一种采用自夹紧模糊控制的缆索检测机器人设计
2013-03-31秦理程良伦
秦理,程良伦
(广东工业大学自动化学院,广东广州510006)
改革开放以来,斜拉索桥作为现代桥梁的新形式,在中国得到了广泛的应用,缆索作为斜拉桥的主要构件之一,造价占整座桥梁的25%~30%。20世纪80年代之后兴建起大批的斜拉桥,目前正在逐步进入老化期,由于拉索长期处于露天服役状态,经20来年风吹雨淋日晒,其聚乙烯护套会产生不同程度的硬化和开裂现象,从而使护套内的钢丝束发生腐蚀;另外,随机振动也会引起钢丝的磨损,这些都会严重影响拉索的使用寿命,给斜拉桥的正常使用埋下严重的隐患。
目前的缆索检测机器以电驱动式和气动蠕动式两种机器人为典型[1],爬行时需要施加一个夹紧力在滚动轮与缆索之间,夹紧力保证轮与缆索之间产生一个足够大的摩擦力,来克服自身重力、风力,保证爬升过程中不发生坠落或打滑。然而缆索的表面通常都涂有防止聚乙烯护套老化的防护漆,夹紧过度将会损坏防护漆并且使缆索产生变形,对缆索造成二次伤害[2]。斜拉桥缆索机器人设计的关键问题是:如何在轮与缆索之间施加一个大小合适的夹紧力,夹紧力过大会造成拉索损伤;夹紧力不够,机器人由于摩擦力不足很难运动,在斜缆索上容易晃动,当检测机器人沿较大倾斜度的缆索爬升时,必须在缆索表面施加较大的夹紧力,以保证与缆索之间产生的摩擦力足以克服自重、负载及风力等而不下落或打滑。目前可查的几款机器人都是采用弹簧施压的方式产生夹紧力,该夹紧力均按机器人垂直状态的最大力进行设计,不能根据所攀爬的缆索状态自动进行调整,这显然对于减少机器人爬行的二次损坏和合理选用电机功率将产生重大影响[3],同时结构复杂,体积庞大,质量太大,从而给机器人的驱动、控制、安全保护带来一系列的问题。
针对以上不足,作者在改进现有缆索机器人结构设计之上,设计了一种带自夹紧执行机构的缆索机器人,能根据缆索状态进行夹紧力的自适应模糊控制。根据打滑检测器对爬行状态进行判断,气动夹紧装置的夹紧壁视需求以最适宜的夹紧力对缆索进行夹持,可实现只用一个检测机器人就能检测同一座斜拉桥上所有直径的缆索。自夹紧功能的实现对于缆索机器人的结构改进和保护缆索免受检测二次伤害,将具有积极的意义[4]。
1 自夹紧缆索机器人的系统设计
针对一款电驱动式缆索机器人进行自夹紧设计,机器人由主从动轮、驱动电机、传动系统、气动夹紧装置、辅助夹紧弹簧和连接件组成。驱动轮选择有较大摩擦因数的橡胶材料做成,能与整个缆索圆周表面饱满接触。整个机器人结构较紧凑、具有较高的机动能力,机器人外部机械结构如图1所示。
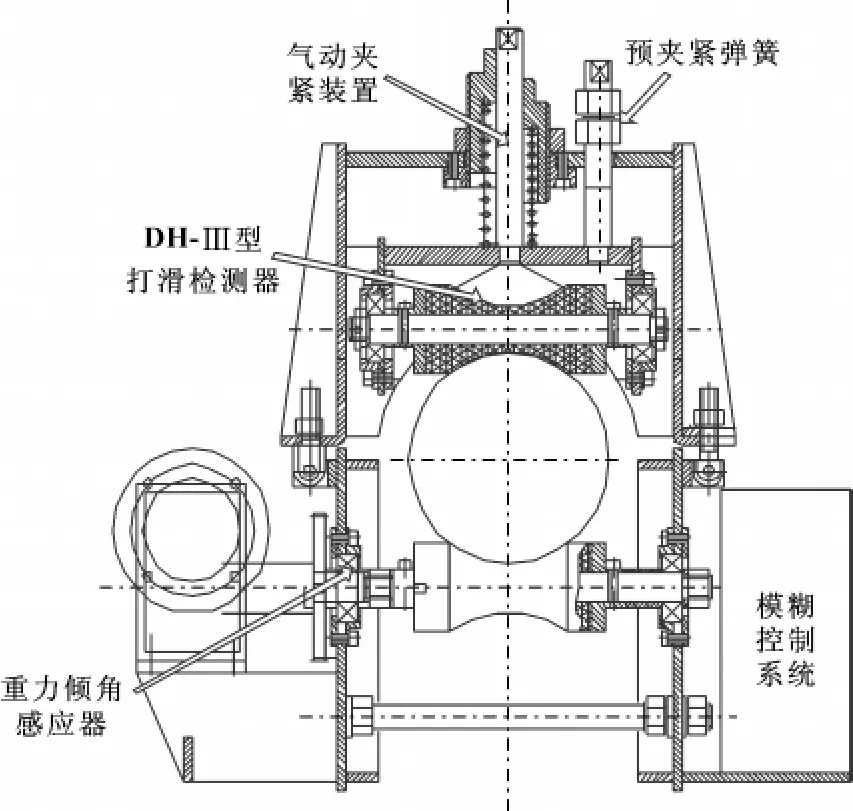
图1 机器人外部机械结构图
夹紧机构包括辅助夹紧和模糊控制夹紧:辅助夹紧装置的作用是将机器人安装到缆索上后,提供一个压紧力,使机器人附着于缆索表面,处于临界平衡状态;辅助夹紧装置中,由50CrVA弹簧钢制作成压缩弹簧,弹簧上端装有预紧螺母,可以调整弹簧提供给橡胶轮的预压力大小,同时夹紧弹簧上还装有限位刚性部件,限制缆索的最大检测直径。模糊控制夹紧的执行机构采用气动装置,在模糊控制器下达指令后,气压泵驱动压杆向下运动,压杆可以在气缸内自动伸缩,夹紧触头实现对橡胶轮依照给定力进行夹持。
机器人安装到斜缆索上后,主辅夹紧机构共同施加夹紧力,将上下滚轮紧压于斜拉桥缆索上。夹紧力合力的大小决定了整套装置的驱动能力,在足够的摩擦力作用下,机器人紧紧贴合在缆索上,在驱动电机的带动下上行与下行[5]。
2 缆索检测机器人自适应模型的建立
将机器人安装到缆索上后,必须把辅助夹紧弹簧调整到合适位置,使机器人处于临界平衡状态,此时缆索机器人的自重全部落在缆索上方的轮子上,如图2所示。作者对其进行受力分析,机器人受斜面法线方向的力N是重力G的法向分量和预夹紧力FN之和即:N=FN+G·cosα,α为缆索的倾斜角 (0~ 90°)。沿切线方向向上的摩擦力F与重力G的切向分量彼此平衡,有G·sinα=μN=F,μ为滚轮和缆索表面的摩擦因数。此时
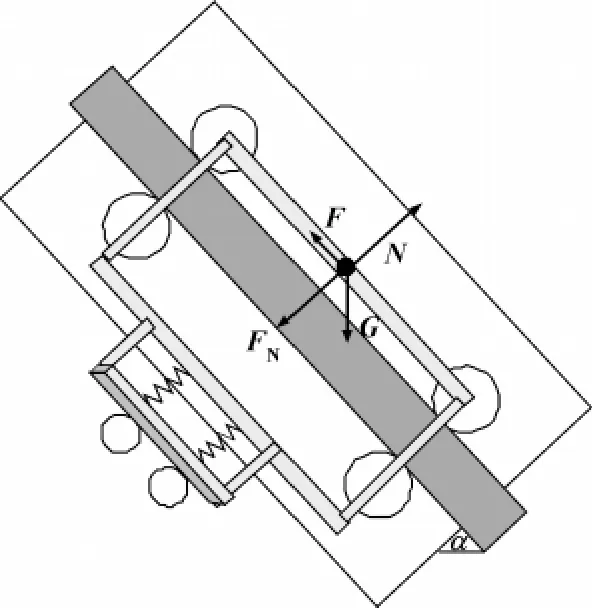
图2 机器人辅助夹紧力分析
在机器人正常运动时,辅助夹紧和模糊控制夹紧装置共同起作用,假设缆索机器人处在匀速运动状态,对其进行受力分析。为使分析简单明了,不考虑各构件质量及弹性变形,将机器人各构成部分按功能与布局进行简化,形成图3所示简化模型[6]。其中G1,G2,G3,G4,Ge,Gf为简化后各部分质点;N1,N2,N3,N4为缆索各个轮的弹力;f1、f2、f3、f4为缆索表面对各个滚轮的摩擦力[7]。

图3 机器人简化模型
根据静力学平衡方程,有:
如图3所示,以主动轮和缆索的接触点A为支点,用质点分析法建立力矩平衡方程,且设d为缆索直径;μ为滚轮与缆索表面摩擦因数;L为图中质点e、f到缆索表面距离。由动力矩和阻力矩平衡,有下式:


由于N1<<N2,故
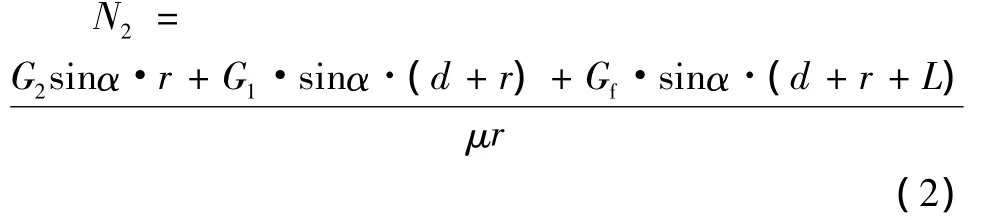
由于机器人上下结构具有对称性,以接触点B为支点,得出N4亦同。
对式 (2)进行分析,由于同一根缆索倾斜角α、缆索半径d是常量,且机器人的轮半径r、质点f到缆索的距离L都恒定,唯一不定因素是动摩擦因数μ。机器人在检测作业时必须经过缆索表面的导流线和一些产生锈蚀的凹凸槽,动摩擦因数μ是一个变化值。因为不能直接测量μ,作者采用DH-III型打滑检测器。打滑检测器附带一个触轮随同机器人在缆索上同步滚动,触轮带动检测器内传动轴,轴连接的轮片切割光电信号,传感头再把所检测的光电信号变成脉冲信号,送入89C51单片机在单位时间内计数,然后同电机编码器反馈的脉冲信号相比较,做出大于、等于或小于的判断。如果触轮测得的脉冲信号与编码器反馈的脉冲信号不同步并低于反馈脉冲时,说明机器人滚轮打滑,此时模糊控制器发出指令,气动夹紧装置工作,增大夹紧力。
3 自夹紧模糊控制模型
(1)输入输出量的确定
从精度和速度两方面考虑,采用触轮脉冲信号与编码器脉冲信号的偏差和偏差变化率两个变量作为输入。
两输入单输出模糊控制器基本原理如图4所示,通过比较电机编码器反馈的脉冲信号和打滑检测器检测的脉冲信号,将其差值R和差值的变化率ΔR送入模糊控制器进行模糊运算,再经过解模糊得出所需压紧力值,向缆索检测机器人气动夹紧执行机构发出动作指令。

图4 二输入单输出模糊控制原理图
根据缆索检测机器人自适应模型的特点,模糊控制器采用两输入单输出的控制方式,即读取R、ΔR两个变量数据作为模糊控制器的输入量。
(2)模糊化
取5个模糊子集来描述R、ΔR两个变量,取5个模糊子集为:NB(负大),NS(负小),ZE (零),PS(正小),PB(正大)。并把它们的论域化为7个等级 (-3,-2,-1,0,1,2,3),模糊子集的隶属函数选为三角形,模糊集合的隶属函数分布在论域 (-3,-2,-1,0,1,2,3)上。

图5 输入变量R、ΔR隶属函数
在两输入单输出控制方式中,采用的控制规则是“if A and B then C”,因此模糊关系矩阵Q可表示为

其中:A为电机编码器反馈的脉冲信号和打滑检测器检测的脉冲差值R;
B为电机编码器反馈的脉冲信号和打滑检测器检测的脉冲差值的变化率ΔR。
那么任一状态下的气动夹紧装置压紧力模糊值可表示为

式中:C为所需的气动夹紧装置压紧力值。
根据实际情况,可以先得出模糊关系矩阵Q,见表,再由式 (4)算出某一状态下的气动夹紧装置压紧力模糊值C,最后根据C值确定气动夹紧装置的工作状态S。

表1 气动夹紧装置压紧力模糊规则表
(3)气动夹紧装置工作状态的确定
在实际爬杆机器人系统中,气动夹紧装置采用的是活塞式结构,可以提供较大的推力。按照实际夹紧的需要可将输出推力分为很高、高、中高、中、中低、低挡。
根据实验可确定:当脉冲偏差为0≤C≤0.15,时,用低压力挡;当脉冲偏差为0.15≤C≤0.3时,用中低压力挡;当脉冲偏差为0.3≤C≤0.45,用中压力挡;当脉冲偏差为0.45≤C≤0.6,用中高压力挡;当脉冲偏差为0.6≤C≤0.75,用高压力挡;当脉冲偏差为0.75≤C≤1用很高压力挡。
由此可得到气动夹紧装置的工作状态,如表2所示。

表2 气动夹紧装置的工作状态
4 实地测试
对缆索检测机器人在不同倾角条件下进行测试,在试验架倾角为30°~90°时,气动夹紧装置输出的夹紧力随倾斜角度不同变化,机器人在实验过程中爬行稳定,符合模糊控制模型的预期结果,如图6所示。
在进行多次的地面试验之后,在惠州合生大桥上实地测试该样机。在带有导流槽的缆索上反复进行长距离爬升试验,共测试12根不同直径、倾斜角的缆索,结果证实:带自适应夹紧装置的检测机器人爬升平稳,在缆索上基本没有发生相对旋转,经多次往返运动没有对缆索表面的聚乙烯护套造成损伤,如图7所示。

图7 缆索机器人实地测试
5 小结
斜拉桥拉索机器人设计的关键问题是使机器人获得对缆索的夹紧力,夹紧力过大会造成对拉索的二次损伤;夹紧力不够,机器人不能实现爬行。人为施加夹紧力一般都是按照检测机器人在垂直状态爬行的最大力施加,不能适应拉索不同倾角和绕度的变化,过大的夹紧力容易给缆索造成二次伤害,同时也给机器人的驱动、控制、安全保护带来一系列的问题。这也是虽然国内外针对拉索检测机器人开展的研究不少,但实用商品化的产品不多的一个重要原因[8]。
作者在对缆索检测机器人进行分析的基础上,提出一种斜缆索检测机器人自夹紧模糊控制方案,可根据缆索机器人自身重力与缆索状态进行模糊控制,根据不同的缆索直径,调节夹紧弹簧的伸缩对缆索进行夹持,提供合适的夹紧力,可实现只用一个检测机器人就能检测同一座斜拉桥上所有不同直径的缆索。
【1】袁建明,武新军,康宜华,等.可重构斜拉索磁性无损检测机器人技术研究[J].武汉理工大学学报:交通科学与工程版,2008,32(3):442-445.
【2】王亚斌,周忆.一种轻型斜拉桥缆索检测机器人的结构与动力学分析[J].机械与电子,2008(1):48-50.
【3】郑李明,王兴松.斜拉桥拉索检测机器人控制系统设计[J].电子机械工程,2008,24(6):57-60.
【4】柳忠彬,周忆.斜拉桥拉索检测机器人的自适应研究[J].机械与电子,2009(12):48-51.
【5】罗均.缆索维护机器人系统的研制[J].上海交通大学学报,2000,34(3):360-362.
【6】张家梁.气动蠕动式缆索维护机器人的研制[J].机器人,2002,22(9):397-401.
【7】OH J K,LEE A Y,OH S M,et al.Design and Control of Bridge Inspection Robot System[C]//IEEE Int Conf on Mechatronics and Automation,2007:3634-3639.
【8】XU F,WANG X.Design and Experiments on a New Wheelbased Cable Climbing Robot[C]//IEEE/ASME International Conference on Advanced Intelligent Mechatronics,2008:418-423.
