基于模糊自适应PID控制器的起重机精确定位技术研究
2013-03-31赵典强宝民刘陈
赵典,强宝民,刘陈
(第二炮兵工程大学202教研室,陕西西安710025)
起重机作为一种运输机械被广泛应用于港口码头、冶金工业、建筑工程等方面。随着现代工业生产规模的不断扩大,工业生产对起重机的定位精度要求越来越高,研究起重机的精确定位技术已成为提高工业生产效率的重要途径。当前我国起重机定位控制系统大多采用编码器作为位置检测装置,与人工目测指挥相配合,当起重机制动时,起重机的轮轴会发生打滑现象,而编码器的数值却不会发生变化,不能准确地检测起重机的位置,因此无法对起重机进行精确定位,并且使用一段时间后需要重新检定。
作者针对传统定位系统中存在的问题,结合实验室项目的开展,研究起重机的精确定位技术。首先建立系统中的变频器、交流异步电机以及检测装置的数学模型,推导出整个系统的传递函数;其次,结合模糊控制策略和PID控制方法设计了模糊自适应PID控制器,实现系统的闭环控制;最后,在MATLAB Simulink环境中进行仿真,通过仿真结果与实验结果的对比,检验此方法的可行性。
1 系统数学模型的建立
1.1 变频器环节
变频器环节的输入为控制电压,输出为定子侧电压和频率,变频器的输入电压uc范围是010 V,相应的变频器的输出频率即交流异步电机定子侧的电压的频率f为050 Hz。与交流异步电机相比,变频器的时间常数比较小,可以忽略变频器的动态响应过程,此时可以将变频器看为比例环节,其比例关系为:

式中:K1为电压频率转换系数,变频器的输入电压uc为010 V,输出频率f为050 Hz,所以得到电压频率转换系数K1=5。
当交流异步电机处于稳态时,定子每相电压与每相感应电动势的关系为:

Rs为定子每相绕组电阻。

f1为定子侧电压频率;
Lm为定转子互感;
Ls为定子自感;
当定子电势较高时,可忽略定子绕组中的漏阻抗压降,此时定子电压近似等于定子电势,但当定子电压频率f1较低时,定子的感应电动势变小,而项则基本不变,定子绕组中的漏阻抗压降此时不能忽略,定子电压与定子感应电势已经不再近似相等。为了使恒压频比控制方式在低频时能够应用,往往采用定子电压补偿措施,即在低频时适当提高定子电压以补偿定子绕组中的漏阻抗压降的影响。补偿后的特性曲线如图1所示。

图1 恒压频比控制特性曲线
根据不同的实际情况可以设置不同的补偿电压,设补偿电压为U0,则定子电压U1与变频器的输出频率f的关系为:

当忽略低频定子补偿电压时,则有:

式(1)、(3)、(4)即为变频器的数学模型。
1.2 交流异步电机环节
交流异步电机是一个高阶次、非线性、强耦合的多变量系统,但与机械传动的动态过程相比,电机的电磁瞬变过程非常短暂,基本可以忽略不计,交流异步电机的电磁转矩Te为:

式中:np为交流异步电机极对数;
U1为定子每相电压;
ω1为交流异步电机的同步角速度;
Rs为定子电阻;
Rr为转子电阻;
s为交流异步电机的转差率。
当交流异步电机处于额定工作状态时,电机转速接近同步转速,电机转差率很小,并且 Rs与ω1(L1+L2)为同一数量级,所以Rs>>Rrs≈Rrω1(L1+L2),则电机的电磁转矩可化简为:

将转差率s=(n1-n)/n1(n为电机的实际转速),电机的同步转速n1=60 f/np代入上式得:
为便于计算,简化变频器模型,忽略定子的补偿电压,此时电磁转矩为:

对于恒转矩负载,则电机的运动方程为:

式中:TL为负载转矩;
J为转动惯量;
ω为电机转速。
将式(6)代入式(7)后求拉氏变换得:

1.3 减速器环节
交流异步电机的转轴通过减速器与起重机的轮轴相连接,在系统建模中,可视为比例环节,其数学模型为:

式中:n为电机的转速;
n1为车轮的转速。
1.4 检测装置环节
该系统的检测装置采用拉线式位移传感器,其输入为起重机的位置信号,输出为电压模拟量信号,可近似视为比例环节,因此,其数学模型可表示为:

式中:Kf为位移传感器的增益;
Uf为反馈电压;
y为起重机的位移。
根据上述各环节的数学模型可得系统数学模型为:
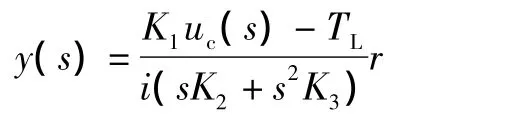
式中:r为起重机车轮半径。
2 模糊自适应PID控制器的设计
2.1 模糊自适应PID控制器的思想
模糊自适应PID控制器又称模糊PID参数自整定控制器,是将PID控制器和模糊控制器串联在一起,以系统给定值和控制对象实际值的偏差e和偏差率ec作为模糊控制器和PID控制器的输入,用模糊控制器实时调整PID的控制参量KP、KI、KD。该控制方式实时性强,控制精度高,不会出现常规PID控制器系统超调、易振荡的现象。其控制原理图如图2所示。
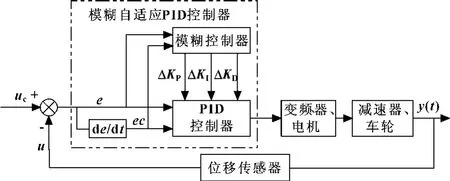
图2 模糊自适应PID控制器原理图
在模糊自适应PID控制器中,3个控制参数对系统运行状态的影响各不相同,所有的PID控制器对控制系统的校正都是建立在3个控制参数的基础上;模糊控制器的作用是根据起重机的运行状态实时修改PID的3个控制参数即KP、KI、KD,使系统具有良好的动、静态性能。
2.2 模糊自适应PID控制器的设计
取系统中变频器的输入信号和反馈信号的误差e及其变化ec作为模糊控制器的两个输入变量,输出变量为PID控制参数的修正量ΔKP、ΔKI、ΔKD。表1给出模糊自适应PID控制器的各变量。

表1 模糊自适应PID控制器设计表
根据模糊控制规则建立的基本思想和控制过程中系统的实际情况,采用经验归纳法和根据对手工操作系统的测量生成控制规则相结合的方法,可得适合该系统的模糊控制规则。其语言推理形式可表示为:
如E=Ei,EC=ECj,则U=Uij(i=1,2…,m; j=1,2,…,n)
其中:Ei、ECj、Uij分别是定义在E、EC上的模糊集。由此得到的ΔKP的模糊控制规则表如表2所示,限于篇幅原因,不再给出ΔKI、ΔKD的模糊控制规则表。

表2 ΔKP的模糊控制规则表
通过模糊控制得到的只是PID控制器中3个参数的修正量ΔKP、ΔKI、ΔKD,还必须将其与初始参数KP0、KI0、KD0合成,才能对系统性能进行调节。参数合成公式为:

式中:KP、KI、KD为PID控制3个参数的取值;
KP0、KI0、KD0为PID控制3个参数的初始值;
ΔKP、ΔKI和ΔKD为3个参数的修正值。
3 系统的仿真分析与实验验证
根据手册得到电机的参数为:定子电阻 Rs= 3.712 Ω,转子电阻Rr=2.789 Ω,定转子互感Lm= 0.295 H,定子自感 Ls=0.311 H,转子自感 Lr= 0.311 H,极对数np=2,转动惯量J=1 kg·m2。
模糊自适应PID控制器的Simulink仿真模块如图3所示。

图3 模糊自适应PID控制器的Simulink仿真模块
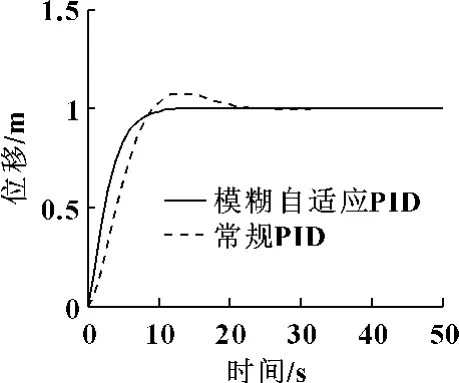
图4 系统的阶跃响应仿真曲线
对系统输入阶跃响应信号,得到的系统在模糊自适应PID控制器和常规PID控制器作用下的响应曲线如图4所示。
由仿真结果可以看出:系统采用常规PID控制器时,响应速度较慢,在t=25 s之后系统才趋于稳定状态,并且系统有较大的超调量,此时需要反转电机才能使系统位于设定的位置,不利于系统的稳定;采用模糊自适应PID控制器时,响应速度快,在t=10 s左右系统已经处于稳定状态,并且几乎没有超调。在该系统中,模糊自适应PID的控制效果要远好于常规PID的控制效果,大大增强了系统的鲁棒性。

图5 系统的阶跃响应实验曲线
为了验证模糊自适应PID控制器实际的控制效果,在试验台上进行实验。经过多次重复实验发现,当e和ec量化因子K1= 2,K2=2.3,ΔKP、ΔKI和ΔKD的比例因子分别为K3=12,K4=5,K5= 14时,模糊自适应PID控制器的控制效果最好。图5给出了位移指令为1 m时系统采用模糊自适应PID控制器的阶跃响应实验曲线与仿真曲线。
由系统的实验曲线可以看出:系统在t=11 s左右时有轻微的超调,但对系统的影响不大,系统稳定时的位移为1.006 m,即该系统的定位误差为6 mm。在仿真曲线中,由于控制器的参数是由实验确定的,并非仿真效果最好时的参数,其仿真结果稍有不同,响应速度稍慢。仿真曲线与实验曲线比较相近,能够较好地反映系统的实验结果,证明了系统模型的正确性和模糊自适应PID控制器设计的合理性。
4 结论
针对起重机的精确定位技术,建立了系统各环节的数学模型,推导出其传递函数,并设计了应用于该系统的模糊自适应PID控制器。在Simulik环境中,对系统采用模糊自适应PID控制器和常规PID控制器分别进行仿真,结果表明:作者设计的模糊自适应PID控制器控制性能更优越。最后通过实验结果与仿真结果的对比,证明了该系统数学模型的正确性和控制器设计的合理性,进一步说明了该方法的可行性。
【1】陶永华.新型PID控制及其应用[M].北京:机械工业出版社,2005.
【2】曾光其,胡均安.模糊控制理论与工程应用[M].武汉:华中科技大学出版社,2006.
【3】赵鑫.基于变频技术的高温液压流量控制系统[D].北京:北京交通大学,2010.
【4】徐沪萍,鲁凯生.基于模糊PID控制器的门式起重机大车定位控制系统研究[J].船海工程,2011(3):105-107.
【5】张国良.模糊控制及其MATLAB应用[M].西安:西安交通大学出版社,2002.
