快反系统中平面反射镜的轻量化设计
2012-11-06徐新行刘长顺
徐新行,王 兵,乔 健,刘长顺,时 魁
(中国科学院长春光学精密机械与物理研究所,吉林长春130033)
1 引言
快速控制反射镜(简称“快反”)是光学系统中校正光束传播方向和调整光路倾斜误差的关键性器件,对于光学元件因热变形等原因引起的光路偏移,可以起到一定的补偿作用,因此,被广泛应用于自适应光学、精密跟踪、目标指向和光束控制等领域[1-3]。
由于快反系统的谐振频率和响应速度要求较高,系统中反射镜要尽可能的轻,因此,目前常见的快反镜口径都比较小(大多不超过Φ 200 mm),然而,随着光学技术的迅速发展,快反系统的应用领域不断被拓宽,对大口径快反镜的需求也越来越大。反射镜作为快反系统的主要载荷,其口径的增大,一方面会直接引起系统负载和惯量的增加,进而限制系统谐振频率、控制带宽以及响应速度的提高;而且,反射镜作为快反系统中高速响应的光学部件,没有复杂的柔性支撑结构,仅靠简单的刚性固定方式,会对反射镜的面形造成影响,所以要求反射镜必须具有足够的刚度[4-6]。另一方面,快反镜口径的增大,致使运动中反射镜反射面因自重引起的变形量随之增加,进而影响整个系统的通光质量和工作性能。因此,在保证反射镜动、静态刚度和强度的前提下对其进行最大程度的轻量化十分重要。
本文选择比刚度大,热变形系数小的碳化硅为镜坯材料,采用背部开槽式结构减重,选择背部3点式支撑,对多种轻量化方案进行了有限元分析。
2 快反系统的设计要求
在车载高精度跟瞄系统中,快反镜主要用于精确控制发射光束的出射方向,最终实现对静、动目标的实时跟踪与瞄准,因此,对其灵敏性的要求较高。快反系统的主要性能指标包括:有效通光口径、跟踪范围、稳定精度和响应频率。表1列出了设计的快反系统所要满足的主要性能指标。
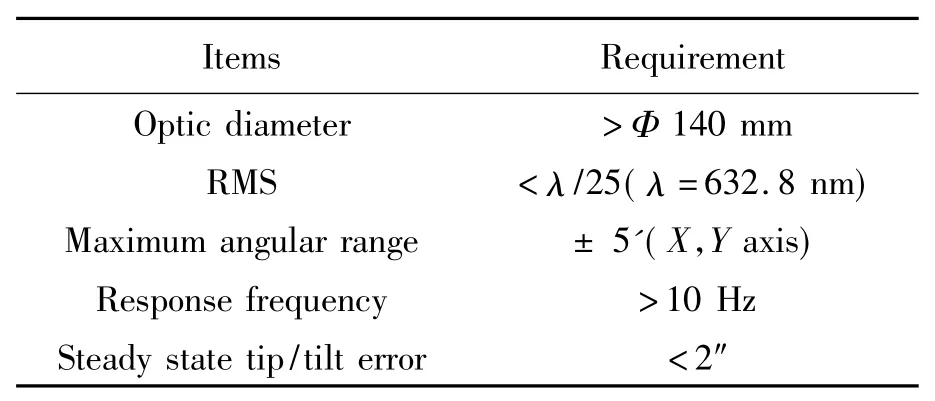
表1 FSM系统的主要性能指标Tab.1 Requisite performance conditions of fast-steering mirror system
3 反射镜的轻量化与支撑方式
3.1 反射镜的轻量化途径
反射镜的轻量化途径主要有两个:一是选用比刚度高、热变形系数小的坯体材料;二是选择合理的轻量化结构并确定最优的结构参数[7-10]。
在材料选择方面,为了使反射镜获得足够的光学面形精度,要求镜坯材料具有:(a)优异的力学性能,即选用高弹性模量、低密度的材料,有利于对反射镜进行有效的轻量化;(b)优异的热物理性能,即选用低膨胀系数、导热性能良好的材料,有利于实现反射镜各部分的热平衡,减小反射镜的热变形;(c)优良的光学加工性能,即镜坯材料必须能适应光学面形的加工要求或者能经受光学镀膜的工艺条件且可与反射膜结合;(d)优异的化学稳定性和安全性。
在轻量化结构选择方面,反射镜的减重方式主要有:(a)背面开孔或开槽式,如图1(a)所示,这类结构可以通过机械加工或铸造的方法实现,对反射镜的支承方式几乎没有限制,多用于地面光学系统中,轻量化率约为30% ~55%;(b)拱形结构,如图1(b)所示,可通过机械加工的方式实现,其轻量化率与背面开孔式差不多,但支承方式会受到结构形式的限制;(c)蜂窝式,如图1(c)所示,此类减重结构可以通过浇铸、高温熔接、熔接物封接等方法实现,轻量化率高达70%,但制造工艺复杂,技术难度大,价格昂贵。

图1 轻量化反射镜的主要结构方式Fig.1 Major lightweight structures of mirror
根据以上分析,并结合表2所列几种常用反射镜材料的性能对比,本文选择比刚度高、热变形系数小的碳化硅作为镜坯材料,采用背部开槽式结构减重,对反射镜进行了轻量化设计。

表2 常用反射镜材料的性能Tab.2 Performance of familiar mirror materials
3.2 反射镜的支撑方式
反射镜的支撑方式主要有中心支撑、侧面支撑和背部支撑3种。其中,中心支撑多用于大口径反射镜的定位,单独使用时镜面变形较大,因此常与其它支撑方式配合使用;侧面支撑是以反射镜的侧面为定位基准的一种支撑方式,它结构简单,无装配应力,但外形尺寸较大,不适于在体积较小的空间内使用;背部支撑是以反射镜的背部为定位基准的一种支撑方式,也是反射镜固定使用最多的结构形式[11-13]。
本文考虑到快反系统对运动部分质量的约束及空间体积的限制,选择背部支撑方式对反射镜进行固定。此外,由于反射镜工作过程中处于高频运动状态,要求反射镜的固定稳定、可靠,因此选择背部三点支撑的刚性固定方式(背部支撑点组成的三角形为等腰锐角三角形),在此基础上对反射镜的轻量化结构进行设计、分析。

图2 快反镜轻量化结构及其支撑点位置示意图Fig.2 Schematic diagram of structure of lightweight mirror of FSM system and its supporting point position
3.3 反射镜的轻量化结构
图2 给出了反射镜轻量化结构及其支撑点位置的示意图,所设计反射镜的外形尺寸为:210 mm×145 mm×20 mm(长 ×宽 ×厚)。如图所示,在反射镜外形尺寸及其支撑方式一定的情况下,影响反射镜面形精度与轻量化效果的结构参数主要有镜面厚度和加强筋宽度。本文采用MSC.Patran有限元分析软件,针对反射镜的轻量化结构参数对反射镜刚度和面形精度的影响进行了仿真计算,以便了解其影响规律,进而确定最优的结构参数,实现最佳的轻量化效果。
4 反射镜的轻量化分析及实验检测
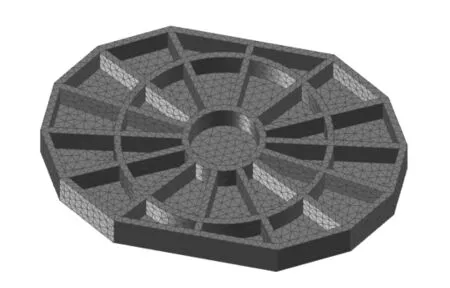
图3 快反镜的有限元分析模型Fig.3 Finite element model of lightweight mirror
首先采用UG设计软件对反射镜的轻量化结构进行三维实体建模,然后导入MSC.Patran分析环境中,并采用自由网格划分方式对模型进行四面体有限元网格划分。考虑到模型的复杂性及其对计算精度的要求,反射镜模型共由34 987个节点,19 049个单元网格组成,如图3所示。最后,根据反射镜的实际使用情况,对镜体的3种主要使用状态(平放、立放—短轴竖直、斜放—短轴与水平面成45°)分别进行模拟仿真。其中,主要对模型施加重力场(g=9.8 m/s2)、刚性支撑(如图2所示,反射镜背面3支撑点固定约束,模型正面对应点处施加F=10 N的预紧力)等边界条件进行分析计算。由于该模型为完全对称式结构,因此,在实际计算时也可以只计算反射镜的1/2模型,在对称面进行对称约束处理以符合实际情况。
4.1 轻量化结构对快反镜刚度的影响
图4为反射镜在支撑预紧力和重力作用下3种不同状态时的变形云图。可以看出,反射镜在水平状态下反射面的变形最大。如图4(a)所示,除支撑点区域外,镜面的最大变形发生在镜子长轴两端,且偏向单点支撑一侧,而短轴两端镜面的变形量相对较小。因此,在设计此类长条形反射镜时,可以考虑长轴两端区域和背部加强筋相对密集一些,以提高镜体的整体刚度。而短轴两端区域和背部加筋相对分散一些,以利于镜体轻量化率的提高。图5为反射镜在重力作用下的应力分布云图。反射镜的应力集中主要分布在反射镜背部的加强筋上,因此为了保证反射镜在振动、冲击等恶劣的工作环境下仍具有稳定可靠的面形精度,反射镜的筋宽不宜过小。
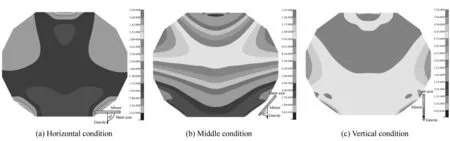
图4 刚性支撑预紧力及重力作用下快反镜反射面的变形分布云图Fig.4 Distribution maps of deformation of reflecting surface under gravity and rigid supporting forces

图5 重力作用下快反镜应力分布云图Fig.5 Stress distribution graph of mirror under gravity
4.2 筋宽对快反镜刚度的影响
在反射镜厚度为20 mm、镜面厚度为4 mm不变的情况下,分别取加强筋宽度为2、4、6、8 mm建立镜体的轻量化结构模型,相应的有限元分析结果如表3所示。从表3可以看出,反射镜的最大应力及反射面的最大变形量随着加强筋宽度的增大而减小,即反射镜的刚度随着筋宽的增大逐渐改善。但当筋宽增大到一定程度时,镜体刚度的改善程度减缓;反射镜的轻量化率则随着筋宽的增大而减小。结合反射镜面形的设计要求(RMS值<λ/25=25.3 nm)和当前的机械加工工艺,本设计选择反射镜的筋宽为4 mm。

表3 不同筋宽快反镜的各项性能参数Tab.3 Performance parameters of mirrors with different rid widths

表4 不同镜面厚度快反镜的各项性能参数Tab.4 Performance parameters of mirrors with different mirror thicknesses
4.3 镜面厚度对快反镜刚度的影响
在反射镜厚度为20 mm、加强筋宽为4 mm不变的情况下,分别取镜面厚度为2、4、6、8 mm建立镜体的轻量化结构模型,有限元分析结果如表4所示。
从表4可以看出,反射镜的最大应力及反射面的最大变形量随着镜面厚度的增大而增大,同时,反射镜的轻量化率随着镜面厚度的增大而减小。因此,在机械加工工艺允许的条件下,应尽量选择较小的镜面厚度。这里结合反射镜面形的设计要求(RMS值<λ/25),选择镜面厚度为4 mm。
4.4 实验检测
对有限元优化设计出的反射镜进行了实际加工制备,毛坯镀金后的实物照片如图6所示,并用Zygo干涉仪对装配后反射镜中心有效口径部分进行了面形精度检测。检测结果如图7所示,反射镜反射面的 RMS值不超过 λ/30(λ=632.8 nm),与分析结果相符,满足系统的设计要求。由此可知,采用有限元法对反射镜进行结构轻量化设计,可靠实用,尤其对价格昂贵的镜坯材料更具优势。
图6 快反镜的实物照片Fig.6 Photograph of SiC mirror
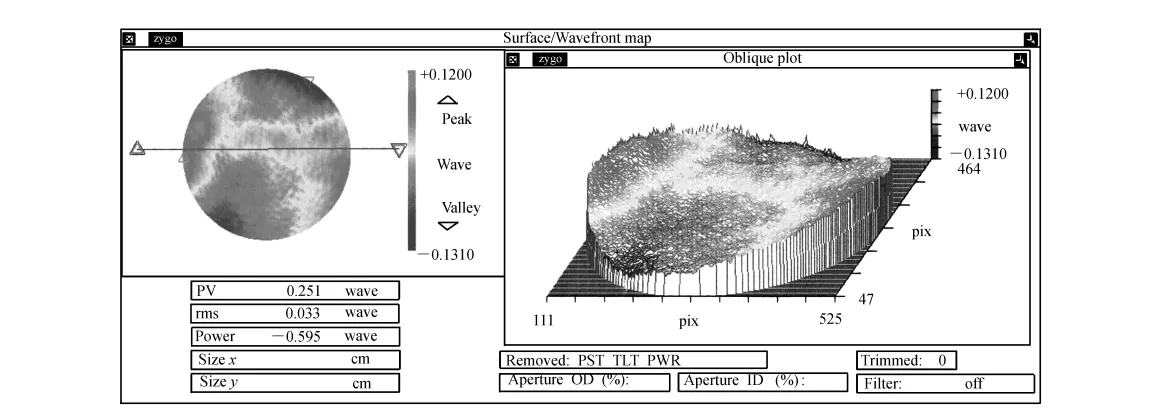
图7 快反镜的面形精度检测结果Fig.7 Measurement result of reflecting surface
5 结论
从快反系统中平面反射镜的设计要求出发,采用有限元分析的方法对快反镜的轻量化结构进行了优化设计。分析结果表明:在反射镜外形尺寸一定的情况下,筋宽越大,镜体刚度越好,当筋宽增大到一定程度时,反射镜刚度的改善程度减缓;镜面越厚,镜体的内应力、自重变形越大。因此,本设计在现有机械加工工艺条件下,结合反射镜的要求,确定并制备了筋宽为4 mm,镜面厚度为4 mm的碳化硅反射镜,镜体轻量化率达55%。最终,实测反射镜的面形精度,其RMS值不超过λ/30,与分析结果相符,满足系统的使用要求。
[1]鲁亚飞,范大鹏,范世珣,等.快速反射镜两轴柔性支承设计[J].光学 精密工程,2010,18(12):2575-2581.LU Y F,FAN D P,FAN SH X,et al..Design of two-axis elastic support for fast steering mirror[J].Opt.Precision Eng.,2010,18(12):2575-2581.(in Chinese)
[2]MORGAN F E,WASSONA S R,LONDON J J,et al..Large,high performance,fast steering mirrors with FPGA-embedded controls[J].SPIE,2009,7466:74660H-1.
[3]徐新行,王兵,韩旭东,等.音圈电机驱动的球面副支撑式快速控制反射镜设计[J].光学 精密工程,2011,19(6):1320-1325.XU X H,WANG B,HAN X D,et al..Design of fast-steering mirror with spherical pair supporting structure driven by voice coil actuators[J].Opt.Precision Eng.,2011,19(6):1320-1325.(in Chinese)
[4]国绍文,王武义,张广玉,等.空间光学系统反射镜轻量化技术综述[J].光学仪器,2005,27(4):78-82.GUO SH W,WANG W Y,ZHANG G Y,et al..Lightweight mirror technology for space optical systems[J].Opt.Instruments,2005,27(4):78-82.(in Chinese)
[5]周超,杨洪波,吴小霞,等.地基大口径望远镜结构的性能分析[J].光学 精密工程,2011,19(1):138-144.ZHOU CH,YANG H B,WU X X,et al..Structural analysis of ground-based large telescopes[J].Opt.Precision Eng.,2011,19(1):138-144.(in Chinese)
[6]闫勇,金光,杨洪波.空间反射镜结构轻量化设计[J].红外与激光工程,2008,37(1):97-101.YAN Y,JIN G,YANG H B.Lightweight structural design of space mirror[J].Infrared and Laser Eng.,2008,37(1):97-101.(in Chinese)
[7]陈夫林,张景旭,吴小霞,等.620 mm薄镜面的主动支撑结构及面形校正[J].光学 精密工程,2011,19(5):1022-1029.CHEN F L,ZHANG J X,WU X X,et al..Supporting structure of 620 mm thin primary mirror and its active surface correction[J].Opt.Precision Eng.,2011,19(5):1022-1029.(in Chinese)
[8]刘辉,于清华,裴云天.大口径反射镜轻量化结构比较及面形分析[J].光电工程,2009,36(11):70-74.LIU H,YU Q H,PEI Y T.Light-weighted structure contrast and deformation analysis of the large mirror[J].Opto-Electronic Eng.,2009,36(11):70-74.(in Chinese)
[9]刘秀敏,何斌,沙巍,等.空间相机主反射镜的拓扑优化设计[J].中国光学与应用光学,2010,3(3):239-244.LIU X M,HE B,SHA W,et al..Topological lightweight design of primary mirror in space camera[J].Chinese J.Optics and Appl.Optics,2010,3(3):239-244.(in Chinese)
[10]YODER Jr P R.Opto-Mechanical Systems Design[M].3rd ed.Bellingham:SPIE Press,2006.
[11]王忠素,翟岩,梅贵,等.空间光学遥感器反射镜柔性支撑的设计[J].光学 精密工程,2010,18(8):1833-1841.WANG ZH S,ZHAI Y,MEI G,et al..Design of flexible support structure of reflector in space remote sensor[J].Opt.Precision Eng.,2010,18(8):1833-1841.(in Chinese)
[12]曾勇强,傅丹鹰,孙纪文,等.空间遥感器大口径反射镜支撑结构型式综述[J].航天返回与遥感,2006,27(2):18-23.ZENG Y Q,FU D Y,SUN J W,et al..Summary of support structure patterns of large mirror for space remote sensor[J].Spacecraft Recovery&Remote Sensing,2006,27(2):18-23.(in Chinese)
[13]李志来,徐宏.长条形空间反射镜及其支撑结构设计[J].光学 精密工程,2011,19(5):1039-1047.LI ZH L,XU H.Design of rectangular space mirror and its support structure[J].Opt.Precision Eng.,2011,19(5):1039-1047.(in Chinese)