轮控过驱动刚体航天器姿态机动与约束控制分配
2012-11-04张爱华秦玉平
霍 星, 张爱华, 秦玉平
(渤海大学 工学院, 辽宁 锦州 121013)
轮控过驱动刚体航天器姿态机动与约束控制分配
霍星,张爱华,秦玉平
(渤海大学 工学院, 辽宁 锦州 121013)
针对过驱动航天器系统转动惯量未知与姿态机动控制的问题,考虑执行机构的动态响应特性,设计了反步法的鲁棒自适应控制器。利用Lyapunov方法分析其系统的稳定性,提出基于约束最优二次规划的算法,实现期望指令到冗余飞轮的指令分配,引入一个松弛变量扩展优化解集,证明了分配后控制力矩的平稳性和能量的最优性。采用Simulink软件对某型轮控刚体航天器的姿态机动任务进行了仿真研究。结果表明,该方法能够实现快速和高精度控制过驱动航天器姿态。
航天器; 反作用飞轮; 自适应反步法; 约束控制分配
0 引 言
过驱动航天器姿态控制系统在外部干扰及不确定情况下的可靠性、稳定性,以及自主运行能力,一直是航天控制的目标。针对此问题,学者进行了大量的研究,主要有反馈控制、最优控制、滑模变结构控制、自适应控制等鲁棒控制算法及其组合方法[1-4]。其中反步法[5]在处理非线性问题上具有较强的优势,被航天器姿态控制研究者所关注。例如文献[6]针对自旋刚体航天器设计基于反步法的最优控制器,解决了逆最优控制问题。文献[7]利用航天器和行星探测器在高轨道承受的太阳光压力矩,基于非线性自适应反步法设计姿态机动控制并考虑了参数的不确定性。文献[8]利用航天器的跟踪误差方程基于有效的反步控制方法设计的姿态跟踪控制器,能实现快速机动和控制力矩受限。但上述文献并未考虑航天器的过驱动控制系统情况。
航天器姿态控制系统是一个典型的过驱动控制系统,对于一个过驱动控制系统的设计,一般分解为控制器的设计和控制分配两部分[9]。所谓控制分配就是根据系统要求和执行机构的特性将控制器输出的指令力矩合理地分配到每一个执行机构。现有方法主要有伪逆法、直接分配法、链式分配法、数学规划法和动态控制分配等[9-12]。例如文献[13]采用伪逆法实现控制分配,减少航天器大角度姿态机动时间,同时克服单个飞轮最大力矩受限问题,提高了卫星快速机动能力。文献[14]提出基于PD控制律零空间修正伪逆法的动态控制分配算法,并考虑飞轮最大力矩等约束,能有效地抑制姿态敏感器的噪声。但上述文献并未考虑执行机构的动态响应过程,同时忽略了各种控制分配的约束问题。
结合工程实际情况,考虑航天器转动惯量和外部干扰未知的条件下,设计基于反步法的鲁棒自适应控制器以实现对航天器的期望控制,保证了姿态控制的高精度和快速性。同时,在考虑到执行机构的物理约束情况下,采用最优约束二次规划的控制分配算法实现控制力矩的优化分配。
1 航天器姿态机动模型
1.1误差四元数方程
欧拉角描述方法存在奇异值,采用的四元数描述航天器的运动学方程[15]为
(1)

式中:I3——3×3的单位矩阵;





(2)
将式(1)分别代入式(2)求导,整理可得姿态机动误差四元数方程:
(3)
(4)
1.2姿态机动模型
考虑典型的金字塔型安装的四反作用飞轮作为航天器的执行机构,如图1所示。其中每个反作用飞轮的旋转轴垂直于金字塔型的相对应的面,每个面相对于水平面的倾斜角为β。带四个反作用飞轮的刚体航天器的总角动量[15]:
H=h+hW,
式中:h——刚体航天器的角动量,h=Jω;
J——航天器的转动惯量;
hW——四个反作用飞轮的总角动量。
飞轮的角动量hW为
hW=JWωW,
ωW——飞轮的角速度,ωW=[ωW1ωW2ωW3ωW4]T。

图1 金字塔型斜装四飞轮模型
Fig. 1A typical pyramid mounting arrangement of four reaction wheels
定义D(β)为飞轮的安装矩阵:
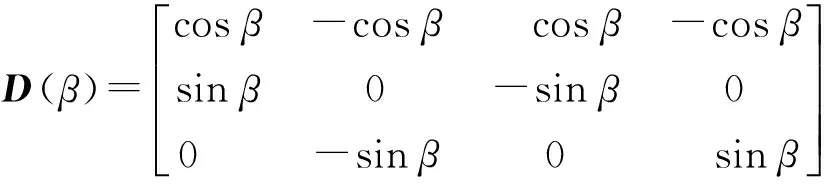
由角动量定理可得旋转刚体航天器的动力学方程:

式中:N——外部的力矩输入。
结合飞轮和刚体航天器的动力学可以得到带飞轮动力学的航天器姿态机动模型为

(4)人力资源管理综合实践技能竞赛实践与修正。面向我校学生开展竞赛活动,总结经验与不足,对竞赛规则与方案进行修正。
式中:d——航天器器系统的干扰力矩。
为了便于控制系统的设计,给出如下假设:
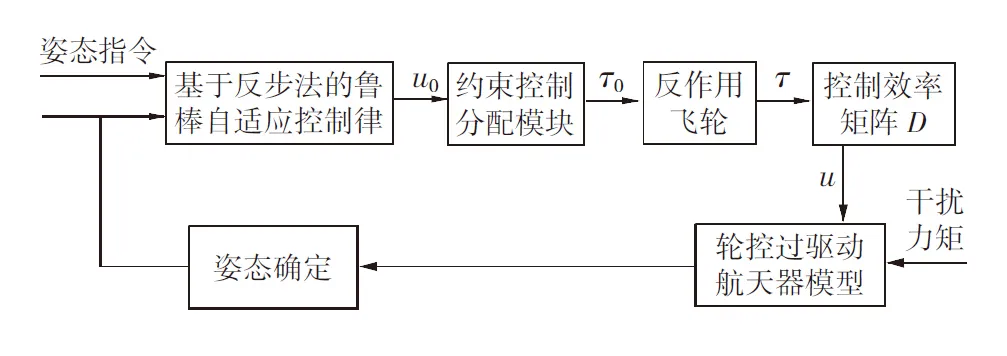
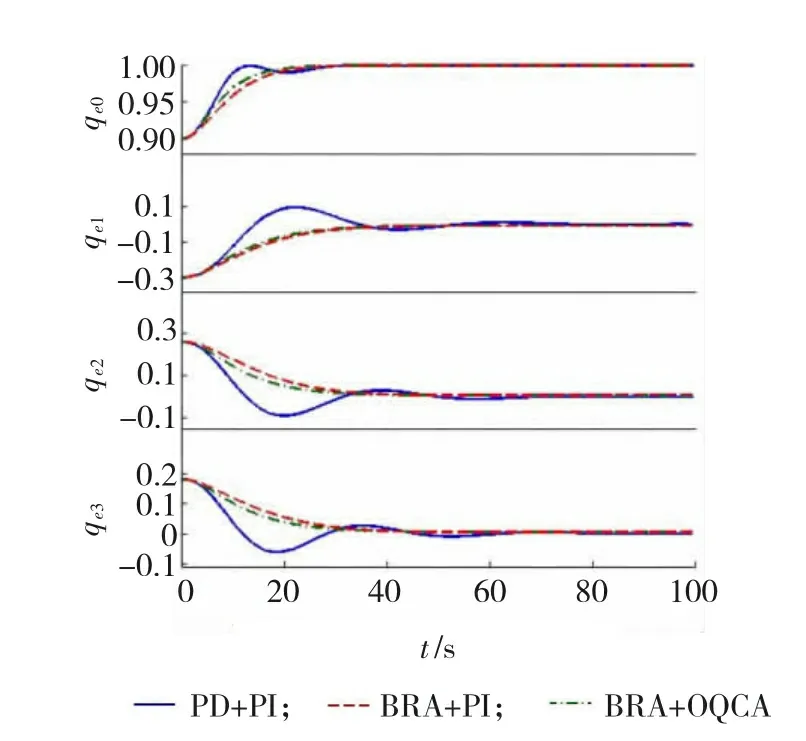
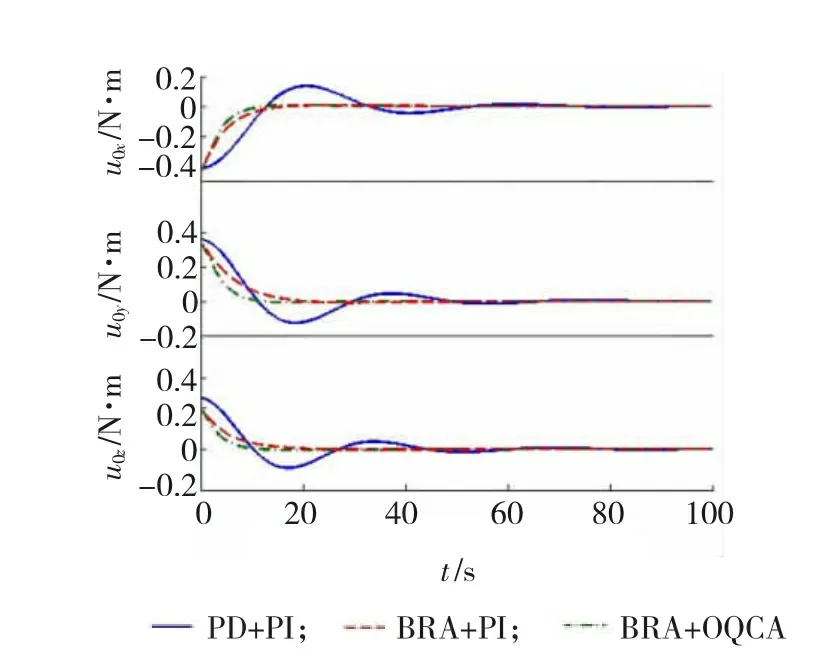
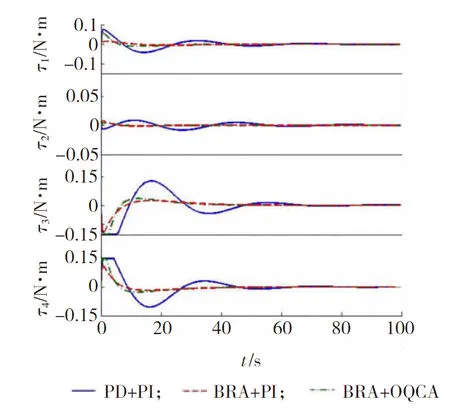
假设1航天器的转动惯量J是未知且正定对称的常值矩阵,存在常数Jmin、Jmax使得0 假设2干扰力矩d未知但是有界,且满足‖d‖≤d0,d0为未知的正常数。 注1‖·‖表示的是向量的2范数及其诱导的矩阵范数。 注2由于负载及深空的外部环境对航天器的影响,使其转动惯量J是时变的、不确定的,但这些因素对航天器的干扰产生的不确定性毕竟是小量,且航天器受到的干扰力矩也是有限的,故假设1、2成立。 设期望控制力矩 式中:v——反作用飞轮的输入电压,对角矩阵,v∈RN; KW——电机增益常数; TW——电机时间常数,对角矩阵。 综合以上分析,带反作用飞轮动力学的航天器的姿态机动模型: (5) 针对反作用飞轮存在冗余的情况下,设计一类基于反步法与约束控制分配相结合的方法来实现控制目标,其结构如图2所示。控制系统可分解为基于反步法的鲁棒自适应控制律设计和控制分配算法两部分。其中,前者根据对象动力学特性和控制目标得到总的控制指令(伪指令),而后者则是在综合考虑执行机构物理约束(控制受限等)的基础上,将伪指令合理分配至冗余的执行机构中,以获得期望的系统响应。 图2 鲁棒自适应反步法的动态控制分配系统 Fig. 2Backstepping based dynamic control allocation for spacecraft system 为了匹配不确定非线性控制系统,非线性阻尼是抵消系统不确定性的有效方法。为了方便后续的分析与设计,给出以下引理: 引理给定连续时间非线性系统: 对任意的x(t)∈RN,t∈R,设V(x,t)是系统的Lyapunov函数,且满足以下不等式: λ1‖x(t)‖2≤V(x,t)≤λ2‖x(t)‖2, 式中,λ1、λ2、λ3、ε为正常数,则该系统是全局一致最终有界稳定的。 基于反步法进行控制律设计,为了便于控制律的设计,定义新的变量: p1=∫qevdt, (6) p2=qev, (7) p3=ω, (8) 式中,p1、p2、p3——新的状态变量,p1、p2、p3∈R3; 对式(6) 、(7) 、(8)求导,则有: (9) (10) (11) Step 1为了稳定系统式(9),定义p2为虚拟控制量,再定义 (12) 式中:x1、x2——新的状态变量,x1、x2∈R3; α1(x1)——待定的镇定函数。 取Lyapunov函数为 (13) 对式(13)求导 取镇定函数 α1(x1)=-k1x1, (14) 式中,k1——正常数。 整理后式(14): 因此,当x2→0时,子系统式(9)是镇定的。 Step 2为了稳定子系统式(10),定义p3为虚拟控制量,再定义 x3=p3-α2(x1,x2), (15) 式中:x——新的状态变量,x3∈R3; α2(x1,x2)——待定的镇定函数。 定义的Lyapunov函数: 求导有 取镇定函数α2(x1,x2)为 α2(x1,x2)=-Ξ-1(x1+k1x2+k2x2), 式中,k2为正常数,则 因此,当x3→0时,子系统式(10)是镇定的。 Step 3由式(11)和式(15)有 -p3×Jp3-p3×Dh+u+d+ JΞ-1(x1+k1p2+k2x2)+ JΞ-1((1+k1k2)p2+(k1+k2)p3)。 (16) 定义线性算子L:R3→R3×6: Jϑ=L(ϑ)Θ。 对式(16)整理有: L(Ξ-1((1+k1k2)p2+(k1+k2)p3))。 (17) (18) 式中:k3、k4、 μ——待定的正常数; Γ——正定的对称矩阵,Γ∈R6×6。 定理对于存在未知转动惯量和未知干扰力矩的航天器姿态机动系统式(3)~(5),在假设1、2的限定下,式(17)给出的鲁棒自适应控制律和式(18)给出的参数自适应调节律,可保证系统是全局一致最终有界稳定的。 证明选取Lyapunov函数: (19) I3——三维的单位矩阵; 0——适当维数的零矩阵; Λ——正定对称矩阵; 则有 (20) 式中:λmin(Λ)——矩阵Λ的最小特征值; λmax(Λ)——矩阵Λ的最大特征值。 对式(19)进行求导,有 (21) 将控制律式(17)和自适应律式(18)代入式(21)整理有 (22) 考虑: (23) 再选择参数k4使得k4≥d0,则 (24) 将式(22)、(24)代入式(21)有 控制分配是一个控制扩展和稳定的过程,它要达到的目的是,通过控制分配指令使每一个可利用的执行器输出期望的控制力矩,进而满足系统要求。定义u∈Rm是控制器的输出,为指令控制向量;τ∈Rn是控制分配后的控制向量,为虚拟控制向量。可以用线性关系: u=Dτ, 其中,D∈Rm×n反作用飞轮的安装矩阵,表征的是飞轮的控制效率,反应的是飞轮的输出力矩到控制器的期望力矩的一个映射,又称为控制效率矩阵;当n>m时,反作用飞轮冗余,为过驱动控制,这是进行控制分配的必要条件;当n (25) 式(25)描述的是一个典型的问题,具有唯一解: τ=D†u, 式中,D†=R-1DT(DR-1DT)-1。 注3针对式(25)所描述的控制分配问题,Ola Harkegard指出:采用2范数描述的控制分配更能有效的将期望控制合理的分配到每一个执行机构,其优化问题的解一般随某一参数变化而连续变化且唯一;而1范数描述分配控制问题经常导致执行机构处于饱和状态,且其解也达不到理想状态。所以均采用2范数的控制分配优化模型。 考虑到工程实际问题,定义控制力矩的可行域为 式中:τmin、τmax——控制力矩的最小值与最大值。 为了解决如上控制分配问题,定义如下约束二次优化问题[16]: (26) 其中,R、Q是相应维数的正定权值矩阵;权值矩阵Q的选取应大于R,此时,当τ∈Ω时松弛变量s≈0。松弛变量s可以扩展优化问题的解的集合,保证了在τ∈Ω时的控制指令力矩的近似分配原则;当其趋近于零时,可以得到一个很好的控制分配效果。 为了方便以上优化问题的求解,定义:z=[τT,sT]T,x=u;然而式(26)可以重构为 (27) 此外,假设控制系统的外干扰力矩定义: 根据以上仿真参数,对轮控刚体航天器的姿态机动控制系统进行仿真。图3和图4给出了航天器姿态控制系统的角速度和误差四元数响应曲线。 可见,设计的鲁棒自适应控制器BRA能快速平稳的达到姿态稳定并能很好的抑制系统的外界干扰,且稳定时间约为30 s,而传统的PD控制器的稳定时间约为80 s。从图3可以看出,文中所设计的控制方案的角速度的超调量明显小于PD控制,并趋于最优轨迹;图4中,所设计的方案的姿态四元数的稳定精度也明显高于传统的控制方案。 图5和图6分别给出的是控制器输出的控制指令力矩u0和控制分配后执行机构输出系统的实际控制力矩u。 图3 姿态控制系统的角速度响应 图4 姿态控制系统的误差四元数响应 图5 控制器输出的控制指令力矩u0 Fig. 5Time responds of control demand torquesu0derived from controller 图6 执行机构控制分配后系统的实际控制力矩u Fig. 6Time responds of actual control torquesuafter control allocation 在控制力矩初始值相近的情况下,PD控制器的幅值超调量远大于BRA控制,且稳定时间约为60 s;而BRA的稳定时间约为25 s,且有相对较小的超调与波动。从图6可以看出,经过文中的方案BRA+OQCA后,控制系统的实际力矩u(虚线)的三轴力矩都相对最小,不仅具有最小的最大力矩,最小的超调与幅值波动,还具有最平稳光滑的轨迹;这也在反应了所设计的约束控制分配方案OQCA体现了能量最优的原则。 图7与图8分别显示了控制分配后输入执行机构的指令控制力矩τ0和执行机构输出的实际控制力矩τ。 图7 输入执行机构的指令控制力矩τ0 图8 执行机构输出的实际控制力矩τ Fig. 8Time responds of actual output control torquesτfrom actuators 图9 控制分配中松弛变s的响应曲线 图10 自适应参数的时间响应曲线 针对过驱动航天器恣态控制系统未知转动惯量与外部干扰等问题,考虑到执行机构的内部动态响应特性,设计基于积分反步法的鲁棒自适应控制器,并在此基础上采用约束最优二次规划的算法实现期望指令到冗余飞轮的指令最优控制分配。将文中所提出的方法应用于某一航天器,仿真结果表明,该方法在保证航天器姿控性能的前提下,能够实现控制力矩的优化分配。与其他方法相比,设计的控制器和动态控制分配方案简单实用,具有一定的工程实用价值。 [1]ROSS I M, SEKIHAVAT P, FLEMING A, et al. Optimal feedback control: foundations, examples, and experimental results for a new approach[J]. Journal of guidance control and dynamics, 2008, 31(2): 307-321. [2]CRASSIDIS J L, MARKLEY F L. Sliding mode control using modified Rodrigues parameters[J]. Journal of Guidance Control and Dynamics, 1996, 19(6): 1381-1382. [3]LIM H C, BANG H. Adaptive control for satellite formation flying under thrust misalignment[J]. Acta Astronautica, 2009, 65(1/2): 112-122. [4]CHEN Y P, LO S C. Sliding-mode controller design for spacecraft attitude tracking maneuvers[J]. IEEE Transactions on Aerospace and Electronic Systems, 1993, 29(4): 1328-1333. [5]KRSTIC M, KANELLAKOPOULOS I, KOKOTOVIC P. Nonlinear and adaptive control design[M]. Wiley-Interscience, New York, 1995. [6]KRSTIC M, TSIOTRAS P. Inverse optimal stabilization of a rigid spacecraft[J]. IEEE Transactions on Automatic Control, 1999, 44(5): 1042-1049. [7]SINGH S, YIM W. Nonlinear adaptive backstepping design for spacecraft attitude control using solar radiation pressure[J]. IEEE Transactions on Aerospace and Electronic System, 2005, 41(3): 770-779. [8]KIM K S, KIM Y. Robust backstepping control for slew maneuver using nonlinear tracking function[J]. IEEE Transactions on Control Systems Technology, 2003, 11(6): 822-829. [10]DURHAM W. Constrained control allocation[J]. Journal of guidance control and dynamics, 1993, 16(4): 717-725. [11]BORDIGNON K A. Constrained control allocation for systems with redundant control effectors[D]. Virginia Polytechnic Institute and State University, 1996. [12]JOHANSEN T A, FOSSEN T I, BERGE S P. Constrained nonlinear control allocation with singularity avoidance using sequential quadratic programming[J]. IEEE Transactions on Control Systems Technology, 2004, 12(1): 211-216. [13]CHOI Y, LEEGHIM H, BANG H. Efficient control torque distribution approach for spacecraft attitude control[C]//AIAA Guidance, Navigation and Control Conference and Exhibit, Honolulu, Hawii, [s.l.]:[s.n.], 2008: 67-71. [14]张世杰, 赵亚飞, 陈闽, 等. 过驱动轮控卫星的动态控制分配方法[J]. 航空学报, 2011, 32(7): 1260-1268. [15]OGATA K. Modern control engineering[M]. [s.l.]: Prentice Hall PTR, 2001. [16]JOHANSEN T A, FUGLSETH T P, TENDEL P, et al. Optimal constrained control allocation in marine surface vessels with rudders[J]. Control Engineering Practice, 2008, 16(4): 457-464. (编辑李德根) Robust attitude maneuver and constrained control allocation for over- actuated rigid spacecraft with redundant reaction fly-wheels HUOXing,ZHANGAihua,QINGYuping (College of Engineering, Bohai University, Jinzhou 121013, China) Aimed at the uncertain inertia matrix of over-actuated spacecraft system and attitude maneuver control, this paper proposes robust adaptive backstepping control as a result of allowing for dynamic response characteristics of drive mechanism and describes an analysis of the system’s stability using Lyapunov functions. The paper presents an algorithm based on the optimal unconstrained quadratic program to achieve a change from the desired instruction to the redundant flywheel instruction distribution and verifies control torque stability and energy optimization following the assignment by introducing a slack variable extension of optimal solution set. The numerical simulation of an attitude maneuver mission of a rigid spacecraft with redundant by using the MATLAB/Simulink software prove that the method allows a quicker and accurate control of over-actuated spacecraft attitude. rigid spacecraft; reaction fly-wheel; adaptive back-stepping; constrained control allocation 1671-0118(2012)06-0597-07 2012-10-24 辽宁省教育厅重点实验室项目(LS20100180);辽宁省教育厅科学计划支持项目(2009A045, L20100009) 霍星(1963-),男,满族,山东省黄县人,高级实验师,硕士,研究方向:航天器姿态控制,E-mail:hmyi888@163.com。 V448.22 A

2 反步法的鲁棒自适应控制器






























3 约束二次规划的控制分配



4 仿真结果与分析








5 结束语
