导弹滚转自动驾驶仪设计与仿真
2012-12-22刘永善
陈 磊 刘永善
(北京理工大学宇航学院,北京 100081)
对于气动外形轴对称的导弹,侧滑转弯是最常用的一种控制方式,即利用改变攻角、侧滑角的方法来获得俯仰或偏航方向的过载.在这种控制方式下,必须对导弹的滚转角进行稳定,使其的变化保持在一定的范围内,防止俯仰和偏航两个方向导引指令及控制信号发生混乱,所以要将滚转通道设计成为一个滚转稳定回路.在传统的设计方法中,基本上使用PID方式对滚转自动驾驶仪进行设计,设计时使用的是在“系数冻结”、“小扰动”等假设前提下得到的线性化弹体数学模型.导弹飞行过程中,高度在几千米甚至上万米的范围内变化,速度变化也非常大,空气密度、动压等相关参数变化剧烈,而且是非线性的;从另一方面来看,导弹自身的数学模型也是非线性的.这些都对PID驾驶仪的适用性及鲁棒性都提出了很大的挑战,而变结构控制是一类特殊的非线性控制,其非线性表现为控制的不连续性.这种控制方式与其他控制的不同之处在于系统“结构”并不固定,而是可以在动态过程中,根据系统当前的状态有目的地不断变化,使系统按照预定的“滑动模态”的状态轨迹运动[1].这种控制方法通过控制量的切换使系统状态沿着滑模面滑动,使系统在受到参数摄动和外干扰时具有不变性,具有很强的鲁棒性.变结构控制的这些特点都非常适合于导弹飞行这一非线性状态的控制,这也得到了越来越多人的关注.
1 变结构控制的简述
构成一个变结构控制系统主要是通过应用“滑模变结构控制”这一控制策略实现的。这种控制策略要求寻找一种控制方法和一个“滑模面”,系统在这种控制方法的控制下,强迫系统在滑模面附近,沿规定的状态轨迹做高频率、小幅度的上下运动.这样的运动是可以被设计的,与系统的实时状态及外界扰动无关.
可见,变结构控制系统的设计可以分为两个独立的部分,即:设计切换函数s(x)(滑模面),和设计滑模控制律u(x).一旦这两个函数确定,变结构控制系统也就建立起来了.两个函数设计方法及要求如下:
(1)s(x)设计要满足可达性
当x(0)这一系统初始点不在s=0上或是附近时,系统的运动轨迹必须要趋近滑模面s=0,即满足可达性条件,否则系统无法启动滑模运动,可达性条件为ss˙<0;同时,切换面函数s(x)满足可微以及s(0)=0.
(2)u(x)的设计方法

求解控制函数 u(x)使得系统x˙=f(x,u,t)可以在滑模面 s(x)上做滑模运动即可.常用的控制函数有三种:
ⅰ.常值切换控制:u(x)=u0sgn(s(x)).
ⅲ.函数切换控制:u(x)=ueq+u0sgn(s(x)),这里ueq为等效控制.
2 变结构自动驾驶仪模型建立与设计
导弹滚转通道传递函数为:

这里以舵机(执行机构)舵偏角δx做为输入信号,滚转角速度 γ为响应输出[2].在导弹飞行弹道中的某个特征点附近进行设计,在此特征点,kγ=-15.8751,Tγ=0.0702.
将其写为状态方程的形式如下:

其中,状态方程的状态变量为:x1=γ,x2=x1=γ,状态方程的输出量为:y=x1=γ,控制变量为:u=δx
设计变结构滚转稳定自动驾驶仪框图如图1所示:

图1 滚转稳定自动驾驶仪结构图
考虑到变结构控制策略的特点,下面的关键点在于设计一个合适的滑模面和一个合适的控制策略,使得系统状态可以在滑模面附近运动,达到满意的控制效果.前边已经介绍过,STT控制方式的导弹要求滚转通道稳定在一个小角度范围内,防止俯仰通道和航向通道发生耦合,也就是要求导弹的滚转角尽量小(滚转角等于 0°则是最佳控制效果).结合导弹控制要求及变结构控制的特点,可将滑模面设计为:

其中:C=[15 1].当在滑模面上或是附近运动时,系统两个状态变量的值都为零或是趋于零的小值,这样就保证了滚转通道的稳定;而矩阵C的选择则是调配两个状态量在滑模面中的权重,可以根据对两变量的限制要求进行选择.上述设计中,对滚转角的限制作用强于对滚转角速度的限制.
根据不同控制方式设计控制器的不同特点[1]发现,比例切换控制等不适用于导弹飞行控制,这主要是由于导弹执行机构(舵机)有一定的幅值和频率的限止,所以选择趋近律作为控制器的设计策略.趋近律是将系统运动分为趋近运动和滑模运动两部分,有利于抑制抖动,改善滑模运动特性.常用的趋近律主要有等速趋近律、指数趋近律、幂次趋近律以及一般趋近律.
(1)基于等速趋近律的驾驶仪设计

其中:ε=50,等速趋近律的趋近速度是由ε的大小决定.
当初始滚转角为5o,滚转角速度为0时,响应结果仿真图如图2所示.
图2中四幅仿真图分别是:滚转角响应、滚转角速度响应、控制器输出与滑模面运动图.对其进行分析发现,使用等速趋近率时,到达滑模面前的控制器有很好的输出特性,但到达滑模面附近后,输出具有高频率、大幅值的抖振,这对于控制器的物理实现来说,是几乎不可能的.从响应时间来看,等速趋近率的响应时间可以比较短,如果要实现快速响应则在设计时要求ε的取值很大,这将使系统运动到滑模面附近后,控制器输出有大幅值、高频率的抖振.
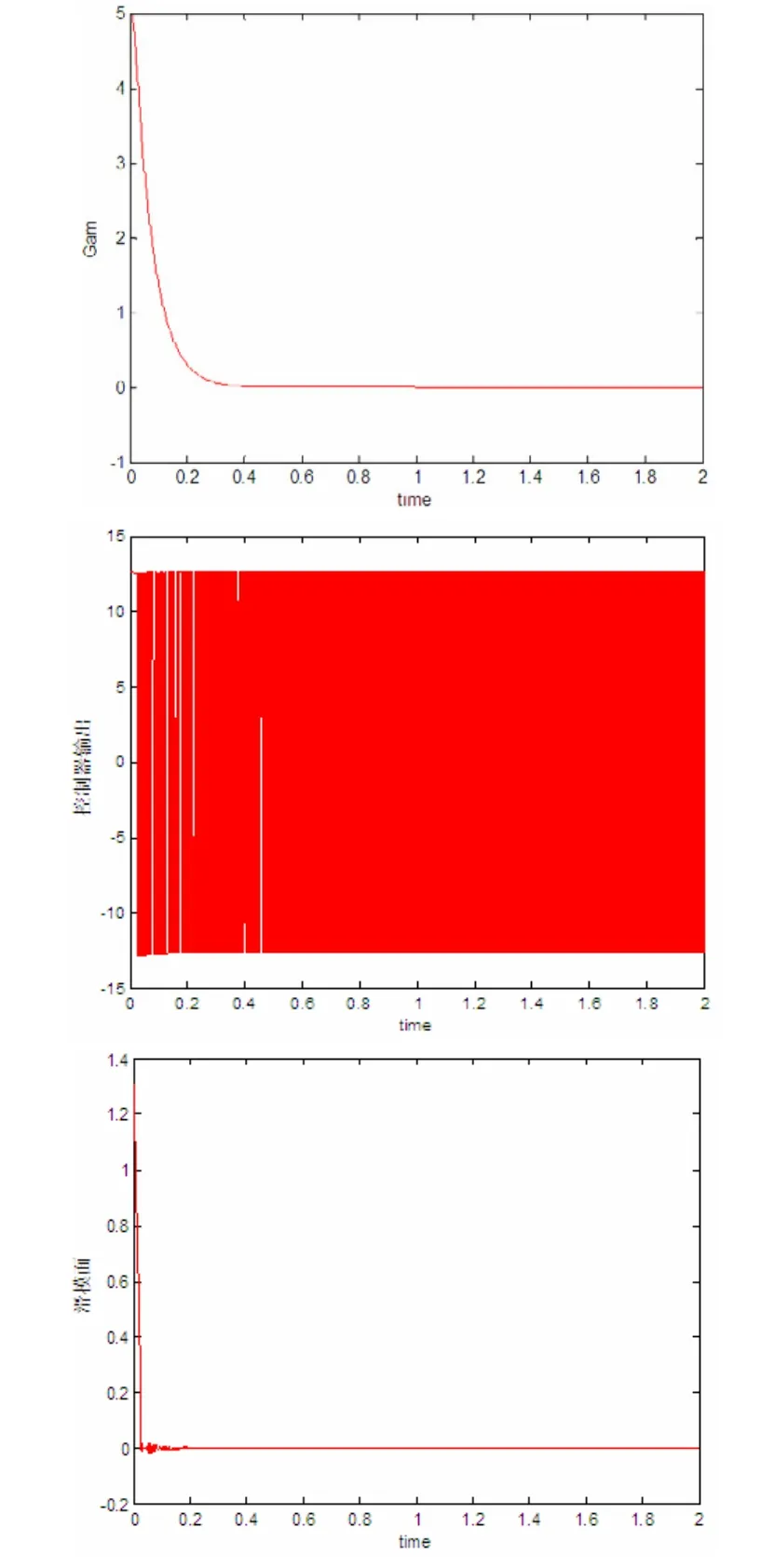
图2 等速趋近律驾驶仪仿真图
(2)基于指数趋近律的驾驶仪设计
通过上边分析,变结构驾驶仪要解决两个方面的问题:第一,在ε较小的情况下,要加速趋近运动;第二,去掉滑模面附近状态运动抖动.结合这两个要求,本文使用指数趋近律用以加快趋近运动的速度,使用准滑动模态控制解决在滑模面附近运动时的抖振问题.
趋近律形式为:

准滑动模态使用:

经反复验证,ε取为5,k取为10时可以兼顾快速趋近与减小滑模面附近运动抖振这两方面的要求.
方程(7)中δ是很小的正数,这称为“将切换函数的继电特性连续化”的方法.具体使用中,使用连续函数θ(s),取代符号函数sign(s),δ取在0.1左右.
当初始滚转角为5o,滚转角速度为0时;未加入准滑动模态时响应结果如图3所示:

图3 指数趋近律驾驶仪仿真图
由图3的各响应图可知,使用等速趋近率后,滑模面附近舵面的偏转幅值已经较小,只有±1o左右,而且并没有影响响应速度.但在滑模面附近控制器还是有高频抖振,执行机构依然无法在物理上实现这样的控制要求.如果使用这样的控制律,不但达不到良好控制效果,还会损坏舵机,所以还要改进.
加入准滑模面控制,即将方程(7)的作用考虑进去,用其替换方程(6)中的符号函数(sgn(s)),其中δ=0.05,初始滚转角及其角速度不变.响应结果仿真图如图4所示.
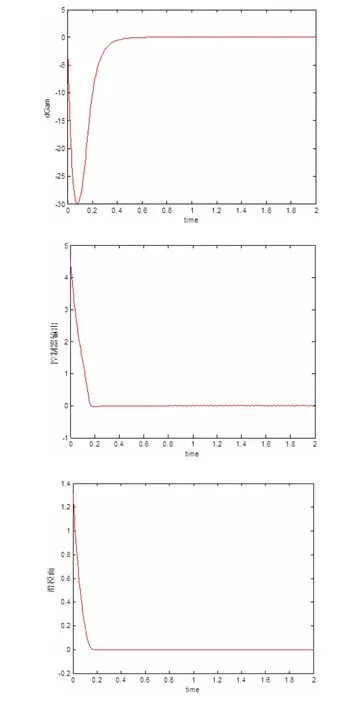
图4 加入准滑动模态的指数趋近律驾驶仪仿真图
对图4进行分析会发现,在保持了前边趋近律方式设计的滚转自动驾驶仪的各项特性的基础上,加入准滑模运动还去掉了系统运动在滑模面附近时控制器输出的高频抖振,这就保证了该驾驶仪在保证控制效果的前提下,在物理上也是可以实现的.
3 变结构滚转自动驾驶仪与 PID滚转自动驾驶仪控制效果对比
PID控制方式的自动驾驶仪结构如图5所示,主要通过调整 ks,kγ,kγ˙三个系数来调节系统的时域指标和频域指标[3].

图5 PID自动驾驶仪结构框图
这里在同一个特征点进行设计,kγ=-15.8751,Tγ=0.0702.其响应结果仿真图如图6所示.在该特征点,通过调整三个比例系数,阻尼为0.707,过渡时间0.35s左右.


图6 PID自动驾驶仪响应仿真图
将图5与图6进行对比分析发现,5°的初始滚转角通过0.35s左右就可以调整为0,两驾驶仪有响应速度都比较快,但是变结构驾驶仪在调整过程中没有超调,可以直接控制到0°,但PID驾驶仪会有9%左右的超调量;从滚转角加速度来看,PID驾驶仪最大到-50deg/s,而变结构驾驶仪只有-30deg/s,变结构驾驶仪效果较好;从对执行机构的要求来看,PID驾驶仪最在需求舵偏角达到了 10°,而且有一定超调存在,变结构驾驶仪最大舵偏只有4.5°左右就可以完成控制并且没有超调.
4 结束语
本文采用变结构控制理论,结合导弹滚转通道数学模型,设计了基于变结构控制理论的滚转稳定自动驾驶仪.设计过程中采用了指数趋近律设计,将滑模运动分为了趋近运动和滑模运动两部分,减小了系统在滑模在附近运动时的抖振;为了完全解决滑模面附过抖振问题,又引入了准滑模运动的理论,完成了去抖任务.最后,将所设计的变结构自动驾驶仪与传统PID设计方式的驾驶仪控制效果进行仿真对比,证明了变结构驾驶仪的优越性.本文只针对导弹弹道中的某特征点进行了设计,在实际应用中可以在全弹道的多个特征点进行设计,然后通过线性插值应用到全部弹道中,可以取得良好的控制效果.
[1]刘金琨.滑模变结构控制MATLAB仿真[M].北京:清华大学出版社,2005.
[2]P.Garnell. Guided Weapon Control Systems[M] (Second Revision by Prof. Qi Zai-kang and Xia Qun-li). Beijing: Beijing Institute of Technology.
[3]钱杏芳,林瑞雄,赵亚男.导弹飞行力学[M].北京:北京理工大学出版社,2008.
[4]高为柄.变结构控制理论及设计方法[M].北京:北京科学技术出版社,1996.
[5]王正林,王胜开,陈国顺.MATLAB/Simulink与控制系统仿真[M].北京:电子工业出版社,2005
[6]丁丽娟,程杞元.数值计算方法[M].北京:北京理工大学出版社,2008.
