基于含误差测量结果的Lamb波损伤检测*
2013-04-24刘喜平
刘喜平,余 龙
(1.陕西理工学院 土木工程与建筑学院,陕西 汉中 723001;2.西北工业大学 力学与土木建筑学院,陕西 西安 710072)
Lamb波是一种在薄壁结构中产生的平面应变波,具有传播速度快,耗散小和对损伤敏感等特点。基于观察损伤对Lamb波传播过程影响的结构损伤检测方法,已经被证明能够快速高效完成对大型板壳结构表面腐蚀、裂纹、穿透孔洞和焊缝缺陷等多种损伤的检测[1-4];因此在损伤检测研究中受到了广泛的重视[5-9]。
Wang D和Su Z Q等[10-12]研究者充分考虑到实际工程监测时传感器数据中的误差因素,在Lamb波ToF(Time of Flight)损伤检测方法中通过引入概率思想,提高了存在测量误差情况下的损伤检测结果可靠性。但已有研究成果中,首先使用了不够直观的概率定义,其次对作为该方法中核心内容的概率密度函数使用了正态分布假设。
本文对基于概率的Lamb波损伤检测中的概率方法进行了分析,给出了新的概率定义;并通过在数值仿真结果中加入高斯白噪音,对已有工作中的测量结果正态分布假设进行了检验;最后使用非参数统计领域的最新研究方法获取了测量结果分布的真实概率密度函数。
1 基于概率的Lamb波损伤检测方法
1.1 Lamb波ToF损伤检测方法
ToF方法是当前基于Lamb波的损伤检测中使用最广泛的方法之一。当Lamb波被激发后,传感器将首先接收到直接从激励器发出的Lamb波信号;如果结构内有损伤存在,则传感器还将接收到损伤反射的Lamb波信号。Lamb波直达信号和损伤反射信号均为波包形式信号,可以采用阈值法,互相关函数法和小波变换法等方法测量其波达时间[13]。两个信号到达传感器时间之间的差距称为ToF。式(1)给出了ToF的定义:
(1)
其中Ti-j是编号i激励器与编号j传感器测量到的ToF值,LA-D是激励器到损伤间的距离,LD-S是损伤到传感器间的距离,LA-S是激励器到传感器间的距离,VS0和VSH0-damage分别是S0波和损伤反射波SH0-damage波的速度。
在使用了一组激励器和传感器测量到一个损伤ToF值之后,符合公式(1)的损伤位置是围绕激励器和传感器的一条近似椭圆曲线。因此,一般采用多个激励器传感器组合,分别获取多个ToF测量值,绘出多条相应曲线,各条曲线的公共交点为损伤具体位置。
1.2 基于概率的ToF方法
在传统ToF方法中,不考虑各组激励器传感器测量到的ToF值中的误差,这样多条损伤可能位置曲线将准确交于一点。但是在实际中,由于各种噪音的干扰,ToF测量值中的误差是不可避免的。因此多条损伤位置曲线不能交于一点,存在损伤位置难以确定的问题。
针对这一问题,Wang D和Su Z Q等研究者引入概率论概念,改变了传统ToF方法中在寻找损伤位置时完全不考虑损伤可能位置曲线之外的点的思想,提出由于各种测量误差的存在,实际损伤位置有一定概率不在依据ToF测量值绘出的损伤位置曲线上。据此思想提出了基于概率的ToF损伤检测方法。其方法主要内容可以分为两部分,首先是依据每组ToF测量结果对检测区域内各点进行损伤概率评估,使用损伤分布概率图来代替损伤位置曲线。最后对各组传感器结果进行综合评估,得到目标结构损伤分布概率图。这样在给定了损伤概率阈值之后,可以方便地依据概率数值给出明确的损伤可能位置区域。解决了传统方法在测量结果存在误差时难以给出具体损伤位置的问题。
当前已有的研究成果主要是集中在该方法第二部分内容。实际上在已有成果中的第一步内容上还存在有两个不足:
1)概率定义问题。已有工作中的“损伤可能位置概率”,是指实际损伤位置距离某次测量值的概率分布fD(T)(s),其中s=D(T)-D(Tm),T和Tm分别是ToF值和其测量值,D(T)和D(Tm)分别是损伤真实位置和依据ToF测量值得到的损伤位置。由于噪音干扰,多种损伤的ToF测量值都有可能等于Tm,所以这种定义比较无论是通过理论推导还是样本分析,想要给出fD(T)(s)都是比较困难的。
2)概率密度函数估计方面。当前已有工作中,对fD(T)(s)普遍使用了经验公式进行估计。在Su的工作中,根据经验采用高斯分布概率密度函数
(2)
其中Zij是平面各点与测量结果所对应损伤可能位置曲线间的距离,参数σij根据经验给出。
在Wang的工作中,平面上坐标为(x,y)的点的损伤概率由以下公式给出:
(3)
其中Wk[Rk(x,y)]是不同测量路径下的权重系数,Rk(x,y)是点与路径间的距离的一个线性函数,根据经验给出。
针对已有工作中的问题,首先应使用fTm(t)(即测量结果Tm的分布函数,其中t为时间)这一定义;其次,前人根据经验公式估计概率密度函数的方法,虽然具有一定的可行性,但由于使用了正态分布假设,因此缺乏对不同噪音情况的稳健性。本文提出应该进行多次测量,运用统计学方法对测量结果样本进行科学分析,获取每一组传感器测量结果的概率分布密度函数,并据此分析真实损伤位置。
2 对正态分布假设的检验
使用ANSYS软件,以边长为1 mm正方形单元,建立了600 mm × 600 mm × 1.5 mm的四边简支铝板模型,弹性模量、泊松比和密度分别为71e9 GPa, 0.35和2 711 kg/m3。如图1所示,以直径为18 mm的穿透圆孔为检测目标。使用加汉宁窗的5周300 kHz正弦波为激励信号,激发出速度为5 159 m/s的S0波和2 611 m/s的A0波。模型中包括8个对称分布压电传感器。使用其中四组,分别为s2-6(由2号和6号构成)、s3-7、s4-8和s3-5。其中s4-8接收到的信号如图2所示。针对每组传感器使用阈值法(即使用超过阈值的多个波峰时间的平均值来计算波包到达时间)分别进行了30次测量以获得ToF统计样本。
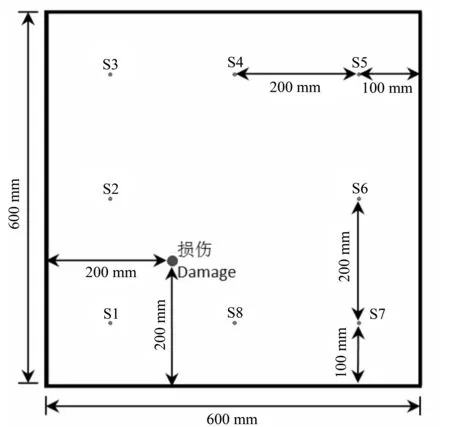
图1 数值模型Fig.1 Schematic of numerical simulation mode
为模拟在实际实验环境中的噪音,在通过仿真获得的Lamb信号中分别加入了20 dB和30 dB的高斯白噪声。
首先在30 dB噪音下,使用阈值法分别进行了30次ToF测量。观察测量数据分布直方图(图3),易见该数据分布不属于正态分布类型。统计学中的Lillieforss检验可以用来检测数据是否服从正态分布[14]。本文数据在95%置信区间下的Lillieforss检验计算值为0.332 1,远大于临界值0.158 8,说明数据样本与正态分布存在显著性差异。
对20 dB噪音下的测量结果进行分析也得到同样结果,即测量结果分布不属于正态分布。
由于高斯白噪音已经是理想化的情况,而实际工程中的噪音干扰更加复杂,因此实际工程中的ToF测量值分布与正态分布差异将更大。
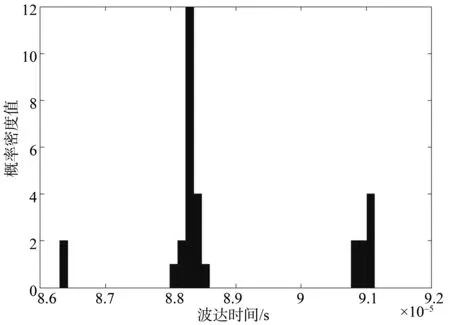
图3 30dB噪音下测量数据分布直方图Fig.3 Histograms of measured data under 30dB noise
3 概率密度估计
统计学中概率密度估计方法可分为两类,即参数方法和非参数估计方法。如采用已有工作中的正态分布假设,则可使用极大似然估计得到正态分布的两个参数的估计量[15]:
(4)
(5)
其中Ti-j,k由i-j传感器激励器组测量的ToF数值,n为样本数目。由于式(5)中给出的方差估计量只是渐进无偏估计,因此一般使用改进后的最小方差无偏估计量:
(6)
当测量数据分布类型未知时,则应使用非参数估计方法。其中应用最广泛的是核估计方法[16]。
设K(u)为定义在(-∞,∞)上的一个Borel可测函数,而hn>0为常数,则
(7)
称为总体密度的一个核估计。K称为核函数,而hn称为窗宽(Bandwidth)。核函数和窗宽的选择对核估计结果有重要影响。一般使用渐进均方误差的方法来选择窗宽:
(8)
但在上式中包含待估计函数f本身,所以并不能直接用来选择窗宽。如果假设f为正态分布类型,则可以获得公式(8)的解:
(9)
这就是核估计中常用的高斯近似法。但由于在窗宽选择中分布类型假设的引入,使得这种核估计方法不再是严格意义上的非参数估计。
使用参数估计方法和基于高斯近似的核估计方法,分别对30 dB和20 dB噪音下的测量结果进行了概率密度估计(图4、图5)。可见已有工作中基于正态分布假设的概率密度结果实际上是一种过平滑的估计结果。基于高斯近似的核估计方法在较小噪音情况下,能够很好的反映出真实概率分布的特征;但是当噪音增加到20 dB时,也退化为一种过平滑估计。
由此可见,为了对Lamb波损伤检测中的ToF测量值进行概率密度估计,需要引入更加先进的概率密度估计方法。
针对常见核估计方法的问题,Botev在2010年提出了一种新的基于扩散方程的核估计方法[17]。该方法具有良好的估计性能,且不需要对样本分布类型做出任何假设。
Botev估计方法首先给出如下扩散微分方程
(10)
图4 30 dB噪音下s4-8传感器组概率密度函数估计结果 Fig.4 p.d.f. estimated result of s4-8 under 30 dB noise
图5 20 dB噪音下s4-8传感器组概率密度函数估计结果Fig.5 p.d.f. estimated result of s4-8 under 20 dB noise
该方程的解可以用来进行核估计:
(11)
在对以上基于扩散方程的核估计方法进行窗宽选择时,同样面临与传统核估计渐进均方误差法窗宽选择时依赖于fl的问题(其中l是导数阶次),为解决这一问题,Botev提出了改进的Sheather-Jones算法:
1)对给定的l>2,令z0=ε,n=0;其中ε是计算机计算精度;
2)令zn+1=ξγ[l](zn)

其中l值一般推荐为5。
在上述改进Sheather-Jones算法基础上,可以进一步给出基于扩散方程的核估计:
1) 执行Sheather-Jones算法步骤;
2)令在上述步骤中得到的高斯核估计值为px,再令ax=pαx,其中α∈[0,1];
3)使用下式来给出‖Lf‖2估计值:
(12)
4)将‖Lf‖2估计值带入下式:
(13)

图4、图5中给出了使用Botev方法对30 dB和20 dB噪音下测量结果的概率密度估计结果。从中可见,当噪音增加到20 dB噪音,只有Botev方法仍能很好的对样本概率密度函数进行估计。
完成概率密度函数估计后,依据估计结果,根据式(1),将fTmt映射为检测目标结构内的损伤位置概率分布;通过与其他传感器组给出的损伤位置概率分布相结合得到损伤检测结果。图6、图7和图8中分别给出了20 dB噪音情况下,基于三种方法估计结果的损伤检测结果。其最大概率损伤位置分别为(0.195 5,0.201 5),(0.198 5,0.201 5)和(0.199 5,0.201 5)。
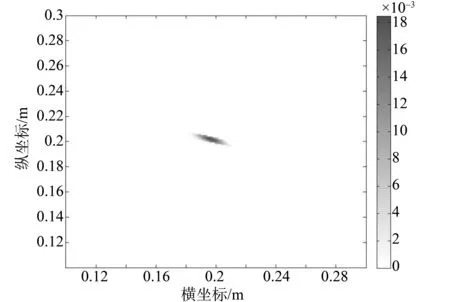
图6 基于参数估计的损伤检测结果Fig.6 Damage localization result using parametric estimate method
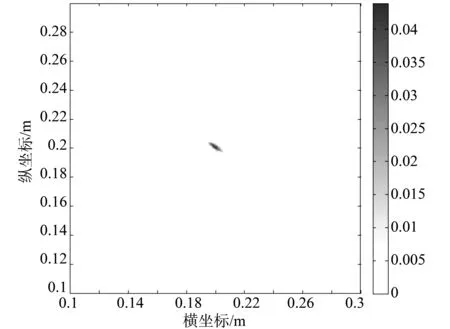
图7 基于高斯分布假设核估计的损伤检测结果Fig.7 Damage localization result using kernel density estimation based on Gaussian approximation
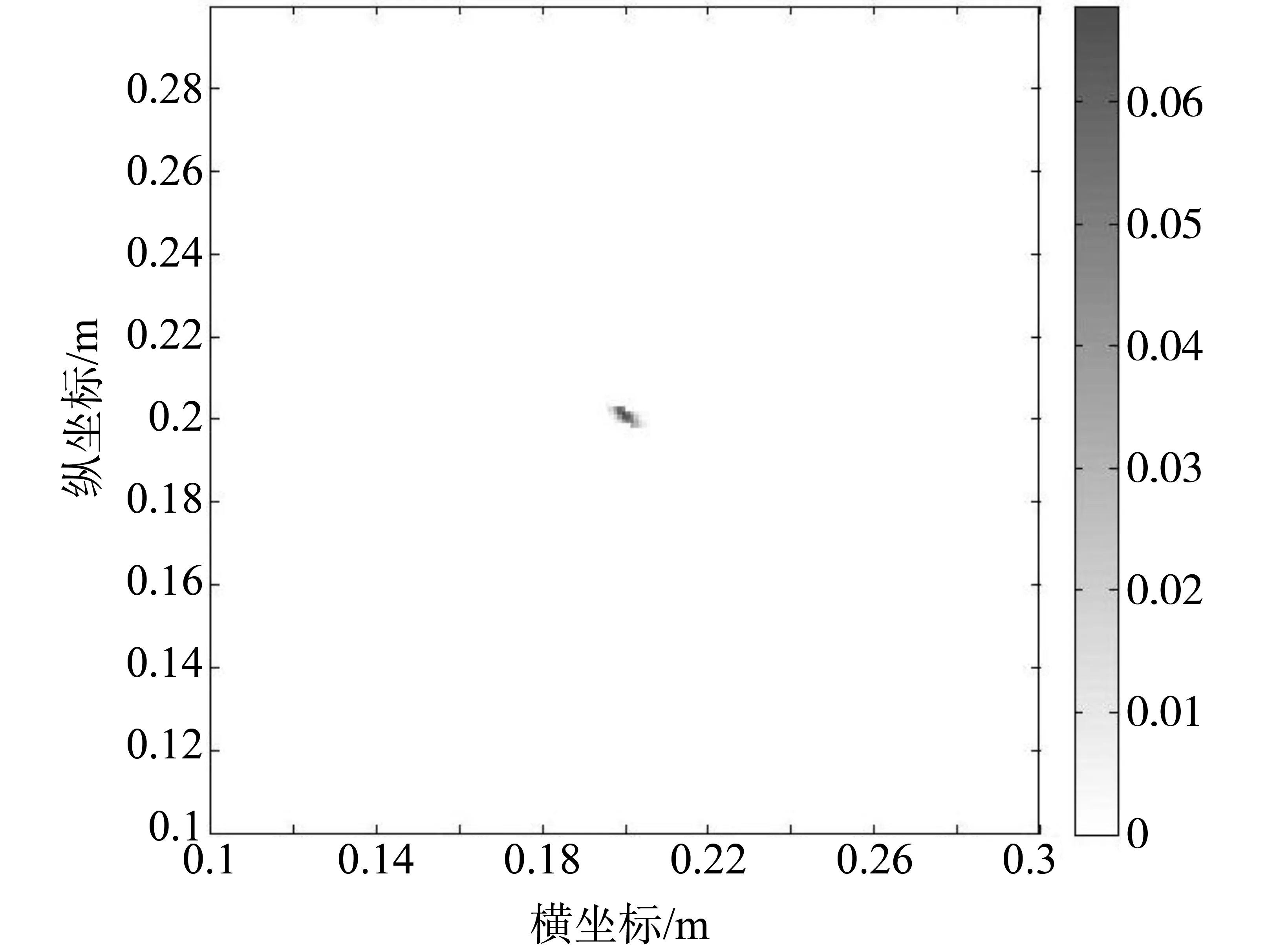
图8 基于Botev方法的损伤检测结果Fig.8 Damage localization result using Botev method
从中可以看出:由于参数估计和基于高斯假设的核估计方法给出了真实概率分布的一种过平滑结果,只有Botev方法给出的结果准确反映了真实概率分布的细节特征。因此基于Botev方法的损伤检测结果也具有最高的精度。可见,准确的概率密度函数估计对损伤检测结果精度有着直接的影响。
4 结 论
针对已有基于概率的Lamb波损伤检测工作中在对测量结果正态分布假设的基础上,使用经验公式方法对损伤位置概率进行估计的不足,指出应使用统计学方法,通过对测量样本进行分析来得到样本分布的可靠估计结果。首先通过直方图和Lillieforss检验证明了即便是在较为理想的高斯白噪音干扰下,ToF测量值分布也与正态分布存在明显差异;其次,通过数值仿真实验结果对参数估计、核估计和Botev核估计三种方法进行了评估。结果表明,即使在噪音较大情况下,基于扩散方程的Botev核估计方法仍能够清晰的给出ToF测量值概率密度函数的真实本质特性。最后通过对比损伤检测结果,指出准确的ToF测量值概率密度函数估计结果对损伤检测结果精度有着直接的影响。
因此,在基于概率的Lamb波损伤检测中引入Botev核估计方法,首先能够完善整个检测过程方法的理论体系,不再依赖于经验公式;其次,也能够提高基于概率的Lamb波损伤检测的可靠性和精度。
参考文献:
[1] LU X, LU M Y, ZHOU L M, et al. Evaluation of welding damage in welded tubular steel structures using guided waves and a probability-based imaging approach[J]. Smart Materials and Structures, 2011, 20(1):015018.
[2] CHEN J G, SU Z Q, CHENG L. Identification of corrosion damage in submerged structures using fundamental anti-symmetric Lamb waves[J]. Smart Materials and Structures, 2010, 19(1):015004.
[3] ZUMPANO G, MEO M B. A new nonlinear elastic time reversal acoustic method for the identification and localisation of stress corrosion cracking in welded plate-like structures-A simulation study[J]. International Journal of Solids and Structures, 2007, 44: 3666-3684.
[4] 王强, 袁慎芳. 无参考主动Lamb波结构损伤时反成像监测方法[J]. 航空学报, 2010, 31(1): 178-183.
[5] 王瑜, 袁慎芳, 邱雷, 等. 主动Lamb波中的空间滤波器结构健康监测[J]. 振动、测试与诊断, 2011, 31(6): 794-797.
[6] SU Z Q, YE L, LU Y. Guided Lamb waves for identification of damage in composite structures : A review[J]. Journal of Sound and Vibration, 2006, 295: 753-780.
[7] AJAY Raghavan, CARLOS E S. Cesnik, review of guided-wave structural health monitoring[J]. The Shock and Vibration, 2007, 39: 91-114.
[8] 胥保春, 袁慎芳, 邱雷. Lamb波与瞬时相位技术在损伤识别中的应用[J]. 振动、测试与诊断, 2010, 30(3): 240-244.
[9] 张海燕,于建波,孙修立,等. HHT在Lamb波检测信号分析中的应用[J]. 振动、测试与诊断, 2010, 30(3): 223-226.
[10] WANG D, YE L, SU Z Q, et al. Probabilistic Damage Identification Based on Correlation Analysis Using Guided Wave Signals in Aluminum Plates[J]. Structural Health Monitoring, 2010, 9(2): 133-144.
[11] SU Z Q, WANG X M, CHENG L, et al. On selection of data fusion schemes for structural damage evaluation[J]. Structural Health Monitoring, 2009, 8(3):223-241.
[12] SU Z Q, CHENG L, WANG X M, et al. Predicting delamination of composite laminates using an imaging approach[J]. Smart Materials and Structures, 2009, 18(7) :074002.
[13] 袁慎芳. 结构健康监控[M]. 北京:国防工业出版社, 2007:78-100.
[14] LILLIEFORS H W. On the kolmogorov-smirnov test for the exponential distribution with mean unknown[J]. Journal of the American Statistical Association,1969, 64:387-389.
[15] 陈希孺. 概率论与数理统计[M]. 合肥:中国科技大学出版社,2009:52-61.
[16] 陈希孺, 方兆本, 李国英, 等. 非参数统计[M]. 上海:上海科学技术出版社, 1989:45-52.
[17] BOTEV Z I, GROTOWSKI J F, KROESE D P. Kernel density estimation via diffusion[J]. Annals of Statistics, 2010, 38 (5): 2916-2957.