智能车路径识别与控制研究
2013-01-31王思明汉鹏武
季 聪,王思明,汉鹏武
(兰州交通大学自动化与电气工程学院,甘肃兰州730070)
智能车辆又被称为轮式移动机器人,是一个集环境感知、规划决策、自主驾驶控制等多种功能于一体的智能体[1]。道路感知与识别的方法有多种,包括雷达、红外、激光、超声波、磁导航以及机器视觉等方法[2]。在实际驾驶过程中,驾驶员通过视觉获得外部的环境信息。利用视觉的路径识别方法,具备采集速率快,图像信息含量丰富的优点,是智能车辆进行路径识别的一种有效方法[3-4]。
针对复杂的路径采集信息,本文设计了基于MK60N512VLQ100(K60)单片机为核心的智能车路径识别系统。路径信息使用OV7620摄像头采集[5],图像的数据处理在uc/os-Ⅱ操作系统下使用自适应动态阈值图像处理算法,通过bluetooth无线通信技术进行在线调试,设计并开发了稳定性好、处理速度快的智能车路径识别系统。
1 系统总体结构设计
智能车辆设计主要分为硬件设计和软件设计。硬件设计主要包括机械调整和硬件电路。硬件电路主要包括核心控制器、电源管理、图像采集、电机驱动、舵机驱动和人机交互等模块[6]。图1为智能车系统结构图。
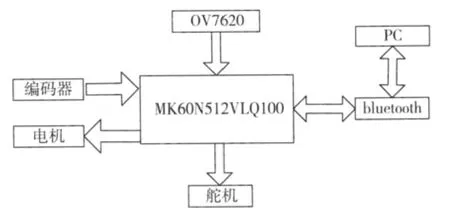
图1 系统结构图
1.1 系统硬件设计
本系统采用OV7620图像传感器,OV7620内置10位双通道A/D转换器,输出8位图像数据,因此直接将摄像头的图像灰度信息输出连接至K60的GPIO端口。同时分别采用了稳压模块给系统各部分供电,如图2所示。
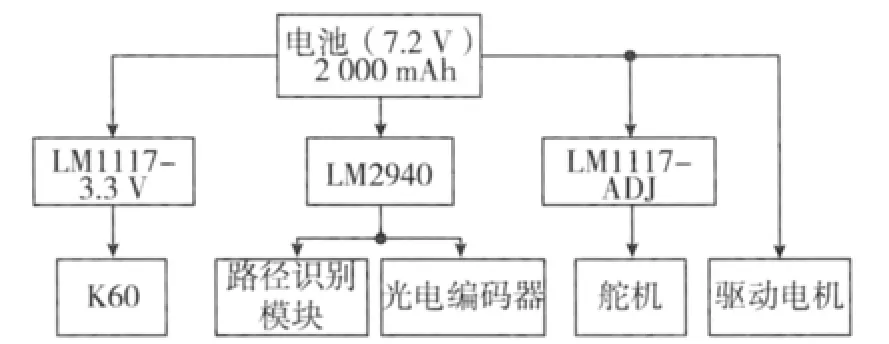
图2 电源模块
电机驱动电路采用的是BTS7960,由于BTS7960属于大功率驱动芯片,为了防止回流而击穿单片机引脚,在单片机和驱动芯片之间进行了隔离,并采用了bluetooth实现上位机和下位机的通信。
1.2 系统软件设计
系统软件设计采用嵌入式实时操作系统uc/os-Ⅱ开发技术。通过修改OS_CPU.H,OS_CPU_C.C和OS_CPU_A.ASM这3个与处理器相关的文件,进行整个系统之间任务的调度,以满足系统的多任务实时性需求。
2 系统采集与控制设计
按照系统的功能要求,应用程序的设计分为以下几个并行任务[7],具体的应用程序流程图如图3所示。

图3 应用程序流程图
2.1 摄像头视频信号采集
K60首先捕捉OV7620VSYN中断,进入场中断,然后捕捉HERF,进入行中断,读取GPIO端口图像灰度数据存入图像数据数组。
摄像头采用俯视角度采集路径信息,由于其视野角度比较小,因此所拍摄的画面会呈倒梯形(摄像头采集视图如图4所示)。
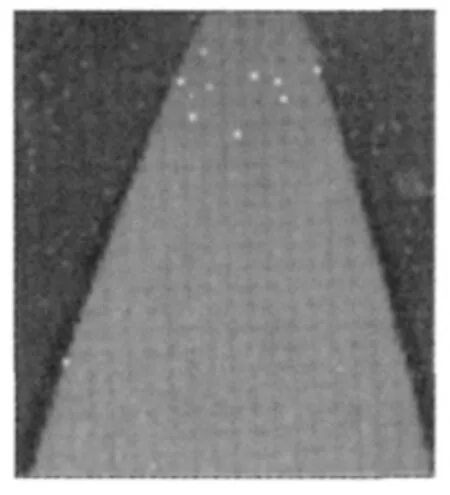
图4 摄像头采集视图
2.2 路径图像信息提取
2.2.1 图像分割
图像分割算法大概可以分为边缘检测分割和阈值分割两类[8]。
图像边缘是指图像中周围像素灰度有阶跃变化或屋顶变化的像素点,而边缘检测的主要依据是图像一阶导数和二阶导数[9],但是进行图像边缘检测的前提是首先要对图像进行滤波,过程复杂,大量浪费单片机的CPU。
阈值分割是基于区域的图像分割方法,适用于物体与背景区域具有强烈对比的图像,而且计算简单。阈值分割算法的关键在于阈值的确定,由于智能车辆识别路径过程中,受时间和空间变化影响较大,必须采用动态阈值分割算法。
2.2.2 动态阈值算法
动态阈值分割算法主要有实验法、灰度值方图法、迭代选择阈值法、最小均方误差法、最大类间方差法等[10]。
由于本系统测试实验中的路径信息只有黑白信息,比较单一,在采用根据直方图谷底确定阈值的测试中,由于外界光线影响,有严重的噪声,基于此采用了一种动态阈值检测方法,该方法设计步骤如下:
1)读取当前图像的灰度值,并存入数组Buffer[row][column];
2)遍历寻找数组中的最大和最小灰度值Tmax和Tmin,确定阈值初值T0,公式为

3)根据阈值将图像分割成前景和背景两部分,求出两部分的平均灰度值TA和TB,公式为
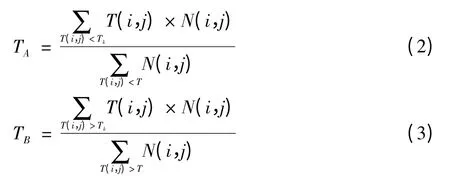
4)求出新阈值,公式为

经过动态阈值检测后,对图像进行二值化后的图像如图5b所示。
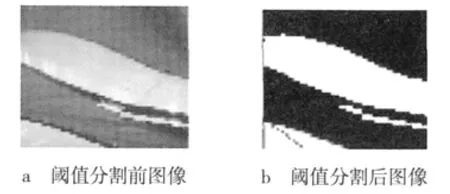
图5 动态阈值分割前后对比
2.2.3 图像去噪
本系统在路径识别的过程中,采集到的图像存在影响道路识别的噪声,即含噪图像[11]。如果图像第i行、第j列为噪点,则对该点周围8个点的像素值求和后取均值,公式为

式中:f(i,j)为图像第i行j列重新赋予的像素值。图6a中所示的红色点为噪点,图6b为经过图像去噪后的图像。
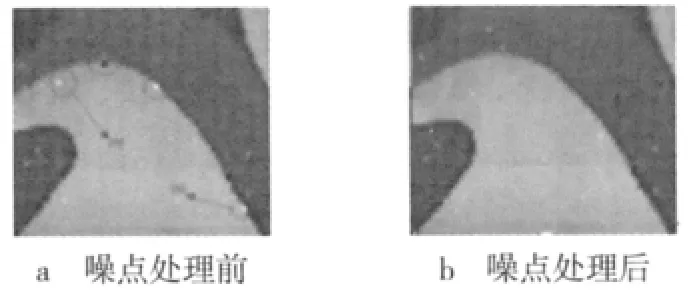
图6 图像去噪
2.3 路径识别
本系统识别的路径有直道、小S弯道、大S弯道、普通弯道、急弯、直入弯等。设摄像头采集的每帧图像为一个平面,拟合的路径中心线(见图7)在平面中最近点定义为道路首点,为start(xstart,ystart),最远端定义为道路末点end(xend,yend),图像的横纵坐标分别为路径中心线的行列值。
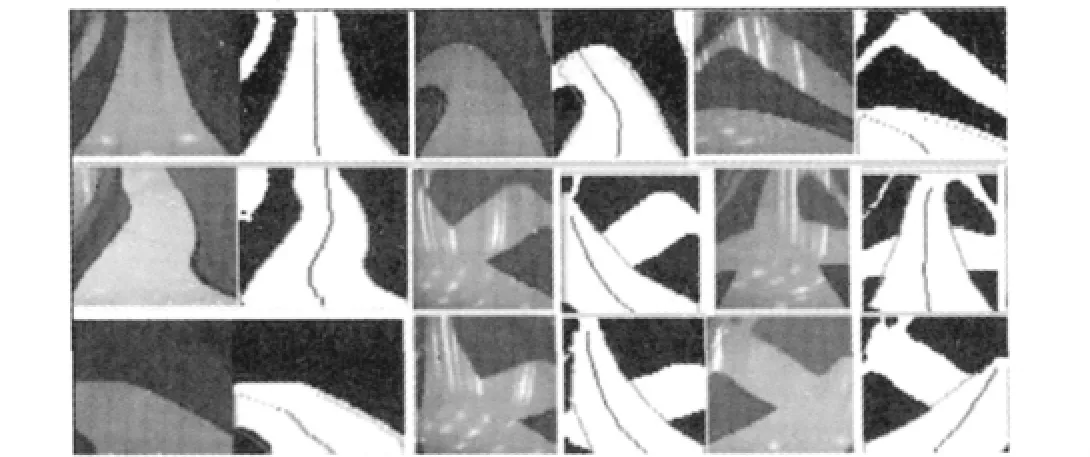
图7 路径中心线提取前后比较图
xedge为图像纵向跨度

yedge为图像横向跨度
建议制定统一的操作指南,规范资金统筹流程,行文统一各类资金统筹的指标口径,资金的类别、范围等,建立资金统筹的正面清单,明确各项资金是否纳入统筹,确保县级确定统筹项目;明确中央、省、县专项资金统筹的项目、范围、内容和相关要求;年度资金指标应当及早下达,资金实行按进度拨付,以便基层对照资金来源额度制定方案,落实项目,报备实施;建立规范化的资金统筹考评统计和检查指标,让各级各部门在资金检查、审计、三方考评等方面口径和要求统一,简化设计,精简内容;及时修改专项资金管理办法,修改后的办法与资金指标文件应明确资金使用方向、类别,上级在下达资金文件中明确资金统筹的项目及数额,消除县级统筹资金的后顾之忧。

yc_edge为路径中心线在图像中的位置

ymax_edge为路径中心线最大横向跨度

ymax为路径中心线在图像平面中视野最远点的纵坐标,ymin为路径中心线在图像平面中视野最近点的纵坐标。

式中:i为拟合中心线上点的横坐标,column_x[i]为该点纵坐标,k[i]反应路径中心线弯曲程度。根据上述公式建立特征空间如表1所示。

表1 特征空间的坐标划分
通过上述特征空间,建立了道路样本空间,可知:
1)直道,横向跨度很小,纵向跨度很大;
2)普通弯道,纵向跨度不能小于50%图像纵向跨度;
3)大S弯道,横向跨度范围比较广;
4)入弯,前方道路中心线弯曲程度大,后方路径中心线近似为直线,弯曲变化趋势恒为正(负)或0;
5)出弯,前方路径中心线近似为直线,并且后方路径中心线弯曲程度大,弯曲变化趋势恒为正(负)或0;
6)急弯(紧急路况),纵向跨度很小,不超过整个图像跨度的30%。
2.4 控制策略
在提取出路径中心线识别路径后,就可以根据当前信息实现速度和转向的优化PID控制:直道快速通过、较小的S弯道适当减小比例系数、较大的S弯道适当增大比例系数等。
在小车的速度控制上,采取了增量式PID与bangbang控制结合的控制方法,将光电编码器的反馈值和设定的期望值相比较,通过PWM输出来对点击实现速度的闭环控制。增量式PID控制算法如式(11)所示

式中:Δu(k)为第n次的输出增量;e(k)为第k次的偏差。并且引入bang-bang控制,在速度加大的时候,PWM输出为0;当速度较小的时候输出全额PWM,可以使小车更快地响应加减速。
在进行舵机控制过程中,经过测试,在超频情况下,每行图像采集110个点,使视场长度足以覆盖各种路径,路径经过精确识别,可以精确确定车身位置与路径中心线的偏差。进行PID控制的调节策略是:积分项系数置零;微分项系数使用定值;比例系数Kp使用二次函数曲线,随车身中心位置与舵机中心值的偏差呈二次函数关系,公式为

式中:Δ_error为车身中心位置与中心值的偏差。
3 结果分析
使用VC6.0开发上位机进行在线调试并将在线调试稳定的系统在自制道路上进行实际测试。
3.1 在线调试结果分析
使用VC6.0 MFC类库做界面开发[11]。图像处理界面如图8所示。上位机采集的各种赛道信息如图9所示。
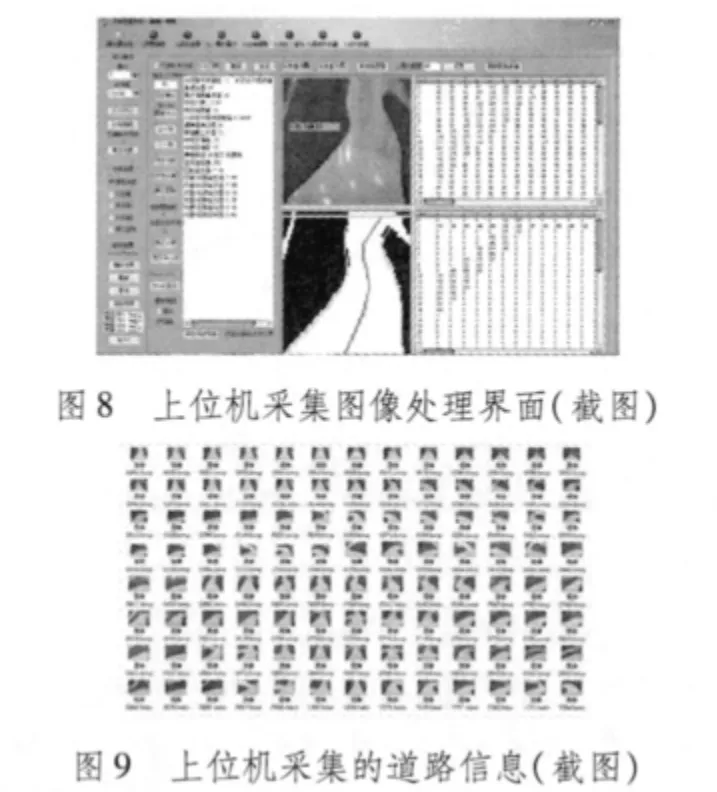
从图8可以看出,图中上半部分左边为原始图像,右边为二值化后的数据,下半部分左边为处理后的图像,右边为二值化后的数据,从图中的图像和数据都能明显地看出处理后的图像和数据中几乎没有噪声点,该结果为设计控制律提供很大的方便。通过对图9中的各种图像进行分析、归类,可以很好地设定控制律中的参数以满足各种控制策略的需求。
根据系统所提取的路径信息,设计有效的速度控制策略保证智能车在行驶中达到最大的速度。图10为PID实际调节图,蓝色线为速度设定曲线,白色线为实际速度曲线。从图中可以看出,算法响应时间较快,当系统遇到外界干扰时,具备快速的调节能力,并在实际测试中取得了较好的效果。

图10 PID调节仿真图(截图)
3.2 实际测试结果分析
为验证算法的有效性,制作了长75 m、宽45 cm包含不同类型路径的道路。实验中,以偏离道路中心线误差和冲出赛道次数为衡量标准,V为测试的平均速度,ΔS为误差(车身相对于赛道中心线的偏差,in表示沿内弧行进,out表示沿外弧行进),N为冲出道路有效范围次数(测试20圈)。优化行驶路径的测试数据如表2所示。
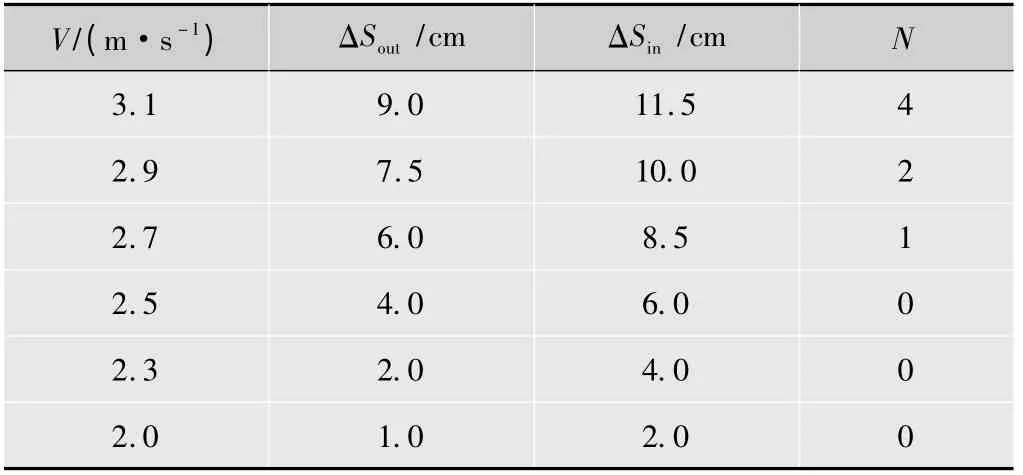
表2 测试数据
由表2可以看出,小车在2.5 m以下时,小车沿优化路径行驶,极少冲出跑道,这是因为小车在行驶的过程中已经精确地识别出路径信息,提前做出了路径选择,当小车的速度达到2.9 m以上时,冲出跑道的次数明显增加,这是因为由于小车速度的增加,在行驶的过程中出现了侧滑,一方面是车模机械结构的限制,另一方面是车模在高速的行驶过程中采集到的图像出现模糊的情况,使得路径识别出现误差,目前的处理方法是沿用上一次的路径采集结果,这需要在以后的研究中做进一步探讨。由此可以说明精确的路径识别结果为控制策略的选择提供了极大的方便,使系统的控制性能有了明显的提高。
实际测试的结果表明了自适应动态阈值图像处理算法在智能车路径识别中具有明显的优势,通过该算法对图像进行有效的处理,加以合理的路径优化方法与控制策略,增加了智能车对路径的跟随性能,使系统具有很强的鲁棒性。
4 结束语
本设计结合第七届全国大学生“飞思卡尔”杯智能汽车竞赛,采用OV7620摄像头采集道路信息,通过对采集图像进行分析处理来确定智能车路径。针对竞赛题目中的各种路径的图像,对其进行了分析和比较,给出了一种路径识别优化的方法,将该方法与智能控制方法相结合,使小车稳定、高速地在未知的赛道上行驶。实际测试结果表明,本文给出的方法能够使智能小车有效地识别多种类型路径,且系统运行稳定。
[1]张秀彬,应俊豪.汽车智能化技术原理[M].上海:上海交通大学出版社,2011.
[2]陈伟.基于双目视觉的智能车辆道路识别与路径规划研究[D].西安:西安理工大学,2009.
[3]DEMIRLI K,KHOSHNEJAD M.Autonomous parallel parking of a carlike mobile robot by a neuro-fuzzy sensor-based controller[J].Fuzzy Sets and System,2009,160(19):2876-2891.
[4]王琪,程飞,陈四杰,等.基于Freescale S12微控制器的高速智能寻迹车设计与实现[J].江苏科技大学学报:自然科学版,2012,26(1):75-80.
[5]宋海吒,唐立军,谢新辉.基于FPGA和OV7620的图像采集及VGA显示[J].电视技术,2011,35(5):45-47.
[6]刘杰,武丽,赵永利.基于车载视觉导航的智能车控制系统研究[J].传感器与微系统,2011,30(5):34-36.
[7]郑建立,黄丽佳,葛鹏飞,等.基于CCD的智能车寻迹方法[J].东华大学学报:自然科学版,2008,34(6):728-731.
[8]张云洲,师恩义,吴成东,等.基于CCD的智能车导航系统研究[J].东北大学学报:自然科学版,2009,30(2):162-165.
[9]朱红高.图像边缘检测技术研究现状[J].制造业自动化,2010,32(1):45-47.
[10]张铮,王艳平,薛桂香.数字图像处理与机器视觉:VISUAL C++与MATLAB实现[M].北京:人民邮电出版社,2010:361-362.
[11]齐威,韦鹏,许明龙.第七届全国大学生“飞思卡尔”杯智能汽车竞赛神州1号技术报告[EB/OL].[2012-11-20].http://wenku.baidu.com/view/90b919818762caaedd33d43c.html.
