永磁同步直线电机电流预测控制优化设计
2013-02-10王明义刘家曦李立毅曹继伟张成明潘东华
王明义, 刘家曦, 李立毅, 曹继伟, 张成明, 潘东华
(哈尔滨工业大学电气工程及自动化学院,黑龙江哈尔滨 150001)
永磁同步直线电机电流预测控制优化设计
王明义, 刘家曦, 李立毅, 曹继伟, 张成明, 潘东华
(哈尔滨工业大学电气工程及自动化学院,黑龙江哈尔滨 150001)
针对光刻机工件台中的永磁同步直线电机伺服系统需要高跟踪精度和高频响等问题,电机驱动控制系统的电流内环应具有快速响应能力。为了研究高动态性能的电流环控制策略,提出一种基于空间矢量脉宽调制技术,并通过引入修正因子来优化电流预测控制的算法,在保证对电流指令稳定跟踪的同时,提高了电流环的动态性能,有效地解决了传统的电流预测控制策略中稳态特性和动态特性之间的平衡问题,适合应用在要求电流环具有高动态特性的场合。构建了系统仿真模型和基于FPGA的实验平台,仿真和实验结果表明该优化算法的正确性和实用性。
永磁同步直线电机;电流环;空间矢量脉宽调制;预测控制;优化设计
0 引言
相比于旋转电机与传动机构相结合的传统直线运动机构,直线电机具有加速度大、控制精度高和响应快等优点,因此在高档数控机床、光刻机等高精密设备中,直线电机及其驱动控制系统具有重要的研究和应用价值[1-2]。
在高精度的永磁同步直线电机(permanent magnet linear synchronous motor,PMLSM)驱动控制系统中,主要包括位置环、速度环和电流环3个控制环节,电流环作为最内环节,将控制系统与电机单元衔接起来,是电机驱动控制系统的核心环节,特别是应用在光刻机工件台中的直线电机驱动控制系统,具有较高的位置环带宽才能提高系统的跟踪精度,因此电流环需要更高的动态性能[3]。
电流环通常采用3种控制策略:滞环控制、比例积分(proportional plus integral,PI)控制和预测控制。滞环控制[4-6]具有动态响应快和应用简单等特点,但存在开关频率不固定、开关损耗大、滤波器设计复杂等问题;同步旋转坐标系下的PI控制是当前应用最广泛的电流环控制策略,能够实现稳态电流无静差调节,抗干扰能力强,但交、直轴间变量的耦合依然存在,系统的易饱和性带来超调、振荡和动态特性下降等问题[7-8];结合空间矢量脉宽调制技术(space vector pulse width modulation,SVPWM)[9-10]的电流预测控制,具有开关频率固定和电流纹波较小等优点,并且理论上电流能在2个开关周期内达到给定值,若结合参数辨识和扰动补偿等技术,非常适合应用在对电流环动态特性要求较高的场合。由于预测控制在电流环控制策略中具有较理想的控制特性,对其进行深入分析成为当前研究热点[11-17]。文献[14-16]对电流预测控制进行了优化设计,降低了预测控制性能对电机参数的依赖性;文献[17]利用延时反馈补偿方法,通过合理的滤波器设计,对预测控制中参数变化带来的扰动量进行有效补偿,提高了系统的鲁棒性。
传统的电流预测控制是利用kT时刻电流预测(k+2)T时刻电流,会引起系统的超调和振荡,文献[11]利用kT时刻电流来估算(k+1)T时刻电流,并通过估算后的(k+1)T时刻电流来预测(k+2)T时刻电流,该方法能够保证电流环稳态性能,但降低了动态响应能力。
本文通过对无差拍离散电流预测控制进行优化设计,利用修正后(k+1)T时刻估算电流对指令电流进行预测控制,达到既保证电流环稳定的同时,又减少其动态响应时间的目的,可以在实际工程应用中提高电流环的带宽。为了验证该算法的可行性和有效性,本文对其进行了仿真分析,并在基于XC3S400 FPGA的平台上进行了实验验证。
牧区经济贫困落后与草原生态安全之间存在着互为因果、互相强化的恶性循环关系[23]。天祝属于纯牧业县,在经济的发展过程中应该考虑其草原生态环境,首先应该加强控制实际的载畜量,降低超载率,防止退化草原的持续恶化,同时还应注重草原牧区科教事业的发展[23],提高该区域农牧民的受教育水平。鉴于天祝牧区高寒草原生态安全的敏感性和脆弱性,在未来的发展中各级政府尤其要重视该地区草原生态安全,制定相关政策保障该地区高寒草原的生态安全。
1 永磁同步直线电机模型建立
本文在Matlab/SIMULINK环境中对所提出的方法进行了仿真分析,电机模型参数如下:Rs=3.9 Ω,Lq=Ld=Ls=26.8 mH,λf=0.2 Wb,np=10,τ =12 mm。直流母线电压为380 V,采样周期为100 μs,死区时间为2 μs。q轴和d轴指令电流分别为10 A和0 A,负载推力为775 N。

I*(k+1)=GI(k)+H[V*(k)-λ]。 (6)
将等式(1)和(2)离散化,有

其中,Ts为电流采样周期。
由于采用的永磁同步直线电机为表贴式结构,因此Lq=Ld=Ls,将式(3)和式(4)规范化,可表达为

2 电流预测控制优化设计
将式(9)、式(10)代入式(8)中,可以得到最终的电流预测方程为
式中:λq=Lqiq,λd=Ldid+ λf,ωe=npωr,ωr= πv/τ。其中,λq和λd分别是q轴和d轴磁链,ωe是电角速度,ωr是动子角速度,vq和vd分别是q轴和d轴电压,iq和id分别是q轴和d轴电流,Rs是相电阻,Lq和Ld分别是q轴和d轴电感,λf是永磁体磁链,np是电机极对数,τ是电机极距,v是动子线速度,p是微分算子。
然而,在实际应用中指令电压V*(k)在kT采样周期内完成计算后并没有立即执行,而是在(k+1)T起始时刻才加载到逆变器上,如式(7)所示,图1为预测控制的时序图,可以看出,在(k+2)T起始时刻,采样电流I(k+2)达到kT起始时刻指令电流I*(k+1),如式(8)所示。
将两种方法求得的反馈矩阵分别进行仿真实验,给定同样的电压输入信号,观察闭环系统对于小球在导轨上位置x的响应。

图1 电流预测控制时序Fig.1 Time sequence of predictive current control
如果式(8)中未知的(k+1)T起始时刻实际电流I(k+1)没有经过优化处理,而直接用kT起始时刻采样电流I(k)或者(k+1)T起始时刻估算电流Ip(k+1)代替,Ip(k+1)如式(9)所示,会带来实际跟踪电流超调或者动态响应相对较慢等问题,因此本文引入修正因子 η∈[0,1],可以用修正后的(k+1)T起始时刻估算电流Iη(k+1)代替实际电流I(k+1),如式(10)所示。
图3为实验系统实物图,实验电机为永磁同步直线电机,参数为:Rs=1.8 Ω,Lq=Ld=Ls=2.2 mH,λf=0.165 Wb,np=4,τ=85.4 mm。位置传感器采用增量式光栅尺,分辨率为0.1 μm,采用Xilinx公司的XC3S400型FPGA作为主控芯片,直流母线电压为 310 V,采样周期为 100 μs,死区时间为 2 μs。将直线电机动子固定锁死,驱动控制器工作于电流环,q轴电流指令Iq*为阶跃给定,在250 μs时刻,由0 A变为5 A,利用提出的优化电流预测控制策略对电机电流进行控制,并通过12 b D/A芯片输出电流指令Iq

根据无差拍电流预测控制原理,其目的是通过利用kT起始时刻的采样电流I(k)和指令电流I*(k+1)来计算当前时刻所需的指令电压V*(k),经过空间矢量脉宽调制后加载在三相电压源逆变器(voltage source inverter,VSI)上,将(k+1)T 起始时刻得到的采样电流I(k+1)与指令电流I*(k+1)间的误差减小到零,其表达式为
《水土保持定额》中的工程措施人工工资为1.50~1.90元/h,按8 h/d计算,水土保持工程人工日工资在9.60~15.20元/d之间。按(429号文件)枢纽工程部分二类区(柳林县)中级工9.15元/h,按每天8 h计算,水利枢纽工程人工日工资73.20元/d。按正常市场经济发展,生活水平及人工工资正常提升,“2017年山西省最低工资标准与规定”二类地区(柳林县)16.60元/h,按每天8 h计算,人工日工资132.80元/d。《水土保持定额》中人工工资远远低于当地(柳林县)市场人工价格。
其中,I是单位矩阵。
本文所提出的控制策略需要选择合理的修正因子η来保证电流环稳定的同时还具有快速的动态响应能力。当 η =0 时,Iη(k+1)=I(k),式(11)与式(6)等效,为传统电流预测控制,相当于高增益的比例调节器,电流环具有明显的超调和振荡现象;当η =1 时,Iη(k+1)=Ip(k+1),此时与文献[11]所提出方法类似,提高了电流环的稳定性,但降低了其动态特性;当0<η<1时,电流预测控制综合了前两种控制方式的优点,特别是与文献[11]相比,提高了电流环的动态特性。
3 仿真结果
在同步旋转坐标系下,永磁同步直线电机的定子电压方程为
利用复合材料的电气绝缘性,当复合横担足够长时,可以用较短的悬挂金具替代悬式绝缘子,一方面塔身高度能得到一定程度降低,另一方面绝缘水平也能达到预期要求[16-17]。
图2为提出的电流预测控制方法在不同η值时q轴参考指令电流Iq*和实际电流Iq的仿真结果。可以看出,当η=0时,如图2(a)所示,实际电流Iq出现振荡现象;当η=1时,如图2(d)所示,实际电流Iq没有超调和振荡现象,但上升时间为2.4 ms,电流环动态特性较差;当η=0.4或 η=0.6时,如图2(b)或图2(c)所示,电流环的动态特性优于η=1时,但η=0.4时,实际电流Iq具有略微超调。仿真结果表明,随着修正因子η的增加,电流环的稳态特性增强,但动态特性下降,当修正因子η=0.6时,所提出的控制策略具有较理想的动静态特性。
4 实验结果
(1)依据本文方法,计算弹性半空间上的各向同性弹性薄板[15]。计算条件为板边长4 m,厚0.2 m,地基与板光滑接触,地基泊松比为0.4,切变模量12.25 MPa;板的泊松比为0.167,弹性模量34.3 GPa;板上均布受压载荷0.98 MPa。本计算采用空间8结点6面体单元计算板中最大挠度为1.053 mm;文献[15]采用样条有限元的结果为1.062 mm,采用四结点等参元计算结果为1.055 mm。本计算采用三维实体单元建立有限元分析模型的结果与文献[15]考虑板的横向剪切影响的Mindlin二维板单元在计算板与基础相互作用的结果接近。
*和实际电流Iq。图4为取不同修正因子η值时,利用提出的优化电流预测控制策略得到的实验结果。将图4(a)~图4(d)的实验结果进行对比,当η=0时,跟踪电流出现振荡,但电流上升时间最快,为0.2 ms,当η=1时,跟踪电流无超调和振荡现象,系统最稳定,但电流上升时间最慢,为0.7 ms,当η=0.6时,跟踪电流达到较理想的跟踪效果,电流上升时间为0.5 ms,超调很小,能够同时满足电流快速稳定的跟踪效果。实验结果与理论分析和仿真结果相同,验证了该方法的正确性和有效性。
1.反腐倡廉建设与作风建设相互区别。(1)反腐倡廉建设与作风建设的内涵不同。当前,反腐倡廉建设主要指靠教育和制度来预防,靠法治来惩处因权力不受制约而产生的权钱(色)交易以及各种各样的以权谋私等行为,如贪污受贿、买官卖官等。作风建设主要是靠教育和制度来消除党内违背党的宗旨的各种不健康的风气,例如,形式主义、官僚主义、享乐主义和奢靡之风等。
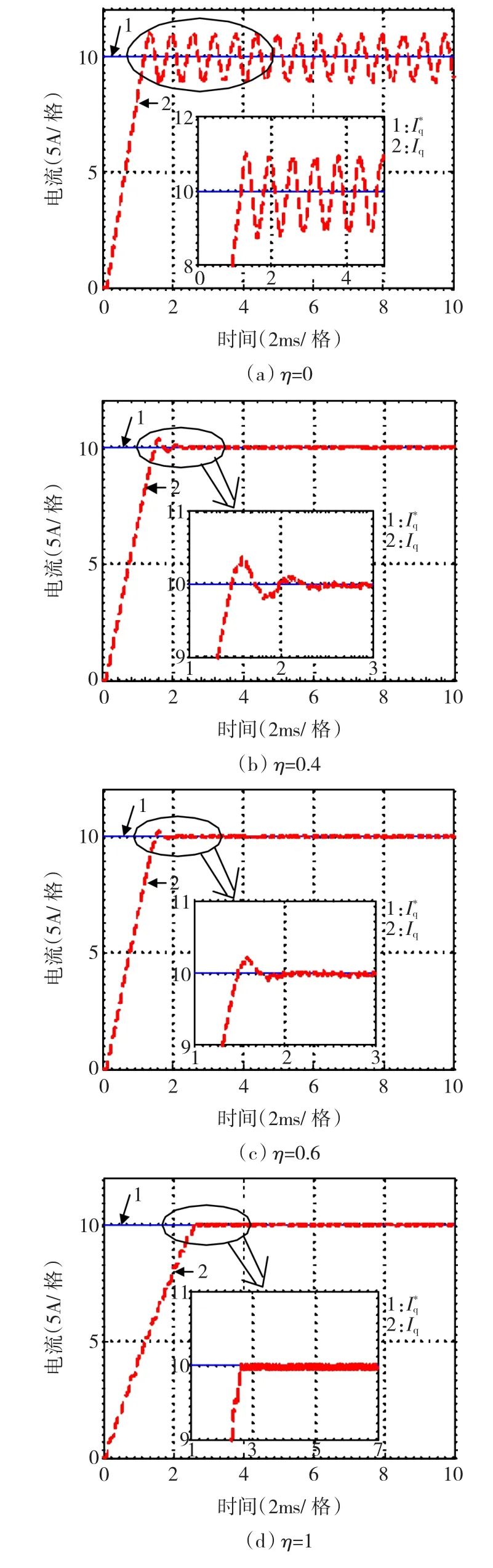
图2 不同η值时提出的电流预测控制方法仿真结果Fig.2 Simulation results of the proposed algorithm with different η values
图3 实验系统实物图Fig.3 Photograph of experimental system

图4 不同η值时提出的电流预测控制方法实验结果Fig.4 Experimental results of the proposed algorithm with different η values
5 结语
本文对永磁同步直线电机电流预测控制进行优化设计,通过加入修正因子,对下一时刻估算电流进行有效调节,使得在保证系统稳定性的同时,提高了电流环的动态响应性能。传统的电流预测控制方法虽然解决了预测控制带来的超调和振荡问题,却降低了电流环的动态特性,本文提出的方法有效地解决了电流预测控制中稳态特性和动态特性的平衡问题。通过仿真验证了所提出理论的正确性,在基于FPGA的实验平台上得出的实验结果与理论分析和仿真结果基本吻合,验证了所提方法的有效性。
[1] 李志军,刘成颖,孟凡伟,等.基于ZPETC和DOB的直线电机控制器设计及实验研究[J].中国电机工程学报,2012,32(24):134-140.
LI Zhijun,LIU Chengying,MENG Fanwei,et al.ZPETC and DOB based controller design for PMLSM and experimental investigation[J].Proceedings of the CSEE,2012,32(24):134 -140.
[2] MISHRA S,COAPLEN J,TOMIZUKA M.Precision positioning of wafer scanners segmented iterative learning control for nonrepetitive disturbances(applications of control)[J].Control Systems,2007,27(4):20-25.
[3] 刘川,朱非甲,马伟,等.直线电机的线性自抗扰控制[J].电机与控制学报,2013,17(1):71-76.
LIU Chuan,ZHU Feijia,MA Wei,et al.Research on linear active disturbance rejection control over linear motor[J].Electric Machines and Control,2013,17(1):71 -76.
[4] 郑建勇,黄金军,尤鋆,等.基于电流滞环控制的Z源光伏并网系统研究[J].电机与控制学报,2010,14(5):61-67.
ZHENG Jianyong,HUANG Jinjun,YOU Yun,et al.Research on Z source based current hysteresis control used in photovoltaic gridconnected system[J].Electric Machines and Control,2010,14(5):61-67.
[5] TIWARI A N,AGARWAL P,SRIVASTAVA S P.Performance investigation of modified hysteresis current controller with the permanent magnet synchronous motor drive[J].Electric Power Applications,IET,2010,4(2):101-108.
[6] 洪峰,单任仲,王慧贞,等.一种变环宽准恒频电流滞环控制方法[J].电工技术学报,2009,24(1):115-119.
HONG Feng,SHAN Renzhong,WANG Huizhen,et al.A varied hysteresis-band current controller with fixed switching frequency[J].Proceedings of the Transactions of China Electrotechnical Society,2009,24(1):115 -119.
[7] 周华伟,温旭辉,赵峰,等.一种具有预测功能的抗积分饱和PI速度控制器[J].电机与控制学报,2012,16(3):15-21.
ZHOU Huawei,WEN Xuhui,ZHAO Feng,et al.Predicative anti-windup strategy for PI-type speed controller[J].Electric Machines and Control,2012,16(3):15 -21.
[8] CHOI J W,LEE S C.Antiwindup strategy for PI-type speed controller[J].IEEE Transactions on Industrial Electronics,2009,56(6):2039-2046.
[9] 朱瑛,程明,花为,等.磁通切换永磁电机的空间矢量脉宽调制控制[J].电机与控制学报,2010,14(3):45-50.
ZHU Ying,CHENG Ming,HUA Wei,et al.Space-vector PWM control of flux-switching permanent magnet motor[J].Electric Machines and Control,2010,14(3):45 -50.
[10] VAN D,SKUDELNY H C,STANKE G V.Analysis and realization of a pulsewidth modulator based on voltage space vectors[J].IEEE Transactions on Industry Applications,1988,24(1):142-150.
[11] MOON H T,KIM H S,YOUN M J.A discrete-time predictive current control for PMSM[J].IEEE Transactions on Power Electronics,2003,18(1):464-472.
[12] MORWL F,LIN S X,RETIF J M,et al.A comparative study of predictive current control schemes for a permanent-magnet synchronous machine drive[J].IEEE Transactions on Industrial E-lectronics,2009,56(7):2715 -2728.
[13] SPRINGOB L,HOLTZ J.High-bandwidth current control for torque-ripple compensation in PM synchronous machines[J].IEEE Transactions on Industrial Electronics,1998,45(5):713-721.
[14] 牛里,杨明,刘可述,等.永磁同步电机电流预测控制算法[J].中国电机工程学报,2012,32(6):131-137.
NIU Li,YANG Ming,LIU Keshu,et al.A predictive current control scheme for permanent magnet synchronous motors[J].Proceedings of the CSEE,2012,32(6):131-137.
[15] 王宏佳,徐殿国,杨明.永磁同步电机改进无差拍电流预测控制[J].电工技术学报,2011,26(6):39-45.
WANG Hongjia,XU Dianguo,YANG Ming.Improved deadbeat predictive current control strategy of permanent magnet motor drives[J].Proceedings of the Transactions of China Electrotechnical Society,2011,26(6):39-45.
[16] 王伟华,肖曦,丁有爽.永磁同步电机改进电流预测控制[J].电工技术学报,2013(3):50-55.
WANG Weihua,XIAO Xi,DING Youshuang.An improved predictive current control method for permanent magnet synchronous motors[J].Proceedings of the Transactions of China Electrotechnical Society,2013,28(3):50-55.
[17] KIM K H,YOUN M J.A simple and robust digital current control technique of a PM synchronous motor using time delay control approach[J].IEEE Transactions on Power Electronics,2001,16(1):72-82.
(编辑:刘琳琳)
Optimization design of predictive current control for permanent magnet linear synchronous motor
WANG Ming-yi, LIU Jia-xi, LI Li-yi, CAO Ji-wei, ZHANG Cheng-ming, PAN Dong-hua
(School of Electrical Engineering and Automation,Harbin Institute of Technology,Harbin 150001,China)
For permanent magnet linear synchronous motor servo system applied in the wafer stage of lithography,high tracking precision and high frequency response is required,and the system often requires fast response current inner loop.To study the control strategy of the current loop with the high dynamic performance,based on space vector pulse width modulation technology,an improved predictive current control with introducing correction factor is proposed.This strategy not only makes the tracking current steady,but also improves the dynamic performance of the current loop.It is a good solution to the equilibrium problem between steady-state and dynamic characteristics in the traditional predictive current control strategy,and is suitable for application in the occasion of high dynamic characteristics of a current loop.Simulation model and experiment platform based on field programmable gates array(FPGA)were constructed,and the simulation and experimental results show the proposed optimal algorithm is correct and effective.
permanent magnet linear synchronous motor;current loop;space vector pulse width modulation;predictive current control;optimization design
TP 273
A
1007-449X(2013)11-0028-05
2013-06-09
国家科技重大专项(2009ZX02207-001);国家自然科学基金(51177024);国家杰出青年科学基金(51225702)
王明义(1986—),男,博士研究生,研究方向为直线电机驱动与控制技术;
刘家曦(1980—),男,博士,讲师,研究方向为超精密电机伺服控制、超高速电机驱动控制;李立毅(1969—),男,教授,博士生导师,研究方向为特种电机;
曹继伟(1983—),男,博士研究生,研究方向为新型高速电机的研制设计;
在“配方施肥”区处理:配方施肥(N1P1K1)、配方施肥无氮(N0P1K1)、配方施肥无磷(N1P0K1)、配方施肥无钾(N1P1K0)。
张成明(1983—),男,博士,讲师,研究方向为直线电机、超磁致伸缩执行器技术;
潘东华(1982—),男,博士研究生,研究方向为超精密直线电机系统的研究与应用。
李立毅