Stewart单三角平台的机构参数标定
2013-03-31柴保明王远东琚斌峰郭新宇华龙
柴保明,王远东,琚斌峰,郭新宇,华龙
(河北工程大学机电工程学院,河北邯郸056038)
精度是评价机器人性能的一项重要指标,也是目前机器人研究领域尚未妥善解决的问题之一。提高并联机器人的精度具体有两种实现手段:一是直接提高机械零件的加工精度、安装精度和表面质量;二是采用参数标定来识别并联机构运动学模型中的关键参数。第一种方法成本巨大且缺乏可操作性;而第二种方法只需要对部分构件按照普通精度要求进行机加工,在安装结束后通过运动学模型进行更精准的描述,与第一种方法方法相比,参数标定以其低成本和高效性的特点成为工程界所普遍采用的方法,并成为研究热点。
在国内外,SOONS[1]提出了一种基于最小二乘法的标定算法。MASORY等[2]提出并研究了Stewart并联机器人的简化模型,研究其运动学精度问题,最后给出了标定的些许基础结论。KHALIL等[3]在WAMPLER等研究的基础上,提出了仅约束机构支链而不往支链上安装附加传感器的一种标定方法。高猛[4]研究了分步标定法和误差建模法。
由于以上列举的方法存在一些不适合于Stewart单三角平台并联机构精度标定的缺点,如:标定成本高,求解过程复杂等,故作者在研究多个有关机器人文献资料的基础上提出了一种新的方法——基于广义力平衡原理的精度标定。
1 误差分析与其对Jacobian矩阵的影响
文献[5]提出了Stewart单三角并联机构,其简化误差模型如图1所示。装配工艺的改善、现代机加工方法的改进,传感器在现代工业中的大量应用,都使得简化模型成为影响着整个并联机器人位姿误差的主要因素,运动学模型的每一参数都会影响机构终端的位姿。在模型中常常忽略支链移动副和支链两端铰链带来的制造误差,故误差即它们的安装误差 (见图2)之和,这些误差共33个误差量。
由于Stewart单三角平台的Jacobian矩阵与操作空间运动存在着某种线性映射关系,Jacobian矩阵与机构的6个支链以及末端执行器 (动平台)的运动速度无关,而仅取决于该机构的6个支链以及末端执行器 (动平台)位形,所以从整个机构来分析,Jacobian矩阵误差囊括了所有的机构误差信息。

图1 Stewart单三角机构
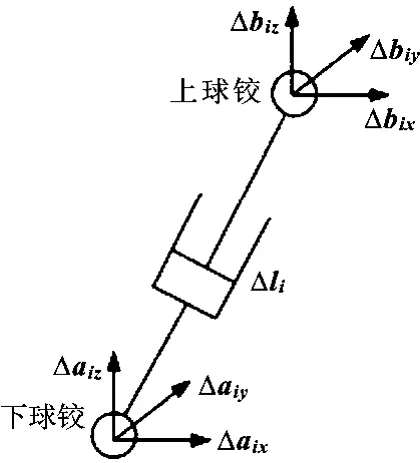
图2 Stewart单三角机构支链的7项误差
2 机构标定原理
基于文献中影响系数与Jacobian矩阵的对偶关系[5],故存在

式中:li是该机构中第i支支链的杆长,i=1,2,3,4,5,6;bi为机构上平台铰链点的空间坐标;ai为机构下平台铰链点的空间坐标。
由公式(2)可知,GFf的参数中含有各铰链点的坐标。假设:
(1)以上平台球铰所在的平面为基准坐标面,则空间坐标aix等于0,坐标差Δaix也等于0;
(2)通过测量直接标定出在机构中实际的铰链间距离Δli。
误差模型简化后剩余了30个机构运动参数,它们可以通过实验标定出的一阶静力影响系数GFf来求解:
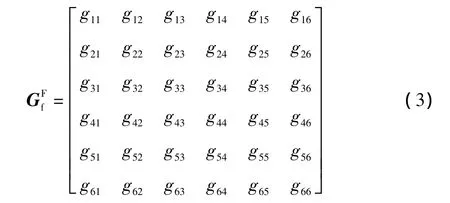
联立式(2)和式(3)可求得30个无关方程组的解析式如下:

计算以上各个参数 aix、aiy、bix、biy、biz,即为剩余参数的标定值。很显然:标定的关键在于标定一阶静力影响系数矩阵。
根据文献[4]中的螺旋理论,对于Stewart单三角平台机构,在其位姿固定时,欲求解其机构的螺旋方程必须考虑上平台的平衡。因为支链6个移动副的螺旋之和与机构末端输出的广义6维力相平衡,故可以得到其相应的螺旋方程:

式中:fi为第i支杆受到的轴向力;
Si为第i支杆轴线的单位线矢;
R为机构末端输出力的主矢量;
M则为机构动平台对固定坐标原点的主矩阵。存在矩阵平衡方程:

4 标定实验及其结果分析
标定实验设备如图3所示,该实验设备是由广义力加载测量仪器以及6-DOF电液伺服平台组成。
实验中,初始选取广义力加载精度为0.08级,支链单缸上安装的力传感器精度置为0.1级,把光栅尺的测量精度置为0.05 mm。整个实验系统通过编程语言的开发环境LabVIEW的测量模块作采样和记录,并调用数学软件Matlab内多元函数模块中的最小二乘法拟合子程序来对动平台进行现场标定。

图3 标定加载实验设备
4.1 广义力加载的选取
由于实验设备传感器的某些通道在实验结果输出测量值时会存在随机误差,考虑到误差的干涉,该实验设定的标定加载矢量数目大于6。而对于不存在必然关系的标定加载矢量,它们的选取会影响静力影响系数的值。故应取平台的外加载力向量矩阵为次正交矩阵,从而为机构获得更高更准的标定精度。
因为机构中各个铰链之间存在必然的静摩擦,摩擦就会干涉到铰链上单杠的受力,所以为了减小测量误差,应使铰链副光滑且应施加一定的预载荷,从而抵消最大静摩擦力的影响;另外,可以利用在实验过程中测出的两组单缸力来抵消静摩擦力。

4.2 实验结果
预置平台的初始参数:机构上平台铰链点的可达半径 R1=0.45 m,每两个相邻铰链的夹角 θ1= 28.5°;机构下平台铰链点的可达半径R0=0.6 m,每两个相邻铰链的夹角θ0=28.5°;两平台垂直方向上相距H=1.6 m。最终得到标定结果如下:
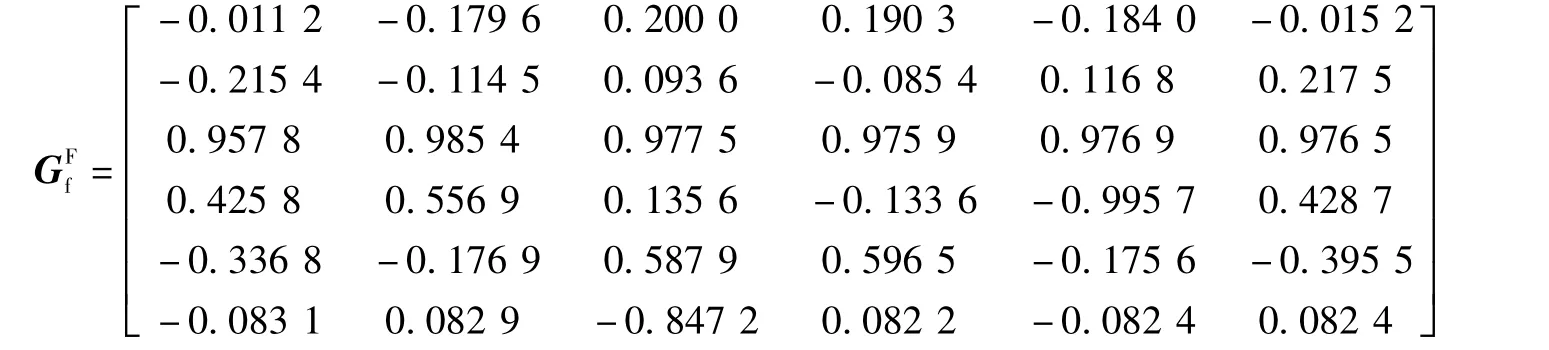
将以上数据代入式 (4)即可得到表1。

表1 平台理论参数与标定值的误差分析
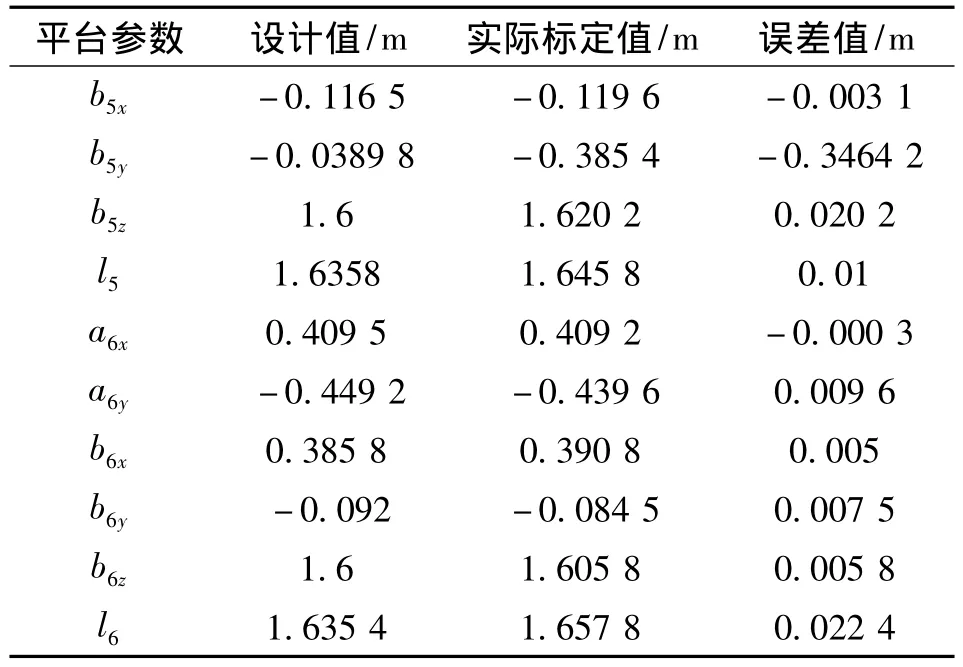
续表1
5 结论
(1)标定模型能够反映Stewart单三角并联机构运动学精度的误差源,从而可以消除某些测量误差。
(2)通过实验标定出平台参数,实验结果证明了该标定方法可以有效地提高平台的定位精度。
(3)由于基座球铰存在同面性,故实验应尽量保证基座球铰的安装性良好,从而可以增强该方法的适用性。
(4)实验表明基于广义平衡原理Stewart单三角平台机构的标定方法完全适合于并联机构参数的标定。这结论对同类并联机构的相关研究和工程实践具有重要意义。
【1】SOONS J A.On the Geometric and Thermal Error of a Hexapod Machine Tool[C]//Proc.of CIRP,1999:151-169.
【2】MASORY O,WANG J,ZHUANG H.On the Accuracyof a Stewart Platform.Part II.Kinematic Calibration andcompensation[C]//Proceedings of the 1993 IEEE International Conference on Robotics and Automation,Applied Automatic Control Principles and ApplicationsDivision,May 2-6,1993,Atlanta,GA,USA.Piscataway,NJ:IEEE,1993: 725-731.
【3】KHALIL W,BESNARD S.Self Calibration of Stewart-Gough Parallel Robots Without Extrasensors[J].IEEE Trans.on Robotics and Automation,1999,15(6):1118-1121.
【4】高猛.少自由度并联机构运动学标定[D].北京:清华大学,2005.
【5】陈雄标,袁哲梭.机器人用六维腕力传感器标定研究[J].机器人,1997,19(1):7-11.
【6】刘大炜,王立平,关立文.一个特殊3自由度并联机构的精度分析及标定[J].机械工程学报,2010,46(9):46-52.
【7】黄真.空间机构学[M].北京:机械工业出版社,1991.
【8】代小林,丛大成,韩俊伟,等.基于光学坐标测量机的STEWART机构标定研究[J].机床与液压,2007,35 (8):45-46.
