一种无刷直流电机的控制技术
2013-06-08童正军
童正军,高 嵬
(1. 海军驻北京8359所军事代表室,北京 100048;2. 海军工程大学,武汉 430033)
0 引言
本文利用插入式重复控制方法来抑制电机电磁波动力矩,通过对无刷直流电动机系统波动力矩数学模型的分析,得出波动力矩产生的机理及其特点;根据对波动力矩的分析设计了插入式重复控制器,并对控制器进行了仿真验证,仿真结果显示基于该控制器的无刷直流电机系统对波动力矩的抑制效果很好,直流电机调控性好、运行平稳。
1 直流无刷电动机系统波动力矩机理分析
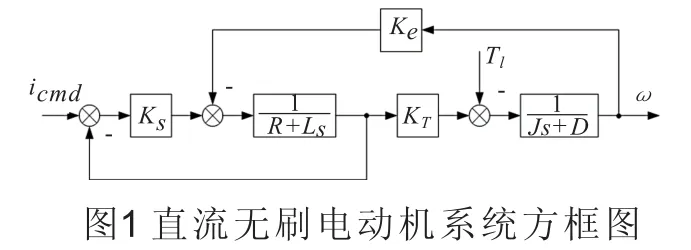
直流无刷电动机系统方框图如图 1所示,其中Ks为等效逆变器增益,KT为电机力矩系数,Ke为电机反电势系数,Tl为负载转矩。由图1 可得无刷直流电动机系统的传递函数为:

对于无刷直流电动机系统,三相反电势和相电流可分别表示为:
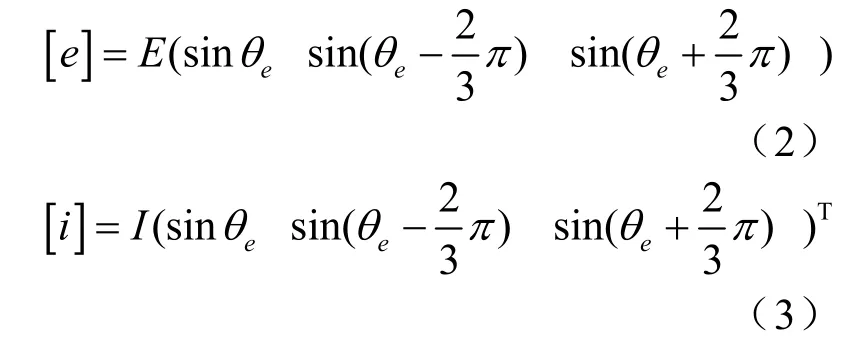
其中:E=KePω—反电势幅值,I—相电流幅值,θe—转子电角度。
电磁转矩为:

在dq坐标系下无刷直流电机系统的输出电磁力矩为:

其中:Te--电机电磁力矩,φd--表示直轴磁通,φq--表示交轴磁通,id--表示直轴电流,iq--表示交轴电流。由于电势或电流都会存在幅值偏差、相位偏差、谐波成分等偏差,考虑造成波动力矩的各种因素,电机的输出电磁力矩为:

式中,△ke气隙磁场偏差造成的力矩系数偏差相对值,△iq为定子电流偏差造成的交轴电流偏差相对值。由(6)式推导化简可得:

Tr为波动力矩。
2 重复控制器的设计与稳定性分析
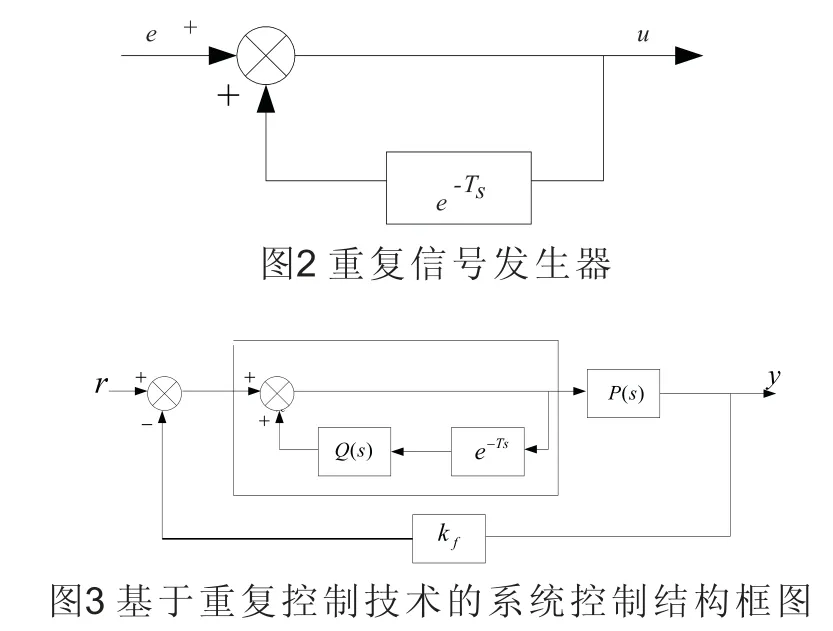
基本重复控制是基于内模原理的一种控制思想,它的创新之处在于成功构造出周期为T的任意周期信号内模,即重复信号发生器,结构为一周期延迟正反馈环节,如图2所示。本文改进的重复控制技术控制结构框图如图3所示,其中P(s)是被控对象,kf为反馈系数,虚线框内是重复控制器。通过对图3控制系统通过图4的结构图变换方法,得到了系统的稳定性设计准则。变换过程如图4所示。
由图4(c)可知,系统稳定的充分必要条件是开环增益小于1,由此得到结论:



式(10)即重复控制系统的稳定性条件,与文献[1]的结论完全一致。式(10)是系统稳定性设计的重要依据。
3 系统稳定性设计
实际的重复控制系统都引入一个校正环节Q(s),使之在满足式(10)的情况下,系统稳定,Q(s)一般是选择低通滤波器[4]。被控对象P(s)为二阶环节,考虑最恶劣情况,即P(s)无阻尼,电机空载,Tl=0时,若式(10)仍成立,则系统稳定。运用最小二乘法拟合实测数据可得被控对象的传递函数:

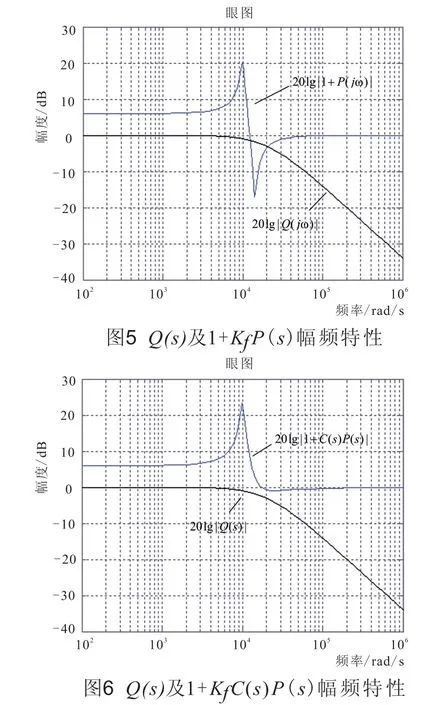
考虑系统工作带宽、波形跟踪性能等因素,选择Q(s)=K/(1+Ts)的的参数:K=1,T= 5× 10-5s,绘1+kfP(s)、Q(s)的伯特图如图5所示,系统不稳定。若通过降低Q(s)的带宽使式(11)得到满足,将牺牲系统的动态性能,可考虑对P(s)做串联补偿[2],形式为


此时由图6幅频特性可见,对控制对象进行超前校正环节补偿后,可以满足系统稳定性要求。
4 仿真验证和结果分析
在上述理论分析的基础上,通过Matlab仿真软件进行了建模仿真,以一台10 kW无刷直流电机为仿真对象,采用双环控制结构,其中外环为速度环,内环为电流环;电流环采用重复控制器进行调节,转速参考为700转/秒。由图8、9可知,在负载转矩波动较大的情况下,系统通过调节无刷电机三相定子电流使得转速能够很快的稳定在预期转速。由图8同时可得,在负载起始转矩较大的情况下,系统能够很快的启动并达到稳定,说明该调节方案具有良好的动态特性。

5 结论
本文基于对重复控制原理和稳定性分析的基础上,根据无刷直流电机的调控目标和调控特性,设计了改进型重复控制器。并运用软件进行了仿真,仿真结果证明该方案具有良好的调节特性和动态特性,满足系统对速度精度和速度平稳性的要求。
[1] P.Pillay, R.Krishman. Application characteristics of permanent magnet synchro- nous and brushless DC motors for servo drives. IAS Annual Meeting, IEEE,Atlanta, 1987:380-390.
[2] F.Parasiliti, R.Petrella and M. Tursini. Torque ripple compensation in permanent magnet synchronous motors based on Kalman Filter. IEEE, 1999.
