新型同步箝位控制压电马达
2013-05-24贺良国刘永斌张连生潘巧生
贺良国,刘永斌,张 祺,张连生,潘巧生
压电马达一般具有结构简单多样、可控性好、可以输出微位移、低速大扭矩、响应快、无电磁和噪声干扰、不存在过载过压自毁现象、断电可自锁、可在真空低温等极端环境下工作等优点[1-2],受到现代工业以及国内外专家的广泛关注,并且被广泛的应用于航天器、机器人、照相机以及医疗设备等领域[3-4]。
根据定子和转子的工作方式,压电马达可分为两种[5]。一种是工作频率相对较低的准静态马达,如尺蠖马达[6-7]和惯性冲击马达[8-9]等;另一种是工作频率相对较高的超声马达,如驻波马达[10-11]和行波马达[12-13]等。尺蠖马达在输出力以及效率方面比较有优势,但由于准静态下的工作频率较低,从而输出速度相对较低,如Frank等[6]设计的直线尺蠖马达,输出力高达150 N,但是工作频率低于150 Hz,使得输出速度最大只有1mm/s。惯性冲击马达相对于其他类型的马达在结构、操作以及步进特性等方面具有优势,但由于惯性冲击马达存在冲击和滑动摩擦,该类型马达的输出力以及效率相对较低,如Zhang等[14]设计的惯性冲击马达,输出力矩0.1 mN m,效率最大仅为0.1%。超声马达的主要优势是速度相对较高,如Watson等[13]设计的旋转超声马达转速高达1 295 r/min,但是输出力矩仅有13 nN m。摩擦耦合共振驱动型压电马达,较高的驱动频率使压电马达能够获得较高的速度,但是连续摩擦造成的热耗散以及磨损使马达的效率不高[14],同时也会影响马达的使用寿命[15]。
由上述分析,要使压电马达在力、速度、效率以及使用寿命方面得到提高,须满足下面两个基本条件:
(1)压电马达定子工作在共振状态下;
(2)能量转换和传输过程中,避免出现滑动摩擦。
本文首先针对上述第一点,利用超声马达的共振驱动方式使马达工作在共振状态下;其次针对第二点,利用尺蠖马达的控制方式使能量转换和传输过程中不出现滑动摩擦;最后参照电学原件可控硅及其在直流马达中的应用,从电学参数电压、电流到机械参数力、速度,设计了一种新型压电马达——谐振驱动同步箝位控制压电马达。
1 结构和原理
1.1 结构组成
图1(a)所示为同步箝位控制压电马达的三维模型。马达主要由振子、箝位开关、输出轴和辅助结构等组成。振子由悬臂梁1和压电陶瓷片2构成;箝位开关由压电陶瓷片3和卡环4构成。辅助结构包括导引结构、预紧力结构及底座11。导引结构由直线轴承6和直线导引12构成;预紧力结构由柔性铰链8(方形槽7以及U-型槽9形成柔性铰链)和预紧螺钉10构成。卡环一端开口以减小其刚度保持其几何精度,相对于开口端180°位置与底部粘结以提高整个箝位开关的刚度。调节预紧螺钉改变卡环4和光轴5之间的间隙及预紧力,克服箝位开关的制造误差,保证压电马达箝位性能的发挥,使压电马达能够正常工作。
1.2 工作原理
步进运动实现的三个条件为:驱动过程;箝位的动作过程;驱动和箝位的时序关系,即二者的协调配合过程。图1(b)所示为同步箝位控制压电马达的驱动信号及控制原理图。在同步控制过程中,采用正弦波电压信号驱动振子,信号频率为振子的共振频率,使振子工作在共振状态下;而箝位开关采用方波电压信号驱动,方波的频率和正弦波的频率一致,使箝位开关工作在准静态下。

图1 压电马达的结构及工作原理Fig.1 Schematic diagram and working principle
1.2.1 驱动过程
振子和输出轴的动力学模型如图2所示。该模型忽略了输出轴与导引之间的摩擦以及材料的阻尼,且初始分析不考虑负载。O1、O2分别是m1、m2在弹簧力为零时的初始位置。
振子在正弦电压信号激励下做简谐振动,根据动量守恒定律及动力学知识,可得:

由以上两式可得振子的位移y1,输出轴的位移y2,简谐振动的固有频率ω,以及驱动输出轴的驱动力(弹簧力)F:
式中δ是弹簧的变形量。
由式(3)和式(4)知,振子的简谐振动激励输出轴做往复直线移动,可实现压电马达的驱动过程。
1.2.2 箝位过程
在方波电压信号驱动下,箝位开关对输出轴实现卡紧和松开动作。箝位开关卡紧时施加在输出轴上的静摩擦力fc如式(7)所示:

其中:Nc和μc分别表示正压力和静摩擦系数
当静摩擦力大于最大驱动力(等于kδ)时,输出轴被卡紧。箝位开关松开时,摩擦力为零,输出轴可以自由运动。箝位开关可以改变输出轴的运动方式,实现箝位过程。
1.2.3 驱动和箝位的动作时序关系
图3所示为振子与箝位开关的动作时序关系,图中xc表示箝位开关的变形状态,正值表示卡紧,负值表示松开。如图3(a)所示,在t0时刻,当振子从平衡位置向y方向摆动时,卡紧的箝位开关准备打开,此时输出轴的速度v2和位移y2均为零;在t0至t1时间段,箝位开关打开(如图3(b)所示),根据动量守恒定律及输出轴的受力方向知,输出轴沿y方向运动,速度先增大后减小,位移沿y方向增加。速度v2和位移y2如下:

根据动量守恒定律知,当振子摆动到与t0时刻的位置关于平衡位置对称(图3(b)中的虚实线所示)时,如图3(c)的t1时刻所示,输出轴的速度减小为零,位移达到y方向最大值,为了防止输出轴反向(-y方向)运动,此时箝位开关迅速卡紧,t1如下:

在t1至t2时间段内(如图3(d)所示),箝位开关保持卡紧状态不变,振子沿y方向摆到初始位置,输出轴静止不动,t2即为下一个周期的起始点。以上四步组成一个典型的运动周期,输出轴由此产生一个y方向的微小步距δs:

经过一个周期,输出轴已沿y方向移动一个步距,如此重复,可使输出轴沿y方向持续运动。
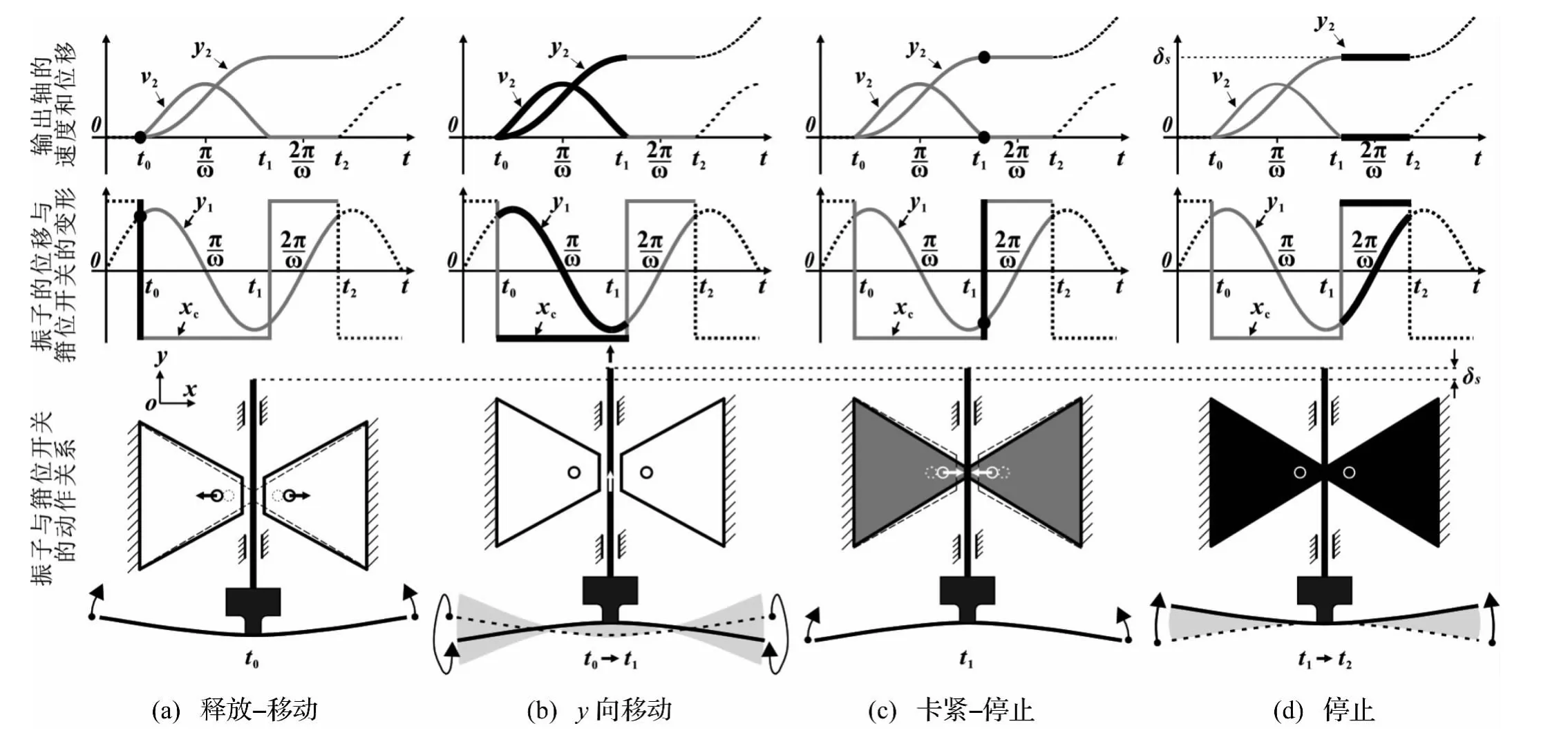
图3 同步箝位控制压电马达工作过程Fig.3 Working cycle of the piezomotor
由上述分析可知,同步箝位控制压电马达工作时:①不考虑负载时,箝位开关在0到π/ω时间段内任意时刻松开,马达可实现y方向运动;箝位开关在π/ω到2π/ω时间段内任意时刻松开,马达可实现-y方向的运动。②为避免冲击与滑动摩擦,箝位开关必须在输出轴的速度为零时迅速卡紧。③ 改变箝位的占空比(箝位开关松开时间与整个工作周期时间的比例)以及改变振子的振动幅度(弹簧的变形量δ),能够调节马达的步距大小。④改变箝位开关的占空比,能够调节马达的宏观速度大小。⑤考虑负载以及摩擦时,箝位开关应该在驱动力F大于负载力和摩擦力总和f时松开,得到在负载和摩擦力下的速度、位移、箝位时刻点以及步距的表达式(12)~(15)。

2 ANSYS仿真设计
为验证理论分析的可行性以及选择合适的结构尺寸,利用有限元仿真软件ANSYS 13.0对驱动振子和箝位开关进行了仿真设计,模型结构及物理参数如表1所示。
2.1 振子模态分析
图4为振子的一阶共振模态仿真结果,由图知悬臂梁的一阶横向弯曲振动带动输出轴做往复直线运动,该模型的一阶共振频率是170 Hz,振子的等效质量m1为 3.2 g,输出轴的等效质量 m2为 25.6 g,等效弹簧刚度k为3 242 N/m。模态仿真结果验证了驱动结构设计的可行性。

图4 振子一阶共振模态的ANSYS仿真Fig.4 First transverse natural vibration of the vibrator from the finite element modal analysis in ANSYS
2.2 箝位开关准静态、模态分析
图5 是箝位开关准静态仿真的结果,由结果知箝位开关能够实现卡紧和松开功能,另外从模态分析仿真结果知箝位开关的一阶共振频率是9.8 kHz,箝位开关的共振频率远离振子的一阶共振频率170 Hz。压电马达工作时,箝位开关能够工作在准静态下,不会被激发出不必要的共振模态,验证了箝位结构设计的可行性。
3 实验测试与分析
3.1 实验装置

图5 箝位开关的ANSYS准静态仿真Fig.5 Quasi-static analysis of the clutch in ANSYS
图6 所示为同步箝位控制压电马达实验装置。信号发生器(Rigol DG1022)通道1输出正弦波电压经电压放大器1(Apex PA94)放大80倍激励振子;信号发生器通道2输出同频方波经电压放大器2(Trek PA05039)放大200倍驱动箝位开关;数字示波器(Rigol DS 5022M)监测上述两个同步信号。激光多普勒测速仪(Neoark Corp.MLD-221,Japan)测试输出轴的步进运动特性。激光位移传感器(optoNCDT 1401-5)测试输出轴在不同负载和占空比下的速度特性。压电马达的结构组成如图1(a)所示,实物图如图6右下角所示,主要结构参数如表1所示。
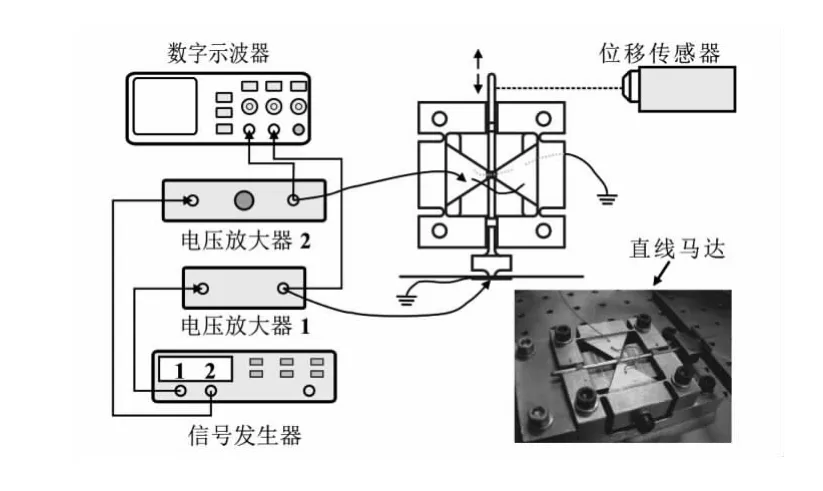
图6 步进运动测试实验装置Fig.6 Measurement system for the stepping characteristics
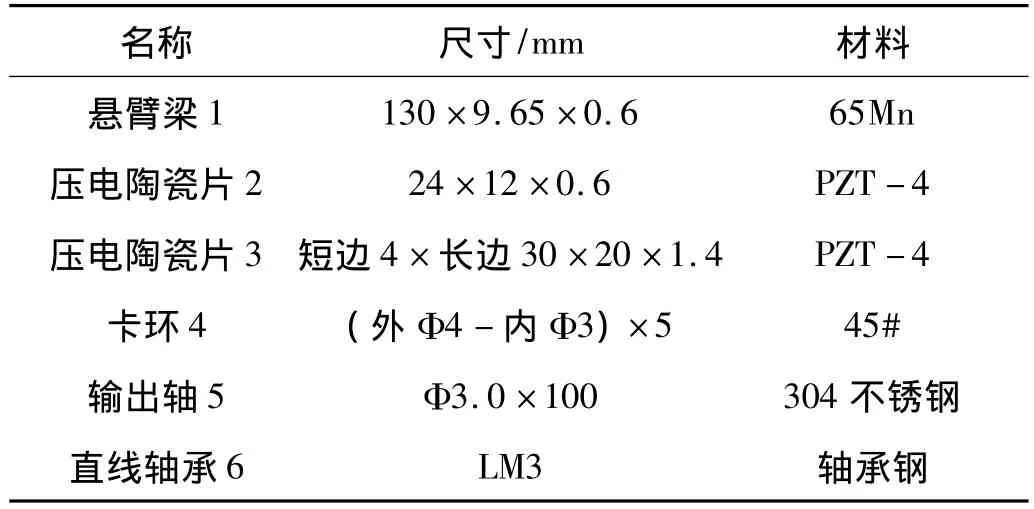
表1 主要结构参数Tab.1 Main structure parameters
3.2 实验结果及分析
3.2.1 箝位开关和振子特性
因为箝位开关工作在准静态下,所以当压电马达工作时箝位开关不能被激发出共振模态,箝位开关的任何阶共振频率都要远离振子的共振频率。由图7箝位开关和振子的导纳曲线知,箝位开关的一阶共振频率为4737 Hz,振子的一阶共振频率(压电马达的工作频率)为160 Hz。

图7 动态特性Fig.7 Vibration characteristics
实验测试结果表明箝位开关的一阶共振频率远远大于振子的一阶共振频率,与ANSYS仿真吻合较好,设计符合要求。
3.2.2 运动特性
图8所示为压电马达的无负载步进运动特性。图中驱动激励信号为80 Vp-p正弦波,频率160 Hz;箝位激励信号为2 kVp-p方波,频率160 Hz,占空比60%。当信号发生器输出的正弦波信号相位超前方波信号130°时(图8(a)),正向运动步距大约是5μm(如图8(c)所示)。当驱动信号相位超前310°时,马达可获得几乎相等步距的反方向运动,如图8(b)和(d)所示。
由图8知,通过调节驱动与控制信号,压电马达能够平稳运动,并且通过调节振子与箝位开关两者驱动信号的相位关系,能够方便实现压电马达的双向可控运动。

图8 步进运动特性Fig.8 Characteristics of the stepping movements
图9 所示为压电马达的负载特性。当负载为5 N、初始占空比为20%,振子位移相位超前箝位位移相位约60°时,压电马达运动状态平稳,此时马达的速度为0.32mm/s。保持上述参数不变,逐渐增加占空比,当占空比增加到30%时,5 N的负载状态下马达几乎无运动。依此方法,另外分别测试了4 N、3 N、2 N负载下、振子与箝位位移不同相位关系时的负载特性。

图9 不同负载时速度与占空比函数关系Fig.9 Velocity with different loads and duty cycles
从图9知,马达在大负载下仅能在较小的占空比下运动,释放时刻驱动力较大;马达承受较轻负载时能在较大的占空比范围内运动,释放时刻驱动力较小。
3.2.3 效率
图10所示为负载从0.5 N增加到5 N时,测得的马达的速度、输入功率以及效率。由图可知,随着负载的增加,马达的速度从8.2 mm/s减小到0.1 mm/s;效率在负载为2 N时达到最大值18.5%;输入功率变化较小,在负载是1N的时候达到最大值48.2 mW。箝位开关上的功率消耗几乎不变,约0.7 mW。
随着负载的增加,马达的速度迅速减小,输入功率变化很小,当速度几乎为零时,输入功率仍然保持很高。因为箝位开关上的功率损耗非常小,几乎可以忽略,所以振子消耗在空气中的功率很大。由实验知,当输出轴固定不动(马达不工作没有功率输出),激励振子使其振幅与正常工作时等大,测出振子的消耗功率最高占总功率的54%。后续研究中,振子结构可以进一步优化,消除或减小消耗在空气中的功率损耗,马达的效率会进一步大幅提高。
4 结论
在对目前压电马达存在的一些问题分析研究的基础上,提出了一种新的同步箝位控制压电马达工作模式,该马达具有以下几个优点。①能量传输效率高。箝位开关卡紧时位移为零,松开时力为零,理论上箝位开关功率损耗始终为零,实验测试证明实际功率消耗几乎为零。②使用寿命长。卡紧时,箝位开关与输出轴无相对滑动;松开时两者不接触。该压电马达始终不存在滑动摩擦。③精密位置控制。该压电马达的步距能够在零和最大步距之间任意调节,可应用于精密位置控制。
通过对原理样机的实验测试知:负载是0.5 N时样机的速度达到8.2 mm/s;最大负载能力达到5 N;总效率达到18.5%,净效率达到72.5%,实验结果表明该种压电马达具有良好的性能。经过对振子机构的进一步优化设计以及添加力和速度传感器精确控制箝位开关开启和关闭时刻点,可使该种马达在力、速度、效率得到大幅提高。该研究是对提高压电马达的综合性能、尤其是解决压电马达使用寿命问题的有益探索,对拓展压电马达的研究思路具有重要意义。
[1]李向华,陈 超,赵淳生.非接触式直线型超声电机的振动分析[J].振动与冲击,2010,29(7):149-152.LI Xiang-hua,CHEN Chao,ZHAO Chun-sheng.Vibration analysis of non-contact linear ultrasonic motor[J].Journal of Vibration and Shock,2010,29(7):149-152.
[2]张健滔,朱 华,赵淳生.行波型杆式超声电机定子的参数化有限元法优化设计[J].振动与冲击,2009,28(7):122-125,152.ZHANG Jian-tao,ZHU Hua,ZHAO Chun-sheng.FEM-based parametric optimum design of a traveling-wave type barlike ultrasonic motor stator[J].Journal of Vibration and Shock,2009,28(7):122 -125,152.
[3]王金鹏,金家楣,赵淳生.用于精密定位平台的直线超声电机的异步并联[J].光学精密工程,2011,19(11):2693-2702.WANG Jin-peng, JIN Jia-mei, ZHAO Chun-sheng.Asynchronous bundling of linear ultrasonic motor for precision positioning stage[J].Opt.Precision Eng.,2011,19(11):2693-2702.
[4] Park S H,Agraz J,Tuncdemir S,et al.Delta-shaped piezoelectric ultrasonic motor for two-dimensional positioning[J].Japanese Journal of Applied Physics,2008 47(1):313-318.
[5]Spanner K.Survey of the various operating principles of ultrasonic piezomotors[C].Presented at the Actuator 2006,10th International Conference on New Actuators,Bremen Germany,2006,414-421.
[6] Frank J,Koopmann G H,Chen W,et al.Design and performance of a high force piezoelectric inchworm motor[J].Smart Structures and Materials 1999:Smart Structures and Integrated Systems,Pts 1 and 2,1999,3668:717-723.
[7]Oh,C H,Choi JH,Nam,H J,et al.Ultra-compact,zeropower magnetic latching piezoelectric inchworm motor with integrated position sensor[J].Sensors and Actuators a-Physical,2010,158(2):306 -312.
[8] Morita T,Yoshida R,Okamoto Y,et al.A smooth impact rotation motor using a multi-layered torsional piezoelectric actuator[J].IEEE Transactions on Ultrasonics Ferroelectrics and Frequency Control,1999,46(6):1439 -1445.
[9]Duan Z Y,Wang QK.Development of a novel high precision piezoelectric linear stepper actuator[J]. Sensors and Actuators A-Physical,2005,118(2):285 -291.
[10]张健滔,金家楣,赵淳生.新型多自由度圆环形驻波超声电机[J].振动与冲击,2011,30(12):223 -225,240.ZHANG Jian-tao,JIN Jia-mei,ZHAO Chun-sheng.Novel multi-DOF ring-shaped standing-wave type of ultrasonic motor[J].Journal of Vibration and Shock,2011,30(12):223 -225,240.
[11] Liu Y X,Chen W S,Liu J K,et al.A cylindrical standing wave ultrasonic motor using bending vibration transducer[J].Ultrasonics,2011,51(5):527-531.
[12]金家楣,泮振锋,钱 富.阶梯圆柱形压电振子直线型超声电机[J].振动、测试与诊断,2011,31(6):715 -719.JIN Jia-mei,PAN Zhen-feng,QIAN Fu.Stepped cylindrical piezoelectric vibrator linear ultrasonic motor[J].Journal of Vibration,Measurement& Diagnosis,2011,31(6):715-719.
[13] Watson B,Friend J,Yeo L.Piezoelectric ultrasonic resonant motor with stator diameter less than 250μm:the Proteus motor[J].Journal of Micromechanics and Microengineering,2009,19(2):022001(5pp).
[14]Zhang Q,Pan CL,Ma Y T,et al.Piezoelectric rotary motor based on active bulk torsional element with grooved helical electrodes[J].IEEE-Asme Transactions on Mechatronics,2012,17(2):260-268.
[15] Hii K F,Vallance R R,Menguc M P.Design,operation,and motion characteristics of a precise piezoelectric linear motor[J].Precision Engineering,2010,34(2):231-241.
