智能停车场Web车位引导系统的设计与实现
2013-05-14李丹
李 丹
(韶关学院 计算机科学学院,广东 韶关512005)
随着我国经济的发展和居民收入水平的不断提高,机动车保有量逐年增加.车辆与车位的配置比例严重失调,车多车位少、停车难的问题日益严重.解决这一问题,除了增加车位的规划与建设外,通过提高现有停车场的智能化水平、设计车位引导系统来提高现有车位的利用率也是一个有效途径.
车位引导系统是应用于停车场,通过车位检测模块检测数据,经过数据处理与传输在引导指示模块显示信息从而引导车辆顺利进入目的车位的智能化系统[1].现有智能停车场的车位引导系统具有车位占用情况动态检测与提示、车位使用率统计、车位进出指示等功能,引导车主找到空位.但上述功能只有当车主进入停车场内才能通过车场内的公共车位引导系统获得[1-3],无法满足人们在出发前或在途中时根据多个可选目的停车场的当前车位信息自由自主的选择车位,甚至更换目的地以及在出入车之前或当时随时随地的获得所选车位的最佳进出路线指示等需求.本文提出一种智能停车场Web车位引导系统,用户可通过手机、计算机等终端通过Web浏览器获得目的地停车场的实时车位信息,以Flash动画页面的形式为用户显示停车场的车位平面布局、当前车位占用率、空余车位数量、位置、大小以及进出各车位的动态路线提示等信息,帮助车主对不同停车场的不同车位做出合理选择,从而避免到了目的地才发现没有合适的车位或者由于对停车场内环境不熟悉造成的停车不便等问题.
1 总体方案设计
系统主要由车位信息检测模块、下位机接收控制模块、上位机控制模块、车位引导显示模块四大部分组成.其中,车位检测模块与下位机接收控制模块统称下位机模块.

图1 智能停车场在线车位引导系统框图
如图1所示,每个车位上均装有一个车位信息检测模块,用于检测停车场每个车位的状态,并将采集的数据通过无线发射装置发送至下位机接收控制模块.下位机接收控制模块将接收到的所有车位信息通过串口发送至上位机,由上位机控制模块将串口传来的数据存入数据库.当用户利用手机、平板计算机等终端设备通过Web浏览器访问该系统域名时,服务器中的车位引导显示模块负责读取数据库中的停车场信息并通过网络传输至客户的Web浏览器并以Flash动画形式显示.用户通过Web访问可随时随地直观的读取停车场内当前的车位信息,并可以由针对性的获取车位路线指示.
对比现有系统[1-3],本系统的主要特点在于:(1)停车场内各车位信息检测模块采用无线收发数据,省去了布线的麻烦.(2)车位引导显示模块不只限于本地指示屏等的引导,而是可以利用计算机等终端设备通过Web浏览器随时随地获得停车场的车位引导信息.(3)显示方式突破了本地显示屏只能显示某区域空余车位数、或车场布局的局限,采用Flash动画用户不仅对停车场的车位布局、可用车位信息一目了然,还可以通过人机交互动态的呈现所需车位的进出路线指示等信息,服务更具人性化.
2 系统下位机硬件设计
该系统主要可分为两大部分,下位机及上位机.下位机由单片机控制电路实现,上位机在PC机中通过软件实现.下位机又分为车位信息检测模块、下位机接收控制模块两部分.系统硬件电路设计如下.
2.1 车位信息检测模块
车位信息检测模块固定于在各车位上方天花板上,用于检测并无线发送车位信息至下位机控制模块,其电路组成框图如图2所示.由单片机控制模块、超声测距传感模块、电平转换模块、无线模块四大部分组成.其中,STC89C52单片机为主控制器,其标准供电电压5 V,系统时钟晶振为11.059 2 MHz.采用HCSR04超声波测距传感器通过距离探测判断是否有车,其工作电压5 V.采用nrf905无线收发器对数据进行收发,其工作在433 Mhz开放频段,工作电压范围:1.9 V~3.6 V,支持50 kbps传输速率,传输距离平均可达150 m,完全可以满足停车场范围内的无线信号传输.AMS1117芯片把5 V电源转化成3.3 V电源,给nrf905无线收发器供电.
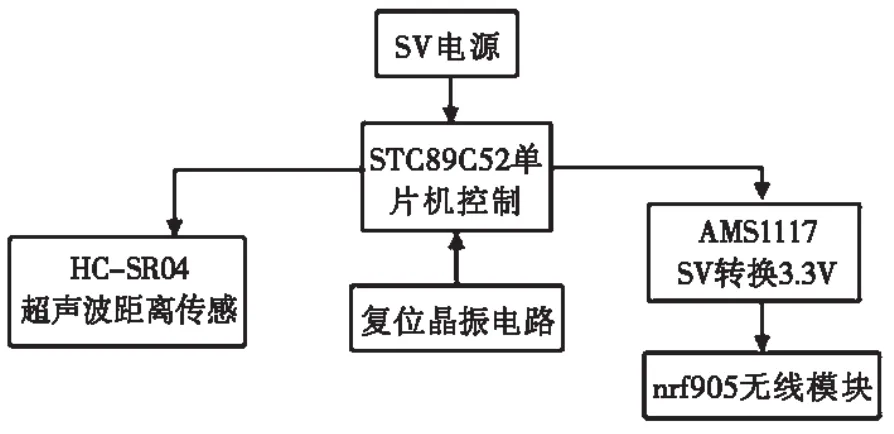
图2 车位信息检测模块组成框图
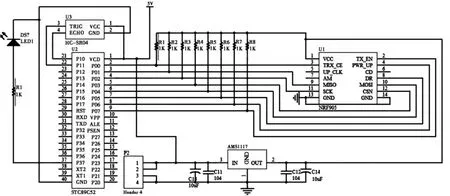
图3 车位信息检测模块电路图
图3为各模块引脚连接的电路设计图.其中,HCSR04超声波测距传感器除了电源和地外还有两个引脚,一个是触发引脚,与单片机的P1.1脚相连,为其提供10 us以上的高电平脉冲触发信号.另一引脚为回送信号,与单片机的P1.0脚相连.当传感器被触发,通过P1.0检测回送引脚的高电平脉冲宽度可计算得出测量距离.P3.7脚接LED灯,用于指示车位有无.控制nrf905模块的引脚中除电源与地外,PWR_UP,TRX_CE,TX_EN,3个引脚用于控制其工作模式.工作模式可处于接收、发送、空闲、关机四种状态.MISO,MOSI,SCK,CSN四个引脚用于SPI(Serial Peripheral Interface--串行外设接口)的数据收发.其余,uCPLK晶振分频输出、CD载波检测指示、AM地址匹配指示在发送端暂未用到.AMS1117点电平转换模块中P2为排线,方便电路测试与连接.
2.2 下位机接收控制模块
下位机接收控制模块放置在停车场控制中心与中心控制计算机通过USB接口相连,用于接收各车位上方车位检测信息模块发送的信息并将其通过串口发给中心控制计算机.由单片机控制模块、RS232-USB转换模块、电平转换模块、无线模块四大部分组成.RS232-USB转换模块模块采用PL2303HX芯片,可实现RS232串口通信数据格式与USB数据格式的双向转换,并利用USB口为单片机提供5 V供电,通过USB接口实现下位机控制模块与计算机的串口通信.电路接口为PL2303HX的RXD,TXD分别接单片机的TXD,RXD.nrf905模块的CD、AM引脚分别接P1.2,P1.3,用于接收信号的检测.其余模块电路与图3相同.
3 系统下位机软件设计
3.1 检测与接收控制程序流程
下位机车位信息检测模块及接收控制模块的程序流程图如图4(a)、(b)所示.检测模块程序开始首先是对超声波距离传感器所要用到的定时器T0及超声测距传感器进行初始化:将定时器寄存器初值设为TMOD=0x21,使其工作在方式1,初值TH0=TL0=0,并令TR0=1开启定时器.之后,将无线模块nrf905上电后设为空闲模式并将其功能设置为:(1)不重发,频率433.2 MHz,发射功率6 dBm,正常模式;(2)收发各4字节地址宽度;(3)收发有效数据宽度2位;(4)16位CRC校验,允许校验,晶振16 MHz,没有外部时钟;(5)确定其接收机地址.
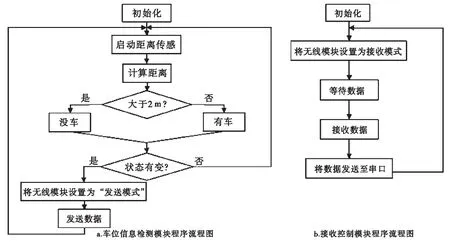
图4 下位机控制程序流程图
初始化之后启动传感器,令TX(单片机P1.1脚)为1,持续10 us后置0.当传感器回送信号RX(单片机P1.0脚)为1时启动定时器令TR0=1,直至RX=0停止定时令TR0=0.根据传感器给定公式:测试距离=(高电平时间×声速(340 m/s))/2计算得到探测距离.系统设定车位地面距天花板高度3 m,车体高度大于1 m.根据探测距离可以判断,当测得距离小于2 m时说明车位有车停放,车位上停车指示灯亮,反之无车,停车指示灯灭.当车位状态发生变化:即由有车变成没车或由没车变成有车的时候,单片机控制启动无线nrf905,将其设为发送状态并发送数据.之后一直循环执行上述步骤.
接收控制模块进入程序首先对串口进行初始化和对无线模块进行功能设置,使接收端无线模块的功能和发送端的功能一样,这样才能保证无线模块之间的正常通信.之后进入循环接收流程:当接收端的无线模块nrf905在指定频率检测到信号并地址匹配后就开始接收数据,单片机将接收到的数据存入发送寄存器通过USB接口以串口通信的格式发送到上位机.
3.2 下位机串口通信协议设定
通过上述流程,下位机控制模块将无线接收的数据经串口Com4发送给上位机.串口通信协议设定如下:采用10位异步通信方式,单片机的串行口控制寄存器SCON工作在方式1,初值设为SCON=0x50,每次发送或接收一帧信息为10位:1位起始位(0)、8位数据位和1位停止位(1),无校验位.采用定时器1工作方式2为波特率发生器,定时器寄存器初值设为TMOD=0x20.根据设定通信波特率9 600 bps,将电源控制寄存器初值设为PCON=0x00,定时器初值为TH1=TL1=0xFD.设定下位机发给串口的车位信息格式为:2个8位的16进制数,第一个8位表示车位号,第二位表示车位状态.比如发送{0x0A,0x00}表示10号车位没车,{0x0A,0x01}表示10号车位有车.
4 系统上位机软件设计
4.1 数据库设计
本设计数据库采用SQL Server 2005以支持多用户Web访问.建立一个名为carInfarmation的数据库,在数据库中建立carStatus表用于存储车辆信息.表中设置四个变量:car_num,car_on,car_sta,car_end,car_time分别表示车位号码,是否有车,进入车位时间,离开车位的时间,停车总时间.
4.2 上位机接收控制模块
上位机接收控制模块是在以PC机Windows平台的上位机中利用VB进行开发设计的功能模块,其功能是将下位机发来的串口数据接收并存入数据库,从而实现下位机与前台车位引导显示模块的信息交互.设计通过MSComm控件实现串口数据收发,工作流程为:首先利用ADO的connection对象的Open方法连接名为carInfarmation数据库,之后选择串口号并打开串口,当有数据来时触发接收数据事件,将数据以字节为单位读入.第一字节代表车位号,第二字节为是否有车.当某车位号从无车变为有车时,更新数据库中表carStatus中相应车位的车位状态car_on并记录入车时间car_sta.当某车位从有车变为无车时,更新相应车位的车位状态car_on并记录出车时间car_end,同时计算出入车的时间差即停车时间car_time.
4.3 车位引导显示模块
车位引导显示是整个系统的前台,是一个供用户通过Web浏览器访问的站点.用户访问页面采用Flash动画实现车位引导显示.由于Flash不能直接操作数据库,需通过ASP.net执行与数据库的交互.因此,设计前台Flash采用Flash CS4,Action Script3.0语言,与数据库的交互采用VisualStudio 2008,C#语言.首先通过Visual studio 2008新建一个ASP站点,用OdbcConnection连接carInfarmation数据库对应的ODBC数据源.ASP通过DataAdapter读取数据库中表的信息存在DataSet中,并用Response.Write()语句将信息输出在一个指定页面.而Flash定时通过URLRequest()方法向该页面的唯一资源定位符(URL)建立请求对象,通过URLLoader()方法建立一个urlLoader对象,利用urlLoader.load(URLRequest对象)向URL指定页面请求加载ASP输出的数据,通过urlLoader.addEventListener(Event.COMPLETE,ec)对该事件进行侦听,当完成响应结果就触发COMPLETE事件同时调用ec函数将数据更新到Flash界面上实现动态的车位信息引导显示.
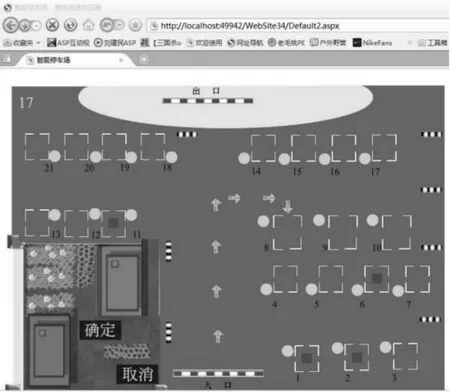
图5 前台用户Web访问车位引导显示界面
用户通过Web访问看到的Flash车位引导显示界面效果如图5所示.该界面是韶关学院教师公寓停车位的简单模拟.每个方框表示一个车位,分别编号1~21,总计21个车位.方框中为红色的表示已有车.对于有车车位,车主在出车前点击旁边灰色圆形按钮并点击确定按钮可显示该车为的最佳出车路线动画,引导出车.当车主出车完毕或不需引导时,点击取消按钮结束显示.对于无车车位,车主可以点击旁边的灰色圆形按钮并选择确定按钮,系统会显示进入相应车位的最佳路线动画.如图5中8号车位的入车路线动态指示动画截图.当不需要指示时,点击取消按钮将结束动画显示.界面左上方实时显示剩余车位总数,图5中当前剩余数为17.
5 结论
Web车位引导系统突破了现有车位引导系统只能在停车场内通过固有设施在本地获得引导的局限,车主在出发前及停车场内可利用手机、计算机、笔记本、平板电脑等通信终端通过Web浏览获得停车场内的车位的实时状态,并根据车主的选择以动画形式显示出入车的最佳路线,随时随地为车主提供车位引导.能够有效降低车主在出行时寻找车位及进出车位所需的时间,提高车场的智能化管理水平及车位的综合利用率,给用户带来高效、舒适的停车体验.
[1]郭娟黎.大型停车场综合管理系统方案设计[J].建筑智能化,2012,31(6):105-108.
[2]谭娟.四川职业技术学院智能停车管理系统设计与实现[D].成都:电子科技大学,2012.
[3]黄红花,熊江,王海升.太原南站项目地下车库停车自动引导系统方案介绍[J].智能建筑电气技术,2007,1(5):30-33.
[4]王萍,陈长青,龚睿等.基于 nrf905 的无线串口通信系统[J].微计算机信息,2007,23(11):281-283.
[5]伍守意.FLASH项目与数据库通信的研究——基于ASP.NET技术[J].电脑科知识与技术,2010,6(26),7383-7389.
