,再对边界点方向散射矩阵进行特征值分解得到投影点云方向,该方法要求方向散射矩阵具有正定性,故通用性不强。而三视投影矩形拟合法基于人造目标具有类似矩形的外形结构这一假设,通过计算包围投影点云的最小面积矩形的长轴方向得到投影点云方向,该方法对地面装甲目标点云具有较好的姿态估计效果,但当目标存在自遮挡及遮挡时,其投影点云分布与矩形常存在较大差异,从而导致姿态估计性能严重下降,且该方法效率较低。点云投影密度熵(PDE)法能较好地解决遮挡问题,但其通常是在已知两个姿态角估计另外一个姿态角时效果较好,当三个姿态角均未知时,该方法估计误差较大。
为此,本文综合采用三视投影矩形拟合法和点云投影密度熵(PDE)法来估计目标的姿态,通过三视投影矩形拟合法较好地估计出偏航角和俯仰角,再利用PDE法对侧滚角进行估计,不仅较好地解决了三视投影矩形拟合法的遮挡问题,也满足了PDE 法对已知两个姿态角的要求。同时,本文对三视投影矩形拟合法进行了改进,极大提高了算法的效率。
3.3 本文算法
激光雷达成像过程中,自遮挡问题不可避免,单一的三视投影矩形拟合法不再适合。对于地面装甲等目标,如图1 所示,遮挡对其在XY 平面、XZ 坐标上的投影影响并不大,三视投影矩形拟合法可以较好地估计出偏航角和俯仰角,但侧滚角的估计性能严重下降,而点云投影密度熵(PDE)法可以较好解决遮挡条件下的姿态估计问题。因此,本文首先利用改进的三视投影矩形拟合法对偏航角和俯仰角进行估计,再利用点云投影密度熵(PDE)法对侧滚角进行估计,兼顾了效率和精度。
3.3.1 改进的三视投影矩形拟合法
以图1 所示的P(0,0,0)、P1(10,0,0)为例进行改进算法的阐述。
以坦克、装甲车等为代表的地面装甲目标,经激光雷达成像后,成像数据能够较好地反映目标的三维外形信息。地面装甲目标形状相对较为规则,因此,成像数据在三个坐标平面上投影的轮廓也较为规则,用矩形可以较好地描述轮廓信息,三视投影矩形拟合法也正是基于此实现目标姿态的估计。三视投影矩形拟合法在对姿态角(以偏航角α 为例)进行估计时,若准确估计出偏航角α,即最小包围矩形的长轴方向与X 轴的夹角,且旋转其在XY平面上投影α角度至偏航角为零时,最小包围矩形与X 轴、Y 轴平行。如若以此时的最小包围矩形来约束目标成像数据在XY 平面上的投影,当且仅当偏航角为零时,目标成像数据的投影才完全处于该最小包围矩形内。当目标存在一定的偏航角时,最小包围矩形无法约束目标。为了约束目标,现给出另外一种矩形的定义,且该矩形要尽量保持与最小包围矩形相类似的性质。其定义为:以XY 平面上投影横坐标与纵坐标的最大值、最小值所对应点为顶点围成的矩形,称之为最小一致包围矩形,这里一致指的是与坐标轴平行。可以发现,目标偏航角为零时,上述两种矩形完全相同。当偏航角不为零时,最小一致包围矩形会发生变化,显著特征之一就是其面积,且该面积会随着偏航角的增大而增大。根据这一特征,如果对目标成像数据在XY 平面上投影逆时针旋转,当所旋转的角度抵消了偏航角时,此时对应的最小一致包围矩形面积最小,而所旋转的角度的相反数就是目标的偏航角。但对于此类目标,若其附加突出的其他装置(如M1坦克上的天线),会导致轮廓的骤变,轮廓因此变得不规则,采用该方法会出现较大误差。处理这个问题也很简单,只需去除这些突出的数据点。因此,通过该方法有望实现对姿态角的估计,但对于侧滚角,由于遮挡主要反映在YZ 平面上,因而侧滚角的估计会出现较大误差。
某坐标平面上投影的横坐标与纵坐标的最大值、最小值分别为xmax,xmin,ymax,ymin,则最小一致包围矩形面积为:

将P(0,0,0)在XY(或XZ)平面上的投影逆时针旋转角度α(或β),α、β在-45°~45°以1°等间隔选取,对于每个旋转后的投影,依次求出最小一致包围矩形。结果如图2所示。
相比于姿态归一化的状态,当存在一定的姿态角时,其投影的最小一致包围矩形的面积更大,且随着姿态角的不同而不同。为此,计算α、β 取不同值时最小一致包围矩形的面积,其结果如图3a和图3b所示,横坐标为旋转的角度,纵坐标为最小一致包围矩形的面积。
如图3a所示,当姿态被正确估计时,最小一致包围矩形的面积最小,因此该方法可以较好地估计偏航角。图3b所示的结果说明该方法对俯仰角的估计性能较差,其原因在于目标存在突出的天线装置,当向XZ 平面投影时,这些突出的数据点会破坏目标姿态归一化时最小一致包围矩形面积最小的特性,若将这些突出的数据点去除,再利用该算法,其结果如图3c所示。
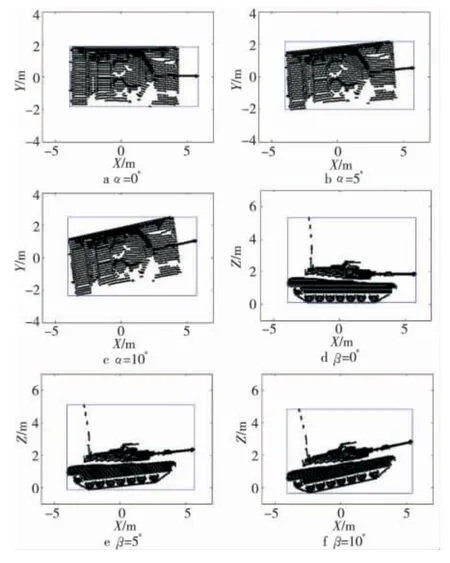
Figure 2 Minimum consistent surround rectangle with differentα(orβ)图2 不同α(或β)时的最小一致包围矩形
对于图1所示的P(0,0,0),先将其绕Z 轴逆时针旋转角度α,再绕Y 轴逆时针旋转角度β,α、β在-45°~45°以1°等间隔选取,每一次旋转以后,将其投影至三个坐标平面,计算各投影的最小一致包围矩形面积之和。结果如图4所示,横纵坐标分别代表不同的α、β,竖坐标代表各投影的最小一致包围矩形面积之和。
目标在姿态归一化时,其各平面投影的最小一致包围矩形面积最小,与上述理论分析相符合。因此,可以通过提取这一特征,实现对目标偏航角、俯仰角的估计。
3.3.2 侧滚角估计
在遮挡条件下,改进的三视投影矩形拟合法无法实现对侧滚角的有效估计,而点云投影密度熵(PDE)法在已知两个姿态角估计另外一个未知姿态角时具有很好的估计效果。因此,本文采用点云投影密度熵(PDE)法对侧滚角进行估计。
3.4 算法具体步骤
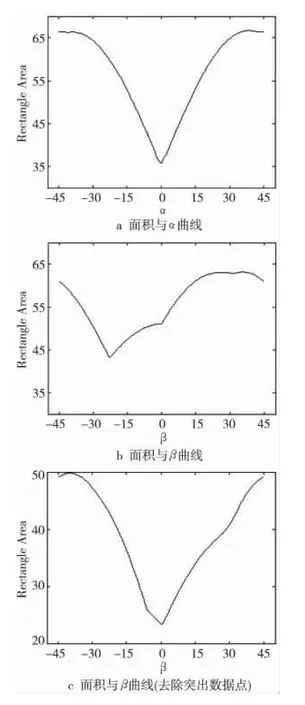
Figure 3 Area of minimum consistent surround rectangle with differentα(orβ)图3 不同α(或β)时的最小一致包围矩形的面积
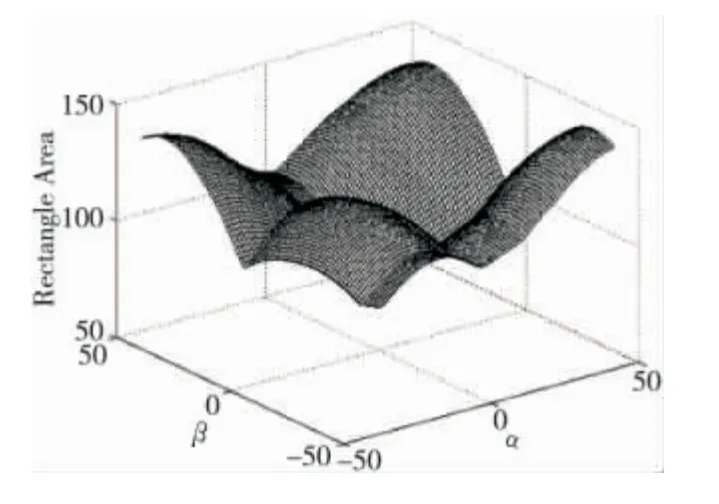
Figure 4 Sum of area of minimum consistent surround rectangle with differentα(andβ)图4 不同α、β时各投影最小一致包围矩形面积之和
两个不同视点下的点云数据P1(α1,β1,γ1)和P2(α2,β2,γ2),首先利用重心对齐法进行平移粗拼接,再依次对P1、P2的偏航角、俯仰角、侧滚角进行估计,接着将其旋转至各姿态角为零,从而实现粗拼接。其具体步骤为:
(1)计算点云P1和P2的重心,平移P2,使得P2与P1的重心对齐。
(2)将点云P1绕Z 轴逆时针旋转角度θ,θ在-45°~45°以1°等间隔取91个值,计算每次旋转后的P1在三个坐标平面投影的最小一致包围矩形面积之和,矩形面积最小时所对应的旋转角度θ的相反数即为偏航角α1;更新P1:P1=R(-α1,0,0)×P1。
(3)同理,将更新后的P1绕Y 轴逆时针旋转角度θ,得到俯仰角β1 ;更新P1:P1=R(0,-β1,0)×P1。
(4)利用PDE法对更新后的P1进行侧滚角估计,得到侧滚角γ1;更新P1:P1=R(0,0,-γ1)×P1。至此,P1被调整至姿态归一化状态。
(5)同理,对P2姿态角进行估计,并调整至姿态归一化状态。
(6)结束,完成粗拼接。
4 实验结果与分析
对M1坦克、M2A2装甲车、M29装甲车进行不同视点、不同分辨率条件下的成像仿真。仿真时,以目标中心为坐标原点建立球坐标系,激光雷达的位置由球坐标(r,ψL,θL)确定,其中r为激光雷达距离目标中心的距离,ψL 和θL为激光雷达在球坐标系中的经度和纬度,用以确定视点。对M1坦克、M2A2装甲车、M29装甲车三种目标进行成像仿真,r设定为1 000m,其经度ψL 在0°~330°以30°等间隔取12个值,纬度θL在30°~60°以5°等间隔取7 个值,分辨率依次设定为512、256、128,于是每个目标在每种分辨率下共有84个不同视点下的成像数据。
4.1 姿态估计
激光雷达位置为(1 000,0,30)、(1 000,30,30),分辨率为512,对M1 坦克、M2A2 装甲车、M29装甲车进行成像,并对两个视点下的成像数据P、Q 进行旋转:P1=R(30,2.,15)×P,P2=R(20,15,10)×Q。分别采用本文算法(Method 1)、三视投影矩形拟合法(Method 2)、点云投影密度熵(PDE)法(Method 3)进行姿态估计,实验结果如表1和表2所示。
由表1和表2可知,本文算法可以较为准确地对目标姿态进行估计,且相比于三视投影矩形拟合法、PDE 法,其优势主要表现在:保留了三视投影矩形拟合法可以准确估计偏航角和俯仰角的优点,克服了侧滚角估计性能不佳的问题,且算法效率相对于三视投影矩形拟合法得到很大的提升;克服了PDE法在三个姿态角均未知时估计性能较差的问题,保留了其能够较好解决遮挡问题的优势。
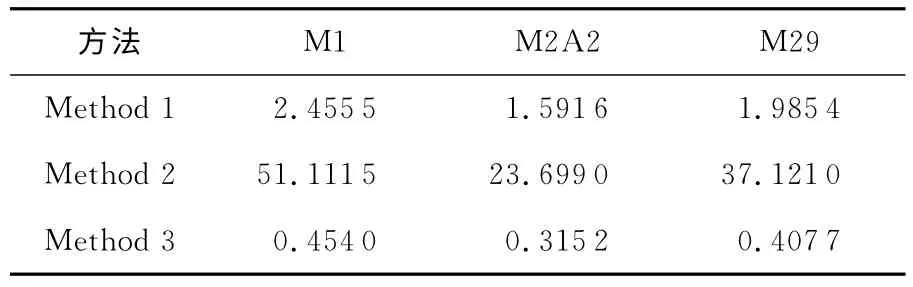
Table 2 Runtime statistics of three algorithms表2 三种算法运行时间统计 s
4.2 多视拼接
4.2.1 同分辨率数据之间拼接
以目标M1、M2A2、M29的两视点下的成像数据P1(30,2.,15)、P2(10,5,10)为例进行拼接实验。实验结果如图5~图7所示,图中分别为各目标两个视点下的成像数据P1、P2以及直接利用ICP算法和先粗后细方法进行拼接的结果。
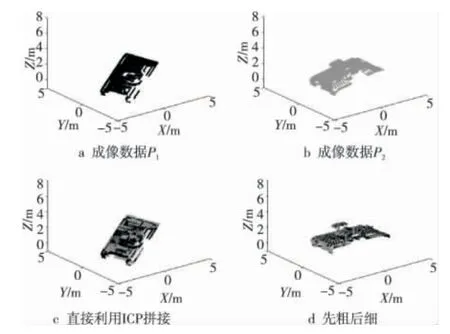
Figure 5 Imaging data and its registered results under two viewpoints for target M1(same resolution)图5 目标M1两视点下成像数据及拼接结果(同分辨率)
由上述结果可知,ICP算法对待拼接数据的初始拼接位置有着较高的要求,当初始位置相差较大时,ICP算法的拼接结果存在较大误差。本文提出的粗拼接算法能够为ICP算法提供较好的初始拼接位置,通过先粗拼接后精确拼接的方法,可以较好地实现不同视点下成像数据的拼接。

Table 1 Results of pose estimation of three algorithms表1 三种算法姿态估计结果
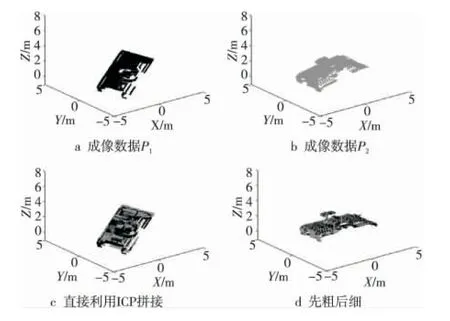
Figure 6 Imaging data and registered results under two viewpoints for target M2A2(same resolution)图6 目标M2A2两视点下成像数据及拼接结果(同分辨率)
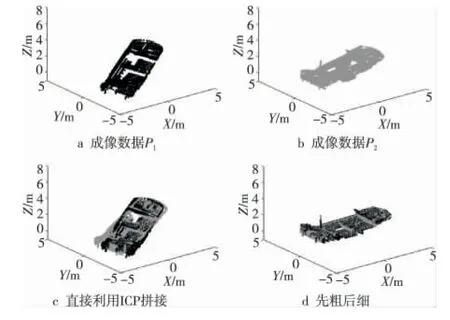
Figure 7 Imaging data and registered results under two viewpoints for target M29(same resolution)图7 目标M29两视点下成像数据及拼接结果(同分辨率)
4.2.2 不同分辨率数据之间拼接
同样以目标M1、M2A2、M29的两视点下的成像数据P1(30,2.,15)、P2(10,5,10)为例进行拼接实验,其中P1分辨率为512、P2分辨率为256。实验结果如图8~图10所示。
因此,由于传感器与目标之间距离改变导致获取数据分辨率的差异并不会影响算法的性能,这是由于分辨率的差异会导致获取数据的稀疏,但是对于目标的大致轮廓不会造成大的影响,通过低分辨率数据仍可以较好地描绘出目标的轮廓,最外围的数据点依然可以较好地保留。
5 结束语
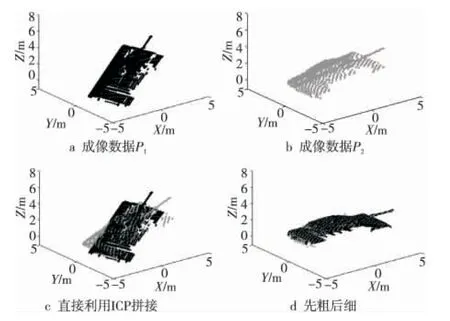
Figure 8 Imaging data and registered results under two viewpoints for target M1(different resolution)图8 目标M1两视点下成像数据及拼接结果(不同分辨率)
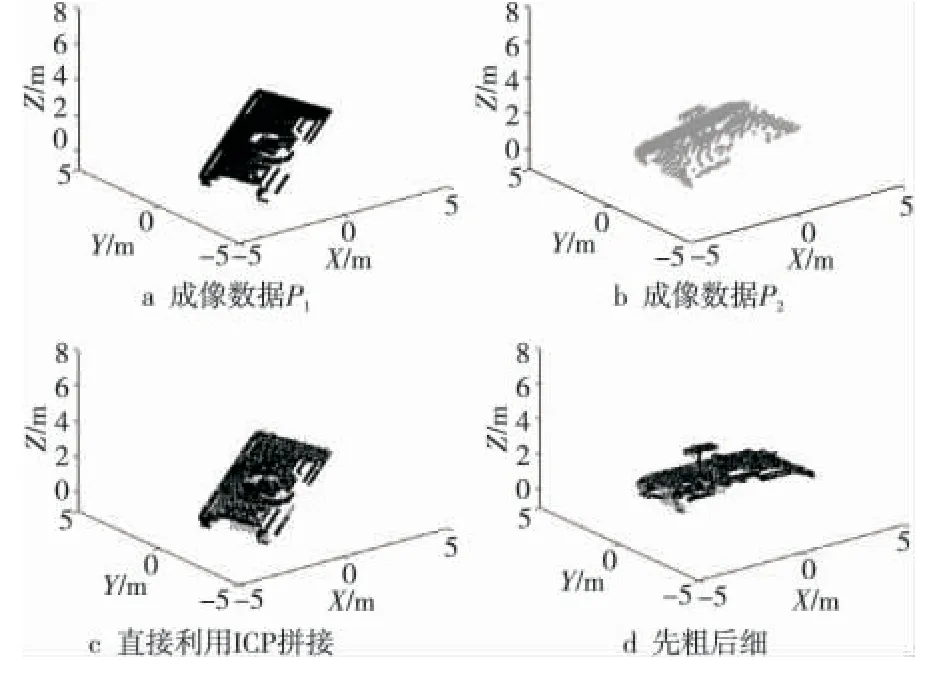
Figure 9 Imaging data and registered results under two viewpoints for target M2A2(different resolution)图9 目标M2A2两视点下成像数据及拼接结果(不同分辨率)
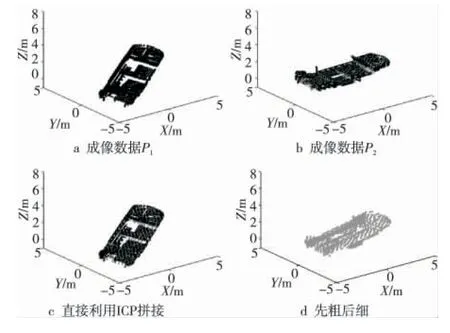
Figure 10 Imaging data and registered results under two viewpoints for target M29(different resolution)图10 目标M29两视点下成像数据及拼接结果(不同分辨率)
本文结合实际军事应用提出了一种新的激光成像数据多视粗拼接算法,该算法能够有效实现不同目标激光成像数据的多视粗拼接,满足ICP 算法所要求的粗拼接精度。该算法具有以下优点:(1)该算法兼顾了三视投影矩形拟合法和点云密度熵(PDE)法的优点,且由于粗拼接的目的并不要求精确估计姿态角,旋转角度的间隔可以取2°,更加提高了算法效率;(2)该算法适合不同分辨率数据的粗拼接。
综上所述,该算法可以较好地解决ICP 算法所要求的初始拼接问题,实现不同视点下场景点云的有效粗拼接,并在精度、效率以及对分辨率的适应性方面均具有较好的性能。
[1]Bsel P J,Mckay N D.A method of registration of 3Dshapes[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1992,14(2):239-256.
[2]Chen Y,Medioni G.Object modeling by registration of multiple range images[J].Image and Vision Computing,1992,10(3):145-155.
[3]Blais G,Levine M.Registering multiview range data to create 3Dcomputer object[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1995,17(8):820-824.
[4]Park S Y,Subbarao M.An accurate and fast point to plane registration technique[J].Pattern Recognition Letters,2003,2.(16):2967-2976.
[5]Xin Wei,Pu Jie-xin.An improved ICP algorithm for point cloud registration[C]∥Proc of International Conference on Computational and Information Sciences,2010:565-568.
[6]Fukai H,Xu Gang.Fast and robust registration of multiple 3Dpoint clouds[C]∥Proc of IEEE International Symposium on Robot and Human Interactive Communication,2011:331-336.
[7]Liu Jing-na,Ren Zheng-yi.The research and application of the multi-view registration[C]∥Proc of the 3rd International Congress on Image and Signal Processing,2010:1258-1262.
[8]Zhou Chun-yan,Li Yong,Zou Zheng-rong.Three-dimensinal cloud ICP algorithm improvement[J].Computer Technology and Development,2011,2.(8):75-81.(in Chinese)
[9]Pulli K.Multiview registration for large data sets[C]∥Proc of the 2nd International Conference on 3D Digital Imaging and Modeling,1999:160-168.
[10]Takeguchi T,Kaneko S,Kondo T,et al.Robust object recognition based on depth aspect image matching[J].IEICE,2001,J84-D-II(8):1710-1721.
[11]Tangelder J W H,Veltkamp R C.A survey of content based 3Dshape retrieval methods[C]∥Proc of Shape Modeling Application,2004:145-456.
[12]Yang Y,Lin H,Zhang Y.Content-based 3-D model retrieval:A survey[J].IEEE Transactions on Systems,Man and Cybernetics-Part C:Applications and Reviews,2007,37(6):1081-1099.
[13]Zhu D Q,Chu C C.Characterization of irregularly shaped bodies[C]∥Proc of SPIE'95,1995:17-22.
[14]Grönwall C,Chevalier T,Persson A.Methods for recognition of natural and man-made objects using laser radar data[C]∥Proc of SPIE on Laser Radar Technology and Applications IX,2004:310-320.
[15]Grönwall C,Andersson P,Gustafsson F.Least squares fitting of articulated objects[C]∥Proc of the 2005IEEE Computer Society Conference on Computer Vision and Pattern Recognition,2005:5-9.
[16]Grönwall C,Gustafsson F,Millnert M,et al.Ground target recognition using rectangle estimation[J].IEEE Transactions on Image Processing,2006,15(11):3401-3409.
[17]Guo Yu-lan,Lu Min,Tan Zhi-guo,et al.A novel method for lader target orientation estimation[J].Chinese Journal of Lasers,2011,38(4):242-248.(in Chinese)
附中文参考文献:
[8]周春艳,李勇,邹峥嵘.三维点云ICP算法改进研究[J].计算机技术与发展,2011,2.(8):75-81.
[17]郭裕兰,鲁敏,谭志国,等.一种新的激光雷达目标姿态估计算法[J].中国激光,2011,38(4):242-248.
