基于多传感器的超高压输电线路巡检机器人越障控制
2013-03-31宋树伟阮毅李正
宋树伟,阮毅,李正
(上海大学机电工程与自动化学院,上海200072)
架空高压输电线路长距离输送电力能有效地降低输送电力时的损耗,是我国长距离传输电力的主要方式。它安全可靠地运行是国家经济稳定发展和人民正常生活的可靠保障。但架空高压输电线路的主要设备输电线、杆塔等长期暴露在空气中,在自然因素、持续张力和材料老化等的影响下,输电线路势必产生各种故障。若不能及时发现和修复,将造成严重的停电事故和人身生命安全隐患,如2008年1月南方持续降雪之所以转变成为特大雪灾,其中最重要的原因之一是架空高压输电线路遭到破坏且不能够尽快修复,电网大面积断电从而导致一系列链式灾害,造成严重的生产和生活等诸多方面的社会问题。为保证输电线路可靠运行,定期检查和维护输电线路是十分必要的。目前主要采用人工和直升飞机巡线对输电线路进行定期检查,但是人工巡线精度低、难度大而且在恶劣环境下危险性高;直升飞机巡线效率高,但受限于气候等因素,且费用极高。人工和直升飞机巡线的缺陷为巡检机器人技术研究提供了空间,国际上对输电线路巡检机器人技术的研究始于20世纪80年代,国际上有代表性的研究成果包括日本东京电力公司及日本三菱电机株式会社研制的高压线巡检机器人样机[1-2],研究成果表明:机器人能用来协助或替代人完成输电线巡检作业,且近年来随着采用机器人完成巡线作业任务的需求增加,输电线路巡检机器人成为国内外机器人领域的研究热点之一[3-5]。国内的研究起始于20世纪90年代,主要的研究单位包括中科院沈阳自动化研究所、武汉大学、中科院自动化研究所等[6]。
机器人自主跨越架空线上的障碍物是巡检机器人研究中的关键内容。作者针对巡检机器人越障轨迹的要求,完成对控制系统整体的设计及优化;根据机器人的工作环境和作业内容,通过人机交互界面,在模拟环境中摸索出所需要的翻越各种障碍物的动作组合,完成知识库的建立和修改;分析巡检机器人跨越障碍原理,针对越障过程中手臂上线时空间定位这一难点,提出采用多传感器二次定位的方法,其优点是节省手臂上线时间,提高空间定位的准确性。
1 巡检机器人系统结构
1.1 巡检机器人机构设计
翻越障碍是巡检机器人工作的难点,也是其关键技术。因此所设计机器人,不仅要满足正常滚动,关键是在遇到架空地线上的障碍物后能够安全、快捷、稳定地翻越[7]。为满足翻越各种障碍时的快速性、稳定性和安全性要求,此次试验设计的巡检机器人采用双手臂轮臂复合结构,试验设计样机如图1所示。
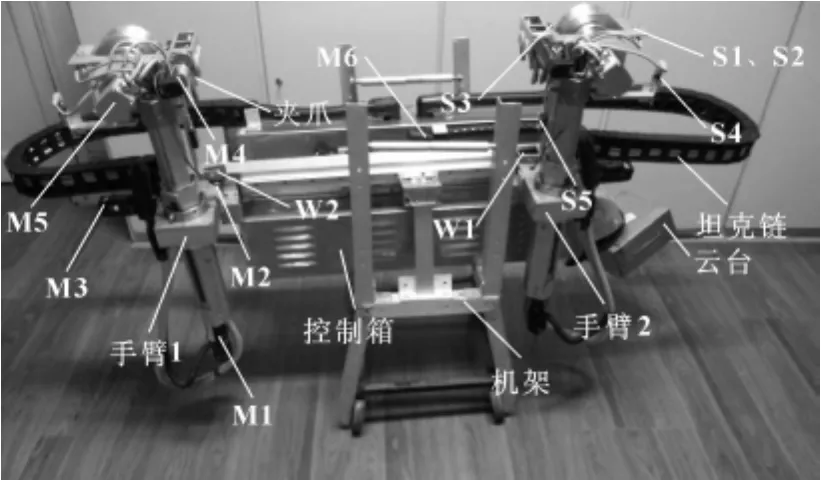
图1 巡检机器人样机图
机器人的手臂是翻越故障的主要执行机构,如图1示,两手臂位于线路的同一侧,即同侧悬挂式结构,双手臂可以自由上下伸缩,最大伸缩距离可达340 mm,满足跨越障碍的要求。每个手臂有5个控制部分,图1中M1~M5分别是控制手臂1的手臂升降、手臂滑动、手臂转动、滚轮和手爪闭合的电机,手臂2与之对称位置安装着5个控制电机,M6是实现机箱左右移动的电机,机箱最大移动幅值可达1 300 mm,实现质心的调节。
巡检机器人是以地线为作业路径,完成输电线路的检测和拍摄任务。图1中S1~S5为手臂2上实现检测功能的5个光电传感器,手臂1与之对称位置同样安装着5个光电传感器;W1、W2摄像头和云台实现巡线时拍摄功能;机器人箱体主要用来携带云台摄像头、机器人主控制器、无线数据传输系统、图像传输系统、电机驱动器等电子设备,机箱内部分布图如图2所示。

图2 机箱内部分布图
1.2 巡检机器人控制系统
机器人的控制系统实行分级控制,即远程管理主机控制系统和机器人本体控制系统,机器人本体控制系统包括机器人本体主控机和执行层。控制系统的组成结构如图3所示。

图3 控制系统组成结构
远程管理主机主要是对巡检工作的机器人进行实时监视和远程控制。机器人本体主控机采用PC104嵌入式计算机,通过无线通信接收远程主机下发的控制命令,并将其解释为各个电机的运动序列,依次发送给执行层进行执行。
机器人本体的控制系统以嵌入式 PC104工控机为核心,其组成主要有:CPU模块、DC/DC模块、串行口扩展模块及图像采集模块等。控制驱动器采用位置、速度、电流三闭环工作方式,能够很方便地适应多种复杂位置、速度和力矩控制方面的应用。机器人在自主越障时,它根据传感器检测信息,结合专家知识库就能实现动作规划和动作调整相结合的越障动作。机器人本体主控机通过图像采集卡采集机器人巡检图像,并将图像实时地传输给远程管理主机进行监视,实现故障检测。
2 专家数据库的建立
巡检机器人可控关节多,越障动作过程比较复杂。要实现其自主越障功能,可事先进行离线动作学习,且机器人在翻越相同类型的障碍时重复同一套操作动作,因此可通过在实验室模拟越障过程,离线形成操作知识库,实际越障时自动调用操作知识库完成越障动作过程。
机器人在进行越障作业时,首先是根据线路,确定障碍物的类型,然后根据障碍物的类型选择各个电机的动作组合,所以设计的知识库由线路库、障碍库和电机的动作库组成。根据已知条件设计实验室模拟实验知识库组合如图4所示。

图4 模拟实验知识库组合
不同的障碍物,需要经过实验室反复实验确定机器人的动作。为了方便、快速、准确地生成动作库数据,利用软件Visual C++6.0设计了巡检机器人手动操作界面,包括滚轮、手臂滑动、手爪闭合、手臂转动、手臂滑动和箱体滑动6个界面,控制11台电机实现巡检机器人各个关节的手动控制,手动操作界面如图5所示。

图5 手动操作界面
手动操作界面中运行模式选择速度模式,手动操作各关节实现翻越已知障碍物,获得各关节翻越障碍时所需的位移,从而生成电机的动作库。图6为障碍物是防震锤时的电机动作库。

图6 障碍物是防震锤时的电机动作库
3 巡检机器人越障
3.1 巡检机器人越障原理
图7为巡检机器人翻越防震锤示意图,当巡检机器人手臂B靠近障碍物后,通过遇障传感器获取障碍物信息并反馈障碍信号,系统发送停止信号使机器人停车,并根据障碍物信息调用知识库,执行越障动作。图(a)、(b)中手臂B遇障碍,手臂A上的夹爪夹紧地线,手臂B上升脱离地线,同时通过移动机箱调节机器人质心,保持机器人平衡,手臂 B向前平移跨越防震锤;图(c)中手臂B上的滚轮进行巡线后调节机器人质心;图(d)、(e)中手臂B上的夹爪夹紧地线,手臂A重复手臂B的动作翻越防震锤,完成翻越防震锤的动作。
如图7中(b)、(c)两图所示,手臂B翻越障碍后滚轮B需要重新上线,而上线存在3个关键问题:线路辨识、巡检机器人上线手臂相对于地线的空间位置定位和机器人本体质心的调节,其中机器人本体质心的调节如图7中通过机箱内水平传感器反馈的数据移动机箱实现。

图7 巡检机器人翻越防震锤示意图
3.2 线路辨识
架空地线由多股线绞合成直径为16 mm的导线,外形不规则,因此,辨识的精度、灵敏度和准确率直接影响整个越障过程。如图8所示,在每个机器人手臂上夹爪与滚轮的中心线两边上共安装成等腰三角形分布的3个光电传感器,当传感器光斑被导线遮挡时,光电传感器输出高电平信号,辨识出高压线。采用德国施克光电公司的WT9L光电开关,光源为红色激光,能保证良好的精度与灵敏度。

图8 传感器安装俯视图
3.3 空间定位
当机器人手臂通过动作规划越过障碍物后,要实现夹爪和行走轮与架空导线的准确空间定位,采用手臂上安装的激光扫描传感器S4和滚轮前后S1、S2、S3三个水平光电传感器二次定位的方法实现空间定位。
激光扫描传感器S4完成初定位,即通过传感器S4得知夹爪和行走轮与架空导线的初始相对位置,传感器S4的反馈信号经相关算法处理,再经过动作函数的处理后得到预定的运行轨迹,从而实现夹爪和行走轮与架空导线的初定位。工作原理如图9所示。

图9 巡线原理图
再定位即水平定位,参与水平定位的传感器有S1、S2、S3,安装位置俯视图如图8所示。
机器人的水平定位动作由于手臂的初始位置不同可分为2种不同状态,如图10和图11所示。

图10 脱线手臂姿态一

图11 脱线手臂姿态二
假设脱线手臂倾斜如图11所示,开始定位时状态如图 (a),首先未脱线手臂顺时或逆时针旋转,直到传感器S3达到地线为止,此时状态如图 (b)所示。在搜索到一点后,脱线手臂根据S3先于S1碰到地线,做出手臂需要顺时针旋转的判断,当S1到达地线后不停止,但开始记录从此时开始直到S2达到地线为止所转过的角度,当S2检测到地线后停止转动,状态如图 (d)所示。随后取记录所转过角度的1/2进行反向补偿,这是一个近似值但在实践过程中证明其精确度已足够。经过调整后就能使手臂完全对准于地线,状态如图 (e)所示,至此水平定位完成。这时的状态是机器人的手臂还凌驾于导线之上,所以再通过垂直定位的结果直接下降,在下降过程中保持S1、S2、S3都打到地线,如果出现丢失现象,为保证机器人的安全性,则重新开始定位工作。图11所示的是手臂的另一种倾斜姿态,区别在于传感器S1先于传感器S3达到地线,所以其手臂旋转的方向与图10相反,其他步骤与图10相类似。
空间二次定位方法能够使手臂非常精确地在一个三维空间中找到导线位置,大大缩短了定位的时间消耗,空间定位速度的提高也扩大了机器人的巡检范围,使其更具有实用性。而且此定位方法能更好地克服由于机器人本体在外力作用下的晃动而引起的传感器偏移,其速度及精度相比于只采用滚轮前后两个传感器时有了比较明显的提高。
4 实验及其结果
巡检机器人的实验环境为按照实际现场搭建的一条1∶1比例的输电线路,线路总长度约为30 m,地线直径为16 mm,线路上安装有防振锤、直线塔 (单金属器)、线夹等500 kV输电线路上较为典型的线路设施。
所研制的机器人能在实验条件快速、稳定地翻越搭建的1∶1模拟输电线障碍,翻越防振锤、直线塔的耗时分别约为:8、12 min,现场实验机器人运行正常,整个越障过程中机器人的姿态稳定,无碰撞等事故发生。作业臂在跨越障碍物后,能准确、快速地定位线路,保障作业安全、连贯地进行。
5 总结
越障是巡检机器人研究中的关键技术,机器人手臂上线是越障的难点和重点,作者采用多传感器二次定位方法实现空间定位是一种全新尝试。实验证明:作者所设计的巡检机器人在无障碍移动和越障上都有着良好的性能,所采用的空间定位方法,不仅能克服机器人在现场由于风及惯性造成的机器人多次重复辨识定位才能正确上线的难题,还能有效缩短翻越障碍的时间,提高巡检机器人的效率。
【1】SAWADA J,KAZUYUKI K.A Mobile Robot for Inspection of Power Transmission Lines[J].IEEE Transactions on Power Delivery,1991,6(1):309-315.
【2】HIGUCHI M,MAEDA Y,TSUTANI S.Development of a Mobile Inspection Robot for Power Transmission Lines[J].Journal of the Robotics Society of Japan,1991,9(4):457-463.
【3】吴功平,肖晓晖,郭应龙,等.架空高压输电线自动爬行机器人的研制[J].中国机械工程,2006,17(3):237-240.
【4】付双飞,王洪光,房立金,等.超高压输电线路巡检机器人越障控制问题的研究[J].机器人,2005,27(4):341-345.
【5】王鲁单,王洪光,房立金,等.一种输电线路巡检机器人控制系统的设计与实现[J].机器人,2007,29(1):7-11.
【6】徐显金,李维峰,吴功平,等.沿架空地线行驶的自主巡检机器人及应用[J].武汉大学学报,2010,43(6):752-756.
【7】吴功平,肖晓晖,肖华,等.架空高压输电线路巡线机器人样机研制[J].电力系统自动化,2006,30(13):90-93.
