基于内模控制理论的参数整定
2013-04-06王民涛谢克明
王民涛,谢克明
(1.中国平煤神马集团,河南平顶山467000;2.郑州电力高等专科学校,郑州450004)
1 内模控制理论的定义
内模控制理论的原理,源于20世纪90年代末期黑箱理论的深化,是以控制对象的结果反推实现条件的过程,并建立对应的数学模型,对结果进行预估,形成快速响应机制。
由于常规控制理论的局限,典型控制回路的组态与参数整定及使用效果不够理想,主要表现在整定周期长、抗干扰能力差等方面。针对这些不足,笔者在新建项目中,利用新颖的内模控制理论,成功地克服了以上问题,保证了生产系统的稳定和产品质量的提升。文中针对基于内模控制理论的典型控制回路的参数整定加以分析。
2 典型回路的基本控制方案
2.1 工艺要求
在某大型化工项目中,原料混合罐D160作为加氢反应器R310的给料缓冲,在整个生产过程中占有重要的地位。能否保证氢氧化钠(NaOH)、乙醇(EtOH)与己二腈(AND)以一定的比例进入D160,将直接影响到最终产品的质量。因此,工艺要求:
1)氢氧化钠流量qm2与己二腈流量qm1保持一定的比例关系。
2)乙醇流量qm3与qm1保持一定的比例关系。
3)D160的液位稳定在一定高度。
4)泵P164A及P164B都停时,己二腈、氢氧化钠、乙醇进料阀全关。
5)保证最终产品的浓缩生产稳定连续。
2.2 基本控制方案
根据上述工艺要求,采用两个单闭环比值调节系统及一个单回路调节系统,使qm2与qm1,qm3与qm1保持一定比例关系。双闭环比值调节回路如图1所示。
单回路调节系统通过控制己二腈进料阀控制D160液位的稳定,如图2所示。
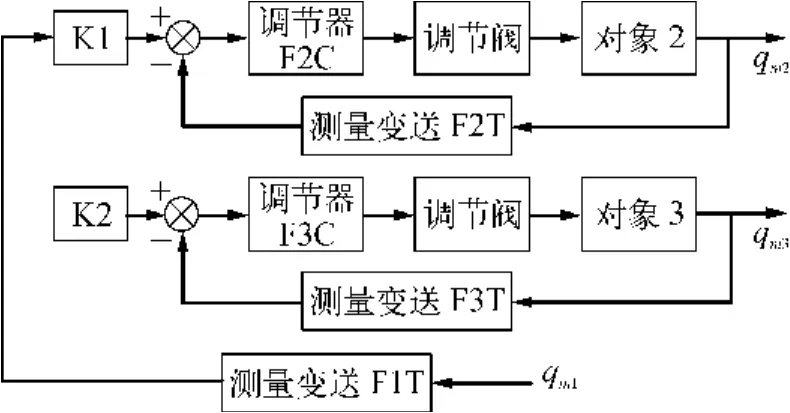
图1 双闭环比值调节回路示意

图2 液位闭环调节系统示意
3 控制回路调节器PID参数整定
调节器参数的整定是根据已定的控制方案确定调节器的最佳参数(比例度δ、积分时间TI及微分时间TD)值,使系统能获得好的调节质量。
在第一期装置中,由于PID参数的设置不是十分合理,控制效果较差,常需要人工干预。控制发散,操作人员常将控制器打到手动状态,使阀位的输出保持在一个定值,降低了自控率和控制效果。通常被控对象越复杂,控制器越常处于手动状态,基础PID回路参数整定不合理,最终产品的控制趋势常常出现不理想的状态,影响了产品质量和安全生产,同时也不利于节能降耗。
3.1 内模控制技术及其应用
3.1.1 PID整定过程
首先,按常规PID控制算法有以下3种类型:

其次,将以上PID控制的基本类型转化为替代模型,即先进控制模型和混合控制模型,根据内模控制理论,推导出更新型内模-PID整定方法,如图3所示。
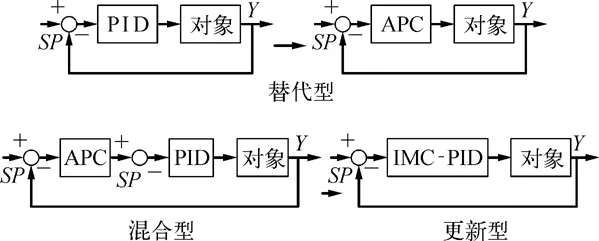
图3 内模-PID整定过程示意
内模-PID整定一般在先进控制站中实施,也可以直接放在操作站中,此时操作站可以称为先进控制站。在现场,内模-PID整定控制一般是在已经正常运行的DCS上添加先进控制的功能,为了现场的稳定操作、安全等原因,一般另辟一块区域运行内模-PID整定控制软件。
过程数据存储在趋势数据中,为了获得这些数据,该方案基于OPC(OLE for Process Contro1)接口标准,编写一个和集散系统进行数据交换的软件接口,并建立模型,将内模-PID整定控制运算后的结果,传给实时控制系统。最后,通过软件包模块确立控制器参数优化整定软件包,如图4所示。
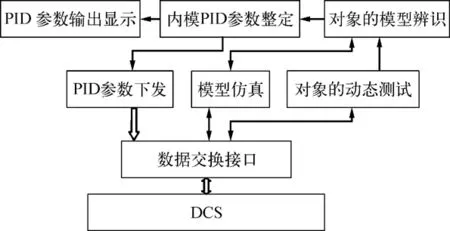
图4 控制器参数优化整定软件包
3.1.2 内模控制所需的物理环境
在该装置的DCS中,利用工程师站下装PID参数自整定软件包和数据接口软件包,即该工程师站既充当OPC服务器,又充当内模-PID整定控制站。
3.1.3 控制对象特性的获取方法
无论是闭环和开环控制回路均可进行辨识。辨识可以采用开环(控制器处于手动)阶跃输入的方式。在该装置中,由于回路数较多,PID调节器参数初始整定不良,一个回路的波动将导致其他回路受影响,甚至造成整个装置控制的不稳定。因此,新的控制方法一般采用开环辨识(有控制器存在),保证辨识信号对生产的影响最小。辨识输入信号为给定值的扰动,为了解决闭环可辨识性问题,选用求解速度快的随机数直接搜索算法,根据已知的控制器参数,求解出对象的特性。
该方法整定的PID参数具有解耦能力,即能够形成有效的大闭环回路、较强的扰动抑制功能,从而以运算的结果作为给定值,满足整个控制回路参数的自动调整。
该实例中,通过内模-PID整定后的参数值见表1所列。

表1 内模-PID整定后的参数值
4 效果分析
改进后的控制方案(相对于第一期装置),实际控制效果表明,可以保证装置控制的可靠性。采用先进内模控制理论组态和整定控制器的参数,响应速度快、超调小或无超调,抗干扰能力强,现场应用的效果如图5所示。
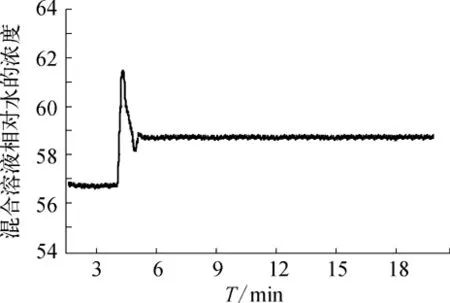
图5 内模理论应用效果示意
由图5中可以看出,完成一个调节周期不大于50 s,最大超调值不超过3%,具有较强的抗干扰能力。该较复杂的多控制回路中,各项性能指标已达到很好的程度。
[1] 高伟.计算机分散控制系统[M].武汉:华中科技大学出版社,2005:1-35.
[2] 解怀仁,杨彬彦.石油化工仪表控制系统选用手册[M].北京:中国石化出版社,2004:94-133.
[3] 王锦标.现场总线和现场总线控制系统[J].化工自动化及仪表,1997,(02):3-7.
[4] 龚成龙,丁兆奎.集散控制与现场控制的比较及对FCS技术的展望[J].淮海工学院学报,2000(03):37-40.
[5] 董武,戴毅.建筑工业自动化及仪表[M].北京:化学工业出版社,2003:67-98.
[6] 成玉清.DCS应用中的不足分析及对策浅论[J].自动化博览,2003(20):80-83.
[7] 王常力,廖道文.集散型控制系统的设计与应用[M].北京:清化大学出版社,1997:75-89.
[8] 陆德民,张振基,黄步余.石油化工自动控制设计手册[M].3版.北京:化学工业出版社,2000:678-1024.
[9] 王骥程.化工过程控制工程[M].北京:化学工业出版社,1991:210-257.
[10] 刘洋,王钦若.基于内模控制的PID参数整定及仿真[M].北京:化学工业出版社,2001:144-184.
