永磁同步直线电机伺服系统负载扰动建模与抑制*
2013-05-28甄文喜戴跃洪唐传胜
甄文喜,戴跃洪,唐传胜
(电子科技大学机械电子工程学院,成都 611731)
0 引言
直线电机具有高速、高精、高推力密度以及较低的能量损耗等优点,被广泛应用在高精、高速、高效的伺服控制系统中,比如数控机床、机器人、无人机、医疗器械等领域[1-2]。但由于直线电机伺服系统没有任何中间传动机构,即所谓“零传动”,那么负载侧的任何变化都直接作用到直线伺服电机上,这种变化包括加工过程中负载工作台负荷变化、直线电机的端部效应、齿槽效应和永磁体磁链谐波引起的推力波动、电机参数摄动等。这种干扰没有经过任何缓冲或衰减就直接作用于直线伺服电机上,这样对直线电机伺服控制系统的性能造成很大的影响。
为了抑制扰动,提高伺服控制系统性能,文献[3-5]设计了一种能够抑制直线电机参数摄动、摩擦力、纹波推力以及外力扰动的观测器,其能很好的补偿扰动,而且设有低通滤波器LPF,克服了由静摩擦力引起的高频扰动信号的影响。但这种方法在扰动抑制方面发挥了积极作用却没能提高伺服控制系统的响应速率。同时,为了提高速度环的控制精度,文献[6]采用模糊控制与PI控制相结合的控制方式,能有效的降低跟踪误差,实现高精度的运动控制,但是这种算法冗长、运算量大,增加了系统的时间开销,对于高响应的直线电机伺服控制系统而言并不是最佳选择。
本文以普什宁江机床有限公司THS6350机床X轴的永磁同步直线伺服电机为研究对象,在建立永磁同步直线电机伺服控制系统扰动模型的基础上,构建了一种改进型的补偿器,利用在线扰动观测与补偿器来实时估计源于摩擦力、纹波推力等扰动并进行实时补偿,并通过设置电流增益来改善扰动补偿器的动态性能,减少系统的响应时间。速度环采用PI与重复控制相结合的复合控制方式,实现速度的精准控制。
1 直线电机伺服系统负载扰动模型
直线电机伺服控制系统是一个非线性、多变量、强耦合的系统,其所受的扰动源于摩擦力,纹波推力以及电磁谐波,电机参数摄动等。为了简化设计,本文参考文献[6]中的动力学模型,并且结合直线电机伺服控制系统的扰动源,推导出其动力学方程为:

式中:Fe为电磁推力,m为动子及工作台的质量,x为直线电机位置,B为粘滞摩擦系数,FL为负载力,Fd为负载扰动。
由于直线电机的电磁推力为:

且本文采用电流id=0的转子磁场定向控制策略,所以:
对于直线电机来说,所受的扰动主要来源于负载力、摩擦力和纹波推力,但是对于直线电机伺服控制系统而言,负载扰动主要来源是与速度有关的摩擦力Ff和与位置有关的纹波推力Fr,即:

下面具体分析其扰动并建立相应的数学模型。
1.1 摩擦力模型
摩擦力包括滑动摩擦力fh和静摩擦力fs,由于其模型很难用数学模型精确描述,所以本文采用简化的数学模型,可表示为:

式中:˙x为直线电机速度,˙xs为Stribeck速度参数。
1.2 纹波推力模型
纹波推力主要是齿槽和端部效应引起的气隙磁场密度不均匀、不对称而造成的推力波动,其用数学模型可简化表示为:

式中:Arn为纹波推力幅值,ff为基频,θn为初始相位角,N为谐波序列。
根据式(1)~(6),可推导出直线电机伺服系统的负载扰动模型为:

图1 直线电机伺服系统负载扰动数学模型
2 扰动抑制
2.1 在线扰动补偿器设计
由上述建立的直线电机伺服控制系统扰动模型可知:

式中:m为直线电机动子和工作台的质量,Δm为质量误差,ΔKf为推力系数误差为质量估计值为推力系数估计值。现设总扰动补偿力为Fcom,则由式(7)可得:

因此在线观测器和补偿器的数学型为:
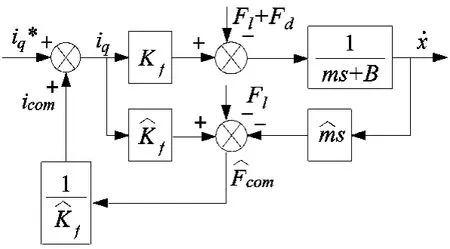
图2 扰动观测器与补偿器数学模型
为了提高响应速率以及抑制静摩擦力的影响,本文在参考文献[7-8]的基础上,设计了一种改进型的模型。该模型除设置用于抑制中高频噪音的低通滤波器F(s)外,还增设了用于提高系统响应速率的电流增益Ki。这里采用三阶低通滤波器,其传递函数为:

式中:σ为观测器时间常数。则,改进的扰动观测器与补偿器数学模型如图3所示。

图3 改进的扰动观测器与补偿器数学模型
2.2 速度环控制器设计
本文在参考文献[9-10]的基础上,采用常规的PI控制与重复控制相结合的方式,即利用PI控制具有良好的动态性能和重复控制具有良好的静态性能这一特性,实现对速度的精准控制,其数学模型如图4所示。
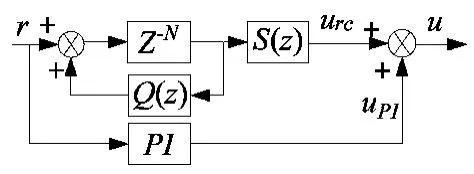
图4 PI-重复控制器数学模型
由图4可知,重复控制器的传递函数为:

式中:N为一个周期的采样总数,Q(z)为滤波器,S(z)为补偿器,用于抑制谐波峰值,以达到提高系统稳定性和抗高频信号扰动目的。则整个直线电机伺服控制系统数学模型如图5所示。
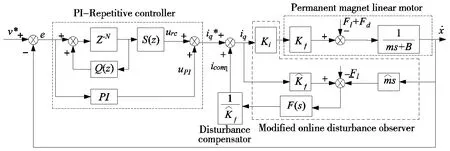
图5 直线电机伺服控制系统数学模型
3 仿真结果与分析
本文以普什宁江机床有限公司THS6350机床X轴的直线伺服电机为研究对象,对所建立的伺服控制系统进行仿真实验,直线电机试验台如图6所示。直线伺服电机是采用SIEMENS的直线电机,相关参数如表1所示。

图6 直线电机试验台

表1 直线电机参数
为了分析与验证本文所设计的带有干扰抑制的直线电机伺服控制系统的控制性能,对所设计的抗负载扰动系统进行了仿真。在仿真中,选取观测器的采样时间 σ 为0.001s,电流增 Ki益为30,Q(z)为0.9,负载力FL为300N。模拟实际直线电机伺服控制系统的负载扰动,分两种情况仿真分析。
情况一:加入幅值为49N的周期性干扰力,给定速度在0s~0.1s为0.5m/s,在0.1s~0.2s为1m/s;图7分别显示了在给定速度变化时,PI控制与原始扰动补偿模型、复合控制与改进扰动补偿模型的速度响应曲线。
情况二:加入幅值为49N的周期性干扰力,给定速度为1m/s,在仿真进行0.1s时,突加瞬时干扰力。图8分别显示了在突加瞬时扰动时,PI控制与原始扰动补偿模型、复合控制与改进扰动补偿模型的速度响应曲线。
在上述两种情况仿真结果中,图7显示了在输入变化的情况下,改进型的扰动补偿器能够明显提高系统响应速度;与此同时,图8显示了采用复合控制与改进扰动补偿器相结合,明显降低了控制系统的超调量、稳态误差以及线性误差,并且系统恢复时间也明显减小。因此,该扰动抑制方法不仅提高了系统的动、静态性能,而且使直线电机伺服系统的控制精度和鲁棒性能得到了很大的改进。
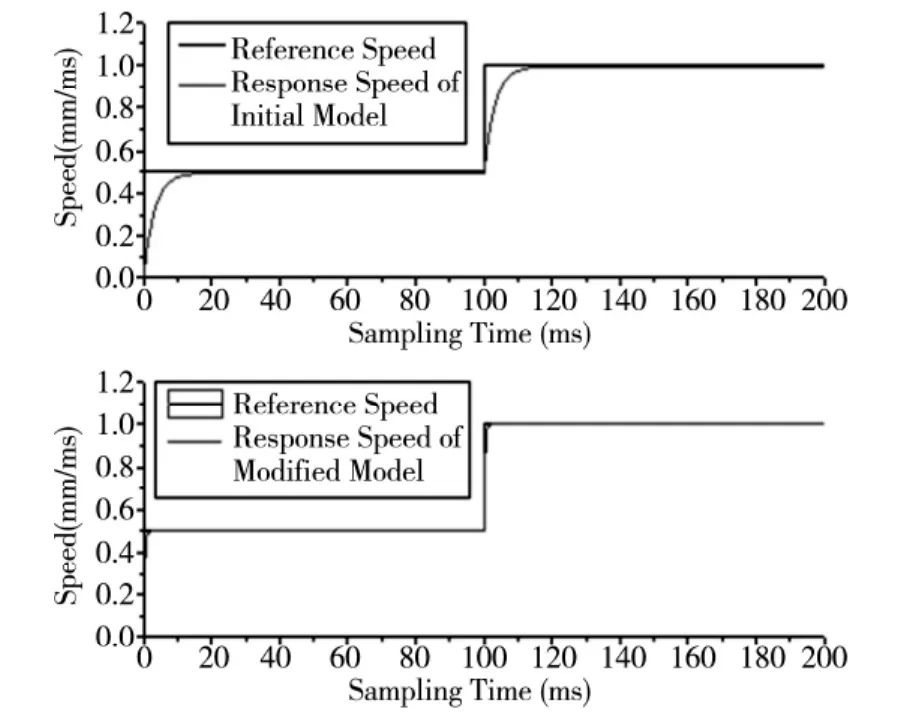
图7 给定速度变化时的速度响应曲线
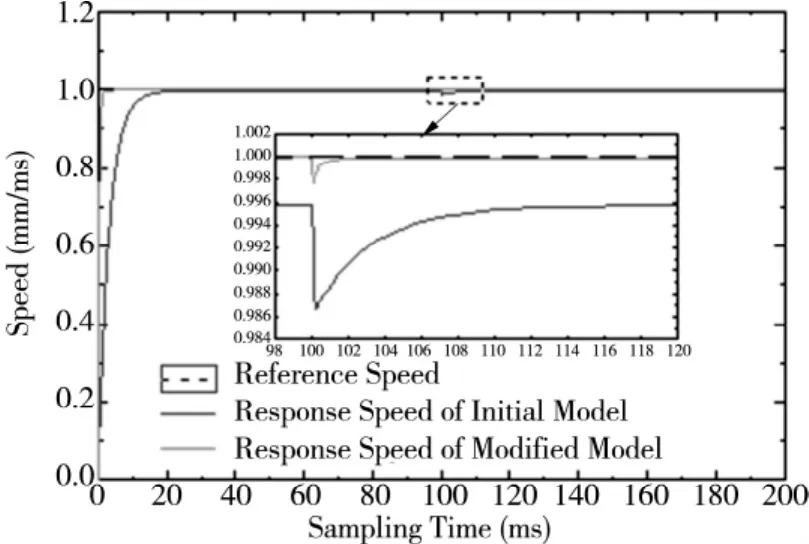
图8 突加瞬时负载扰动时的速度响应曲线
4 结论
本文在建立永磁同步直线电机伺服系统负载扰动模型的基础上,提出了一种改进型的扰动补偿器与复合控制器相结合的扰动抑制方法。该方法采用在线扰动观测与补偿器,能够实时估计源于摩擦力、纹波推力等扰动并进行实时补偿。而且,通过设置电流增益可以改善扰动补偿器的动态性能。速度环采用PI与重复控制相结合的复合控制方式,可以实现速度的精准控制。仿真结果显示,本文设计的基于扰动补偿器与复合控制器相结合的扰动抑制方法有效地抑制了负载扰动,减小了系统的响应时间,并且明显提高了系统的控制精度和鲁棒性。
[1]殷战稳,司纪凯.永磁直线同步电机应用现状综述[J].微电机,2012,45(1):76 -80.
[2]王守雨.直线电机推力分析与隔磁防护技术研究[D].成都:电子科技大学,2012.
[3]S.Komada,M.Ishidar,K.Ohnishi,T.Hori,Disturbance observer-based motion control of direct drive motors[J].IEEE Transactions on Energy Conversion,1991,6(3):553-559.
[4]张代林,陈幼平,艾武,等.基于观测器模型的直线电机干扰抑制技术的研究[J].中国电子工程学报,2007,27(12):14-18.
[5]Yu-wu Zhu,Yun-Hyun Cho,Thrust Ripples Suppression of Permanent Magnet Linear Synchronous Motor[J].IEEE Trans.On Magnetics,2007,43(6):2537 -2538.
[6]Lu Xiuhe,Wu Ke,Guo Min,The Permanent Magnet Linear Synchronous Motor Distribution System Based on Fuzzy PID Control[C].4th International Conference on Intelligent Computation Technology and Automation.Shenzhen,China,2011:542-545.
[7]Kyoung-Chon Kim,Young-Man Choi,Jung-jae Kim etal,Development of Control Algorithm to Reduce Force Ripple for High Speed Permanent Magnet Linear Motor(PMLM)[C].International Conference on Control,Automation and Systems,in COEX,Seoul,Korea,2007,pp.1712 -1716.
[8]孙宜标,王桂宏,郭庆鼎,等.永磁直线电机伺服系统模型参考离散滑模控制[J].沈阳工业大学报,2007,29(5):538-541.
[9]储剑波,胡育文,黄文新,等.一种抑制永磁同步电机转速脉动的方法[J].电工技术学报,2009,24(12):43-49.
[10]M.Tomizuka,T.C.Tsao,and K.K.Chew,Discretetime domain analysis and synthesis of repetitive controller[C].in Amer.Contr.Conf.Rec.,1988:860 -866.