改进模糊自整定PID控制器及在GLCC液位控制中的应用
2013-04-06朱乐涛薛美盛
朱乐涛,薛美盛
(中国科学技术大学自动化系,合肥230026)
近年来,为适应国民经济、社会发展和人民生活对能源的需求以及应对能源日益紧缺、消费和需求量大幅攀升等问题,各国都加大了对石油和天然气资源的开发。在开采过程中,为确定各油井原油、天然气产量,了解地层油气含量及地层结构的变化,需要对油井产出液各相的体积流量或质量流量进行连续的计量并提供实时计量数据,从而优化生产参数,提高采收率。因此,油井井口的三相计量技术就显得尤为重要[1-2]。
气-液柱状旋流式分离器GLCC(Gas Liquid Cylindrical Cyclone)多相流计量系统[1-5]是针对上述问题而开发的代表性装置,结构如图1所示。通过使用具有特定结构的柱状旋流式分离器,气液相混合物由旋流转动产生的离心力和重力进行分离,形成一个倒圆锥的涡流面,进而实现油气井产出物的气液分离。由于装置体积小、集成化程度高、滞后时间短,微型GLCC多相流量计已广泛应用于陆上和海上平台油气产量的单井连续计量和分队连续计量。
GLCC多相流计量装置的性能依赖于气液分离效果,因而当油气井多相流量不稳定时,尤其在产生严重段塞流或井位切换情况下,气液相比率通常发生较大变化,导致GLCC分离器内压力和液位波动,造成气串液(gas carry-over)和(或)液串气(liquid carry-under)现象,严重影响分离器的分离效果,且可能导致流量计频繁卡堵和损坏,从而最终影响GLCC多相流量计量装置的有效运行[3,6-7]。因此,实现该类流量计量装置精确计量的关键是分离装置中气相压力和液相液位尽可能地保持恒定。文献[5]的研究指出气串液、液串气主要取决于GLCC分离装置中的液位,因而设计合适的控制策略保证GLCC中液位的稳定对整个计量的高效运行就尤为重要。
目前,对GLCC分离装置内部液位的控制主要是采用传统的固定参数的PID控制器进行控制[7-8]。传统的固定参数PID控制器能针对特定模型、特定性能指标整定得到较好的一组控制参数[9],却无法针对GLCC分离装置入口端多相流的变化而相应地改变控制器参数从而实现液位波动幅度的减小及波动时间的缩短。因此,为了达到更好的液位控制效果,研究具有自动调整能力的PID控制器就尤为关键。鉴于在先进的控制算法中模糊控制能根据控制系统的实际响应情况,运用模糊推理进行自动调整和决策[10-11],因而在研究GLCC液位控制中尝试采用将PID控制和模糊控制相结合的模糊自整定PID控制器进行控制,在此基础上针对控制器的初始参数选取提出了一种基于扰动下液位误差积分时间指标最优的参数选取方案,通过仿真验证控制性能的进一步改善。
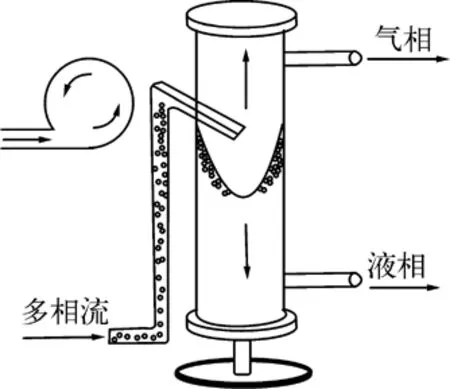
图1 简单的GLCC分离装置示意
1 GLCC液位控制模型及控制器参数选定
1.1 GLCC液位控制回路模型
文中对GLCC液位控制研究选用的模型对象为文献[8]中使用的GLCC分离装置,该模型对象主要由GLCC分离器、液位变送器、控制器、气动传输环节、液相调节阀等部分构成。建模时以稳态时GLCC分离装置中液位H的相对变化量作为输入,实际的液位变化量为输出,将入口端液相流速视为模型的扰动,整个系统的模型如图2所示。
图2中Gp为GLCC分离装置的开环传递函数,表达式为Gp
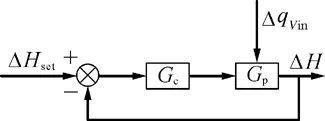
图2 GLCC液位控制回路结构示意
图2中,ΔHset为控制回路的输入设定液位与所要求稳定液位的相对值,在稳态时应为0;ΔH为液位变送器测量得到的实际液位与所要求稳定液位的相对值;ΔqVin为GLCC分离装置中入口端因气液相比率发生变化而造成的液相流的相对变化值,单位为m3/s;Gc为完成GLCC液位控制的PID控制器或模糊PID控制器(由于极端情况下出现的严重阻塞流,输入更接近于斜坡输入[8],所以模型中已含有积分项,但控制器的设计中积分环节仍需保留),在常规PID控制下,表达式为

式中:KP,KI,KD——比例系数、积分系数和微分系数。
1.2 常规PID控制器参数选定
由于在实际应用中,GLCC分离装置中的设定液位都保持恒定,模型框图中的ΔHset恒定为0,在进行控制器的设计时将模型框图进行变换,对ΔqVin-ΔH或ΔqVin-ΔqVout(ΔqVout为GLCC分离装置中出口端的液相流速)关系进行分析进而设计控制器。在文献[8]中,实现液位控制的PID控制器参数利用根轨迹法进行试探选取,得到3个参数依次为KP=4.387,KI=1.197,KD=3.989。而在本文的研究中,由于模糊PID控制器在实现控制时必须要有1组KP,KI,KD的初始常数值KP0,KI0,KD0。选取时依据模型中ΔqVin-ΔqVout关系曲线,利用工程上常用的Z-N整定法[9—11]整定得到1组初始化参数为KP0=1.296 0,KI0=0.683 5,KD0=0.614 3,作为后文中对模糊PID控制器及其优化改进研究中的初始参数。令ΔqVin为幅值等于2.8×10-3m3/s的阶跃扰动输入,在Matlab中仿真观察PID参数分别为KP=4.387,KI=1.197,KD=3.989和KP0=1.296 0,KI0=0.683 5,KD0=0.614 3下的ΔqVin-ΔqVout和ΔqVin-ΔH响应曲线,分别如图3和图4所示。

图3 两组不同PID参数下的出口端流速响应曲线
图3,图4中,曲线1表示经过Z-N整定得到的控制器作用下的ΔqVin-ΔqVout和ΔqVin-ΔH响应曲线;曲线2为引用文献中的一组参数得到的响应曲线。由于Z-N整定法是一种基于经验的常用于工程中的粗略方法,参数选取方法简单快捷,但通过2组曲线的比较,整定得到的控制器产生的响应输出超调较大,调节时间较长,直接应用于GLCC液位控制中效果很差。由于文中的研究主要改进之处在于对控制器的初始参数进行优化改进性能,因而对该组参数仍进行保留并在后文中在该组参数优化的基础上验证控制器性能的改进。
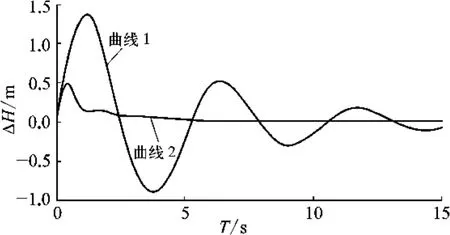
图4 两组不同PID参数下的液位响应曲线
2 模糊自整定PID控制器及其改进
2.1 模糊自整定PID控制器的原理及实现
在上文中已经指出,现有的针对GLCC液位控制选用的控制器为固定参数的PID控制器,对于入口端因多相流变化造成的液相流速扰动不能及时地在线调整而产生更优的控制信号,改善控制效果。考虑现代智能控制中的模糊控制策略能够进行模糊逻辑推理的特点,将其和传统的PID控制结合起来,构成模糊自整定PID控制器,对扰动作用下控制器的系数KP,KI,KD进行在线调整,以取得控制效果的改进,如图5所示。
图5中,KP,KI,KD分别为控制器的3个参数,e和ec为设定值和实际输出值的误差及导数并作为控制器中模糊推理部分的两个输入。在进行控制前先建立PID控制器3个参数的增量ΔKP,ΔKI,ΔKD与e和ec之间的关系表,开始控制后不断检测计算e和ec,通过模糊规则表推理计算对3个参数进行在线修改,产生更优的控制作用。
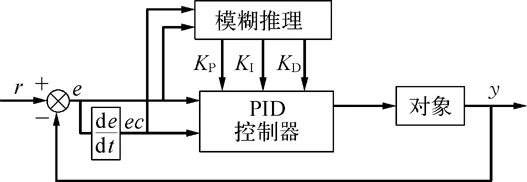
图5 模糊自整定PID参数控制系统
在进行模糊规则表的设计时将液位偏差e和误差变化ec的变化范围定义为模糊集上的论域{-3,-2,-1,0,1,2,3},模糊子集设置为{NB,NM,NS,ZO,PS,PM,PB},子集中的元素表示负大、负中、负小、零、正小、正中、正大,整定得到的参数值与初始值的关系为
根据常规PID控制器中KP,KI,KD3个参数对控制效果的不同作用[9],设计ΔKP,ΔKI,ΔKD的模糊规则表。
在Matlab中利用模糊控制工具箱实现该两输入三输出的模糊控制器,并在Simulink中完成模糊自整定PID控制器的搭建。
为了验证模糊自整定PID控制器对控制效果的改善,取文献[8]中参数KP=4.387,KI=1.197,KD=3.989作为初始化参数与该文献中采用的常规PID控制器控制效果进行比较,得到ΔqVin-ΔqVout和ΔqVin-ΔH响应曲线分别如图6,图7所示。
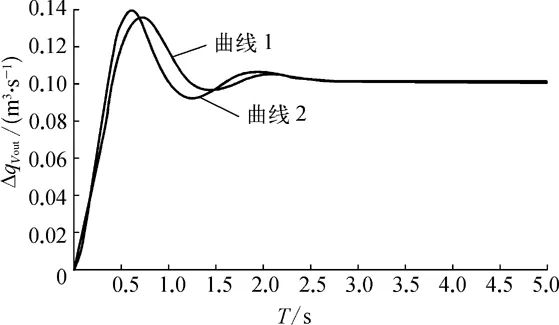
图6 常规PID和模糊PID控制的出口端流速响应
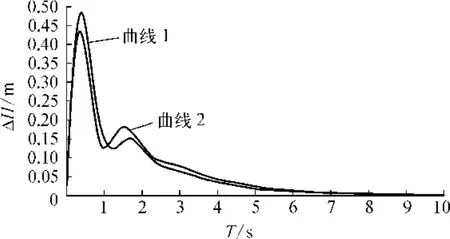
图7 常规PID和模糊PID控制的液位响应
图6,图7中,曲线1为常规PID控制下的响应曲线;曲线2为模糊自整定PID控制下的响应曲线。通过对比可以看出采用模糊自整定PID控制后由于参数能自适应调整,对于入口端2.5×10-3m3/s的扰动,出口端的液相流速比常规控制下能提前产生动作并且最大峰值得到提高,从而在扰动造成GLCC分离装置内液相体积增大后能加快排出液相流,使得液位波动的幅值也降低。
2.2 PID控制器的改进及仿真验证
在对模糊自整定PID控制器的设计和仿真中可以看出,每一步KP,KI,KD都是在初始值的基础上加上或减去一个增量调整得到,继而调节控制输出。模糊控制表的建立是为了更好地选取该增量,而另一方面初始值的选取是基础,对模糊自整定PID的控制效果的决定作用同样重要。在本文的改进中,分离效果的好坏取决于液位保持稳定的能力,而液位变化的程度可以用波动幅值H和波动时间T进行描述,因而在选取控制器的初始参数时,应满足使液位变化的程度最小(即最优)的条件,并在选取优化的目标函数时将H和T均考虑在内。考虑在一定的时间之后将GLCC分离装置内部的液位恒定在原来的设定值,也就是H能达到或趋近0,所以在选择优化的目标函数时取液位时间积分值为目标函数,积分后的结果为关于变量KP,KI,KD的函数,即F=F(KP,KI,KD),对该函数值进行最小化寻优,从而得到1组KP,KI,KD值。
相比原来设计控制器时需对控制器参数进行反复计算验证选取,利用目标函数优化的改进控制策略降低了对初始参数值的约束限制,使对初始参数值的要求变低,即便初始值的指标性能较差,但经过第一步的函数寻优得到结果后,进而用于模糊自整定PID控制器仍能取得满意的效果。
在具体实现时通过借助Matlab软件强大的图形数据交互功能,在Simulink中原有的s域模型框图的基础上将目标函数的时域形式进行拉氏变换,再借助Matlab中自带的最小化优化函数fminsearch(),寻优得到参数结果。
为了验证引入优化后对控制性能的改进,仍选取上文中的2组参数KP=4.387,KI=1.197,KD=3.989和KP0=1.296 0,KI0=0.683 5,KD0=0.614 3,其中KP,KI,KD保持不变,将KP0,KI0,KD0作为优化部分的初始化参数,按上述步骤对目标函数最优化得到1组新的参数KP1=9.706 4,KI1=4.209 7,KD1=6.126 2,将该组参数替换为模糊自整定PID控制器的初始参数,在ΔqVin=2.8×10-3m3/s的阶跃扰动下观察ΔqVin-ΔqVout和ΔqVin-ΔH响应曲线分别如图8,图9所示。
图8,图9中,曲线1为常规PID控制下的响应曲线;曲线2为在改进的模糊自整定PID控制器作用下的响应曲线。可以看出在图8中扰动加载后曲线2相比曲线1的ΔqVout快速增加,以使分离装置中多余的液相流尽可能快地排出;图9中模糊自整定PID作用下的曲线相比原来固定参数PID控制器作用下的曲线,液位变化的幅值大幅降低并且液位恢复稳定的时间也明显地减少。结合图3,图4不难看出引入模糊自整定PID控制器以及对GLCC液位波动指标函数的优化改进后,GLCC分离装置中液位控制性能得到了进一步的改进。
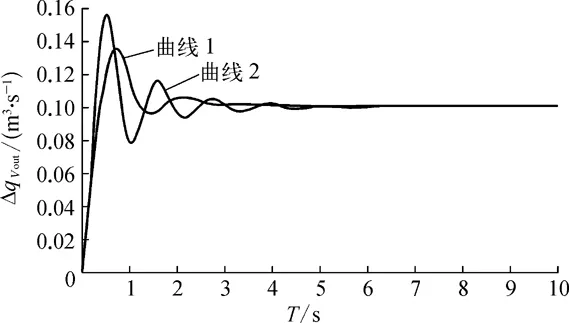
图8 常规PID和改进的模糊PID控制的出口端流速响应曲线

图9 常规PID和改进的模糊PID控制的液位响应曲线
另一方面,当扰动发生变化时由于模糊自整定PID控制器具有在线调整控制器参数的功能,因而相比参数取为优化值的固定参数PID控制器,液位响应曲线应同样得到进一步改善。因此,将扰动进一步加大为ΔqVin=6.44×10-3m3/s进行仿真验证,液位ΔH仿真结果如图10所示。
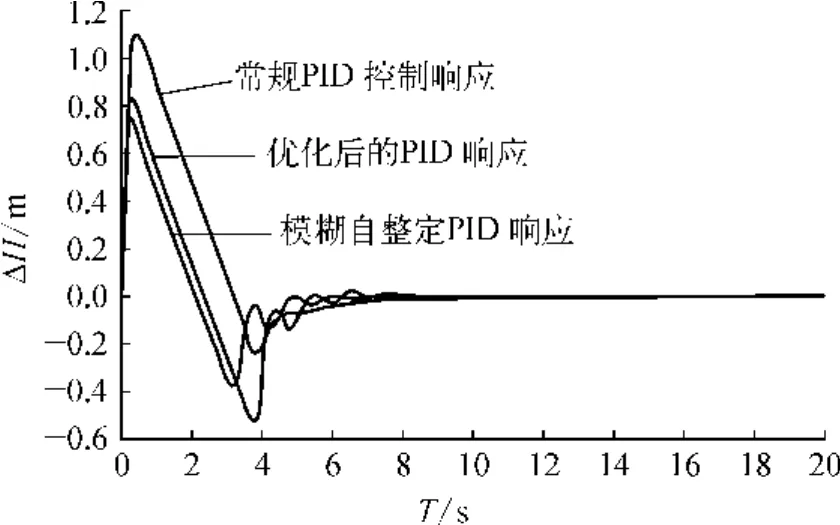
图10 扰动加剧后各个控制器作用下的液位响应曲线
由图10可以看出,当入口端液相流量发生剧烈变动,由原有的2.8×10-3m3/s增加到6.44× 10-3m3/s(增加130%),模糊自整定PID控制器使得液位波动的幅度最小,达到液位稳定的时间最短,使得GLCC分离装置中液位控制性能得到了进一步的改善。
3 结束语
针对GLCC分离装置中的液位控制,文中的研究中引入了模糊自整定PID控制器,并在此基础上提出了利用扰动下液位响应曲线建立优化目标函数对KP,KI,KD3个参数进行优化使得模糊自整定PID控制器得到了改进,对液位控制取得了较好的控制效果,并且在入口端扰动加剧时通过仿真验证了相比传统PID控制器对液位控制效果的改进。
文中研究采用的是工程上常用的Z-N整定法,参数计算简单易于得到。相比于理论计算取得的控制器参数,通过仿真验证了经过优化和模糊自整定后控制器的效果反而更好,因而该法也便于在工程上实现和应用。目前在对提升GLCC分离效果的研究中,只是对液位单变量进行了控制改进,而忽略了GLCC分离装置中压力回路,在进一步的研究中应引入多变量控制回路,以使GLCC分离效果得到更好的改进。
[1] 寇杰.柱状气液旋流分离器的研究现状及应用前景[J].石油机械,2006(04):71-73.
[2] 胡艳华,龙斌.小型柱式气液旋流分离器在海洋平台的应用前景分析[J].中国造船,2009(11):509-513.
[3] 寇杰,宫敬,曹学文.圆柱式气液旋流分离器的性能评价[J].中国石油大学学报(自然科学版),2008(08):99-102.
[4] 仇晨,刘培林,尹丰,等.一种新型的高效节能GLCC分离器在中海油的应用研究[J].中国海洋平台,2010(10):45-48.
[5] 王晓莉.GLCC多相流计量装置[J].计量技术,2005(04):32-33.
[6] 王晓莉.GLCC多相流计量装置用于单井计量[J].油气田地面工程,2005(04):37.
[7] 方再新,王连海.GLCC多相流计量系统优化控制方案设计及工程实现[J].石油化工自动化,2008,44(01):5-7.
[8] WANG S.Dynamic Simulation,Experimental Investigation and Control System Design of Gas-liquid Cylindrical Cyclone Separators[D].The University of Tulsa,2000.
[9] 金以慧.过程控制[M].北京:清华大学出版社,1993.
[10] ZIEGLER J G,NICHOLS N B.Optimum Settings for Automatic Controllers[J].Trans on American Society of Mechanical Engineering,1942,64(08):759-768.
[11] HANG C C,ASTROM K J,HO W K.Refine-ments of the Ziegler Nichols Tuning Formula[J].IEE Proceedings Control Theory and Applications,1991(02):111-118.
[12] 刘金琨.先进PID控制及其Matlab仿真[M].北京:电子工业出版社,2004.
[13] 张德丰.Matlab自动控制系统设计[M].北京:机械工业出版社,2010.
[14] 魏巍.Maltab控制工程工具箱技术手册[M].北京:国防工业出版社,2004.
