一种合作目标轨迹的处理方法
2012-12-02翟春平杨国义
邵 军,翟春平,于 沨,杨国义
(大连测控技术研究所,辽宁 大连116013)
0 引 言
阵列信号处理是近30年来迅速发展的一个领域,在雷达、声呐、通信、地震信号处理、语音信号处理、射电天文等领域得到了广泛应用,并逐渐成为众多应用领域中核心技术和主要发展方向[1]。在舰船物理场测量过程中,有许多对目标进行定位的方法,其中就包括应用直线阵列技术的声图定位方法。声图定位是一种适用于近场的精确定位技术。它基于聚焦波束形成,通过补偿球面波的时延差形成同相位信号能量的叠加以获得聚焦点,从而实现对目标的定位。
所谓“合作目标”即定位目标按照实验要求进行航行。在实际测量过程中,由于聚焦波束形成声图测量的方法对测量深度、目标频率的敏感,导致目标航迹出现一定程度的抖动。这种情况在目标过阵时表现得尤为明显,因此严重影响了目标的定位。本文通过引入“圆筛”和α-β 滤波估计相结合的方法对测得的聚焦点进行处理,并将处理前后的定位轨迹进行对比,分析其定位性能的改善。
1 二维聚焦波束形成声图测量原理及其定位误差产生原因分析
聚焦波束形成技术的原理与常规波束形成类似,都是利用按一定几何形状排列的阵列接收目标信号,然后经过延时、加权、求和等处理形成空间指向性[2-4]。不同于常规波束形成的是,聚焦波束形成关注的是近场,利用球面波原理进行时延补偿,形成波束输出,获得二维的目标声源分布图,声图测量对点声源的响应称为“探针”。
二维聚焦波束形成声图测量原理图(图1)。由网格组成的平面为扫描平面,目标坐标(x0,y0,z0),扫描深度为z0,水平直线阵与X 轴平行,并以沉底等间距的方式布放。
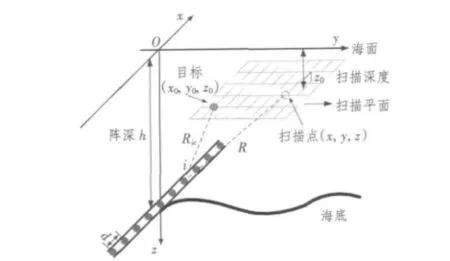
图1 二维聚焦波束形成声图测量原理图Fig.1 Diagram of UAIM
假设目标产生的信号为s(t),声速为c,Ric为目标噪声源到各阵元的距离,R 为扫描点到各阵元的距离,在不考虑多途的情况下,球面波形式衰减条件下各阵元接受的信号为
探针扫描区域时,将各阵元接收信号按扫描点的位置进行球面波时延补偿、加权,迭加后聚焦波束形成器的输出为

利用声图测量的定位方法在近场给出目标航迹的同时,也会产生再定位误差。首先,当扫描平面深度与目标的实际深度不符时,就会给定位带来误差,对于每个真实值会有1 个测量值与之对应,对应的关系完全由时延关系来确定[5]。当真实值和测量值到达阵元的时延相等时,直线阵认为2 个目标等效。进一步研究可知,直线阵在任意垂直于阵的平面上无指向性,即任意阵元到达等时延圆的距离都相等,如图2所示。垂直于阵的等时延圆上的S 和S0到达各个阵元的距离相等,因此,直线阵对于等时延圆上的任意2 个目标是无法区分的,扫描深度的误差会对目标过阵定位产生较大影响。其次,声图定位使用的是等效声源,由于受其频率、距离等影响,目标声源在声图上不可能是一个理想的亮点,而会有一定的面积,在这个面积内的点对声图来说是等效的,因而其定位轨迹会出现一些跳跃。
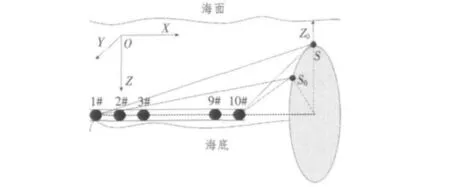
图2 等时延圆图Fig.2 The diagram of same delay points
2 目标航迹处理方法
2.1 圆筛原理
“圆筛”的思想缘于图像处理中的去除椒盐噪声干扰,它使用的条件是有效样本在50%以上[6]。设待处理样本为S(n),1 ≤n ≤N,N 为待处理样本的总数。设S(nk)为需要判断的样本点,则其判据为
设b 为待筛选样本的跳动容限,则S(nk)的判断门限为
当Q ≤Qm时,判断S(nk)为高质量点,否则判断为瑕点。设“圆筛”剔除瑕点之后的结果用F(n)表示,在筛选过程中,若样本点符合要求,则F(nk)=S(nk);若不符合要求,则用前一个样本点代替瑕点,即F(nk)=S(nk-1)。
2.2 α-β 滤波原理
跟踪滤波的目的就是根据声呐、雷达等录取设备提供的目标点迹参数来建立和更新轨迹,并外推下1 个扫描周期目标出现的位置[7]。常用的跟踪滤波器有Kalman 滤波器及在此基础上产生的很多改进算法。本文采用的α-β 滤波器,即Kalman 滤波器的稳态解形式。处理的结果证明,α-β 滤波器对匀速直线航行目标声图定位轨迹有良好的跟踪效果。
当目标做匀速直线运动时,可以用X=[x,x·]T描述目标运动状态。其中x 和x·分别表示目标的位置和速度。设目标的状态方程和测量方程分别为:

α-β 滤波器的滤波方程和外推方程分别为
其中,K=[α β/T]T。
设计α-β 滤波器的关键是确定增益系数α 和β。本文选用一种工程上常用的自适应跟踪算法增益系数[8],即
α(k)=2(2k+1)/[k(k+1)],
β(k)=6/[k(k+1)]。
本文分析的航迹为二维坐标,下面是其中的以X 坐标为例给出滤波器的预测方程和平滑方程,根据式(1)~式(4)可得:
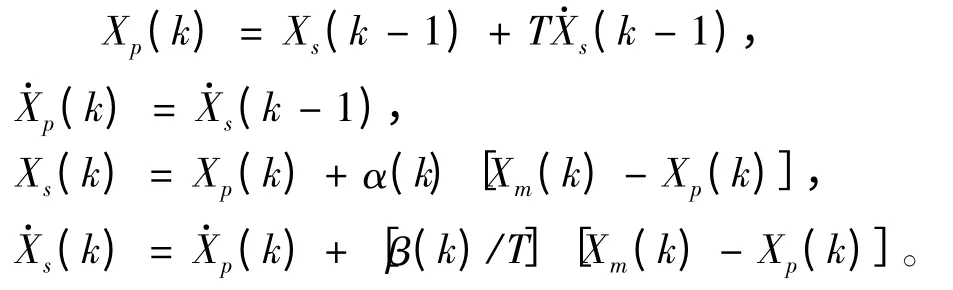
式中:Xp(k)和为滤波器第k 次预测位置值和预测速度值;Xs(k)和为滤波器第k 次滤波位置值和滤波速度值;Xm(k)为第k 次距离测量值。
2.3 目标轨迹的滤波处理
目标轨迹的α-β 滤波算法如图3所示。
目标轨迹的测量数据经过合适门限的“圆筛”剔除瑕点之后,通过α-β 滤波得到较好的预测值和估计值,最终形成一个效果良好的定位轨迹。本文分别将匀速直航轨迹的X,Y 坐标分别进行以上滤波过程,然后重新组合,最终完成轨迹的滤波处理。
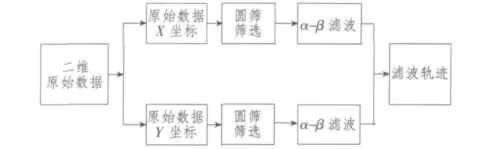
图3 α-β 滤波算法图Fig.3 The block diagram of α-β filter
3 实际数据的分析处理
3.1 实验概况
如图4所示,基阵由10 个声压水听器组成,阵元间距5 m,布放点水深约12 m,水听器距离海床高度约0.5 m,阵体与正北方向的夹角为156°。定位的目标为某单体实验船,并且垂直于基阵航行。
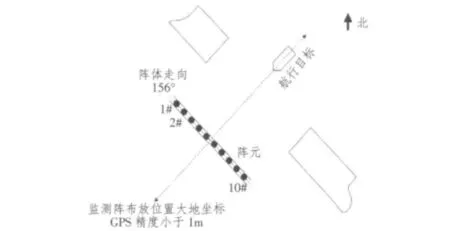
图4 实验概况图Fig.4 The schematic diagram of experiment of UAIM
3.2 实验条件
定位的初始位置是声图测量有效测量数据的起始值,目标航行速度为3 m/s,水听器阵列扫描的时间间隔为0.7 s,目标按要求进行匀速直线航行。将实验获得的有效数据进行“圆筛”及α-β 滤波处理。
3.3 实验数据处理
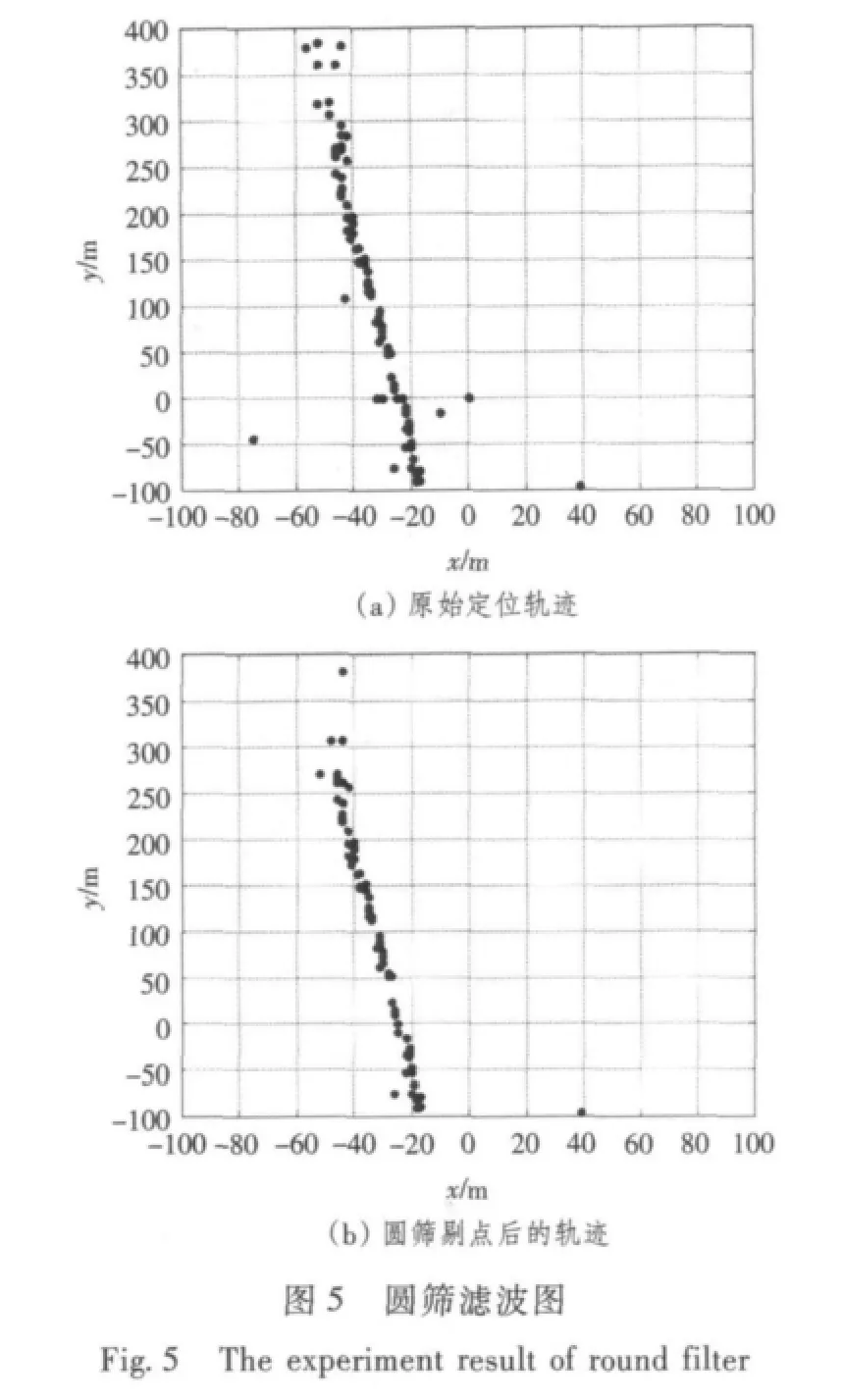
1)取一组有效数据,并使用“圆筛”剔除瑕点,处理过程如图5所示。
从图5 可看到,原始航迹数据经过“圆筛”去瑕点后,野点数目明显减少,尤其是过阵附近(阵布放在x=0 处)。由此可见“圆筛”方法可以有效抑制测量轨迹中野点的数目,有利于后续的滤波。
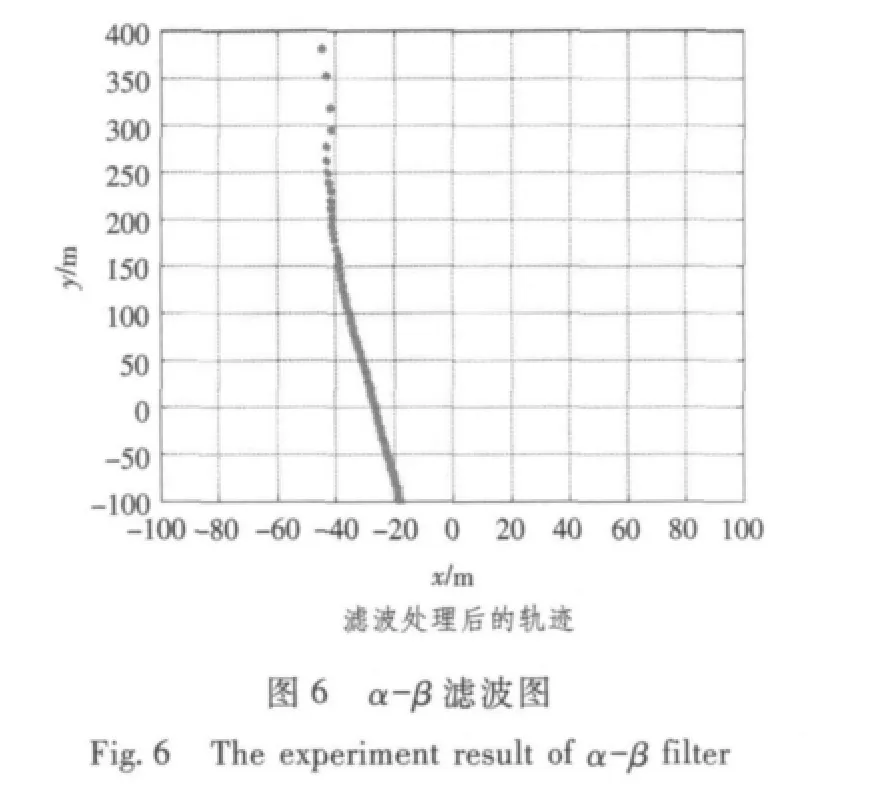
2)将“圆筛”剔除瑕点后的数据再进行α-β 滤波处理,处理过程如图6所示。
从图6 可看到,“圆筛”剔点后的航迹经过α-β滤波处理后,航迹变得更加清晰、平滑,有效解决了由于声图定位所产生的目标轨迹抖动现象。
3)将原始数据经α-β 滤波处理后数据以及GPS 数据进行对比,得到图7。
在图7(a)中,10 元直线阵以5 号和6 号阵元的中点为坐标原点,以布阵的方向为X 轴,垂直阵的方向为Y 轴。如图所示,目标轨迹经过α-β 滤波处理以后,与GPS 实际测量结果有很好的符合性,定位轨迹符合较好。图7(b)为过阵时定位轨迹的局部放大,可以看出,滤波以后的轨迹几乎和GPS 实测结果重合,证明了“圆筛”和α-β 滤波相结合的方法能有效减小匀速直线航行目标在过阵时的定位轨迹的偏离。
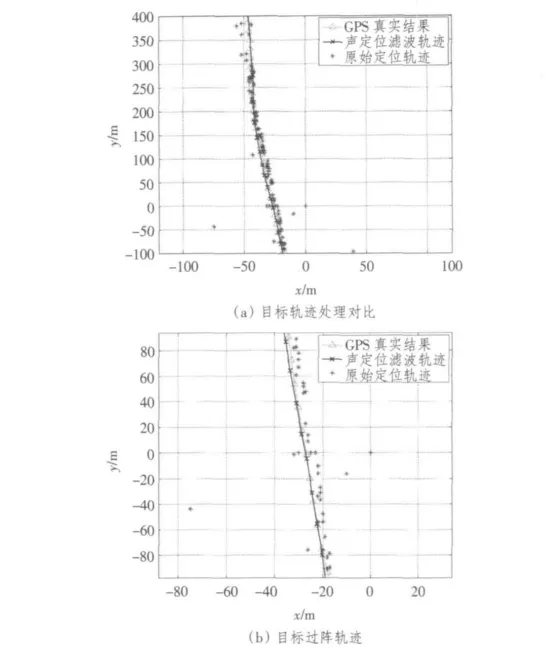
图7 圆筛和α-β 综合滤波图Fig.7 The experiment result of round filter and α-β filter
4 结 语
本文给出了1 种将“圆筛”和α-β 滤波相结合的方法,并用其对匀速直线运动的目标轨迹进行跟踪滤波处理。结果表明,这种方法可以减小过阵误差,并与声图定位的轨迹有很好的一致性。这种方法算法简单,运算量不大,故在匀速直航的条件下,用其对目标声源定位轨迹进行处理是可行的。但目标在非匀速直航的条件下,这种方法有一定的局限性,这也是需要继续改进的方向。
[1]Van TREES H L.最优阵列处理技术[M].汤俊,译.北京:清华大学出版社,2008.
Van TREES H L.Optimum Array Processing[M].Beijing:Tsinghua University Press,2008.
[2]惠娟,胡丹,等.聚焦波束形成声图测量原理研究[J].声学学报,2007,(4):357-359.
HUI Juan,HU Dan,et al.Researches on the measurement of distribution image of radiated noise using focused beamforming[J].Acta Acustica,2007,(4):357-359.
[3]胡丹.聚焦波束形成声图测量技术研究[D].哈尔滨:哈尔滨工程大学,2008.9-12.
HU Dan.Researches on the measurement of distribution image of radiated noise using focused beamforming[D].Harbin:Harbin Engineering University,2008.9-12.
[4]梅继丹.水声声图测量技术研究[D].哈尔滨:哈尔滨工程大学,2010.16-19.
MEI Ji-dan.Water sound plans measurement technology[D].Harbin:Harbin Engineering University,2010.16-19.
[5]翟春平,张明伟,刘雨东,等.水中近场目标三维精确定位方法[C].国防科技重点实验室基金项目.
ZHAI Chun-ping,ZHANG Ming-wei,LIU Yu-dong,et al.Three-sensor array of near field target in underwater[C].Key Laboratory Fund Item from Arming Ministry.
[6]周伟,惠俊英,梅继丹,等.三元阵被动测距浅海试验及后置处理[J].声学学报,2009,(3):220-221.
ZHOU Wei,HUI Jun-ying,MEI Ji-dan,et al.Experiment of passive ranging for three-sensor array in shallow water and post processing[J].Acta Acustica,2009,(3):220-221.
[7]张光义.相控阵雷达系统[M].北京:国防工业出版社,1994.
ZHANG Guang-yi.Phased array radar systems[M].Beijing:National Defense Industry Press,1994.
[8]何友,王国宏.多传感器信息融合及应用[M].北京:电子工业出版社,2000.
HE You,WANG Guo-hong.Multi-sensor information fusion with applications[M].Beijing:Publishing House of Electronics Industry,2000.
