基于PIC单片机的步进电动机控制系统设计
2012-10-31童修伟
童修伟
(菏泽学院,山东菏泽 274000)
0 引 言
步进电动机是将电脉冲信号转变为角位移的开环控制执行机构。由步进电动机的实际矩频特性和速度频率特性可得,转子的速度与脉冲的频率成正比关系,脉冲数决定转子的起停,而不受负载变化的影响,非常易于单片机控制。并且其具有电路廉价、跟随性良好、可靠性高等优点,使得步进电动机在一些对速度、位置控制精度要求较高的领域得到了广泛的应用。
在步进电动机的实际运行过程中,由加速度频率特性可得,如果运行频率大于起动频率时,步进电动机会发生失步现象。同样,当运行频率突然停止时,步进电动机会由于惯性作用产生过冲现象,造成位置不精确。如果频率过低,步进电动机的速度又会太慢。所以加减速过程控制的好坏直接决定了步进电动机的控制精度。在不发生失步和过冲现象的前提下,使步进电动机从一个位置快速精确地移动到另一个位置是本文要解决的关键问题。本文采用对S型加减速曲线微分化的方法。微分化(线性化)后将得到一系列的不同速度,而后根据不同的速度值和时间间隔求出相对应的转速序列,而后将其转化成一系列的常数值,存储在数组中。在程序运行中,使用类似查表的方法从数组中调出相应的每一段的时间常数,以提高执行速度。而步进电动机的点位控制则是由二个参数来完成的,达到了对步进电动机精确控制的效果。
1 硬件分析
步进电动机驱动电源如图1所示。

图1 步进电动机驱动电源方框图
步进电动机需要一个专门的驱动电源,驱动电源控制的好坏直接决定步进电动机运行的好坏。在驱动电源中,只需控制其中的脉冲分配器,因为其他部分只需设计硬件即可达到相应的要求。在这里有二种方法实现脉冲分配:软件法是用单片机的PWM口不停地产生PWM波,这样会占用大量的CPU时间,而且运行速度较慢。因此相对于软件法,硬件法更具有优势。所谓硬件法就是用脉冲分配器芯片实现换相控制。由于采用了脉冲分配器,单片机只需利用其CCP模块中的脉宽调制模式发出脉冲进行速度和转向的控制,在接下来的脉冲分配过程中,脉冲分配器主要把脉冲信号加在脉冲放大器上,因此大大提高了运行速度。本文采用硬件法。在众多的芯片中选择8713集成电路芯片。8713脉冲分配器与PIC16F877的接口实例如图2所示。

图2 8713脉冲分配器与PIC16F877接口电路图
2 步进电动机的速度控制
2.1 S型加减速曲线的分析
本文是在对S型加减速曲线线性化(离散化)的基础上,得到定时常数序列,进而利用查表的方法重装定时常数。S型升降频曲线线性化图如图3所示。
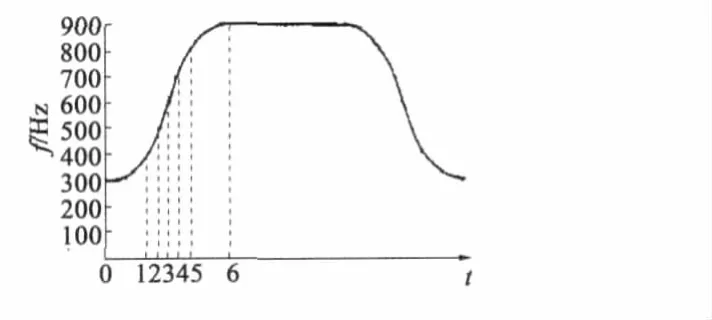
图3 S型升降频曲线的线性图
分析图3可知,线性化,即是对S型升降频曲线进行微分化,由微分知识可得,每一个速度微分阶段都可以看成平滑直线。每一个微分阶段所持续的时间即可用下列公式表示:
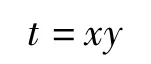
式中:x为速度级数;y为比例常数。
2.2 针对线性化的S型加减速曲线的程序设计
设计加减速总步数为30步,步进电动机在加速过程中一直对这个总步数进行递减操作,当减至为零时表示加速过程完毕,转入恒速过程。同样在此过程中一直对这个总步数递减,减至为零时表示恒速过程结束,进入减速阶段。减速过程与加速过程相反。
利用查表方法设计的软件流程图如图4所示。

图4 S型加减速曲线的流程图
3 步进电动机的位置控制
3.1 步进电动机的点位分析
步进电动机的一大优点就是位置控制,因为其位置与脉冲数具有一一对应的线性关系,位置控制不需反馈只需单片机提供的脉冲个数就能准确定位,而且定位精度高。在本控制系统里主要采用的是参数法,通过设定二个参数来控制步进电动机的位置。第一个参数是我们设定的初始值,即步进电动机当前的具体位置。第二个参数我们称之为相对参数,主要设定从当前位置移动到目标位置的距离。在此控制系统中主要采用键盘程序将这个位置折算成电机的步数。只需设定这二个参数就可以实现位置的精确控制。
3.2 基于2个位置参数(绝对位置参数和相对位置参数)的程序设计
此程序设计同样是在图2的硬件基础上进行的,所有的操作都在定时器中断程序中完成。每次中断都改变一下RA0的状态,即每二次中断步进电动机才走一步。具体的程序流程图如图5所示。
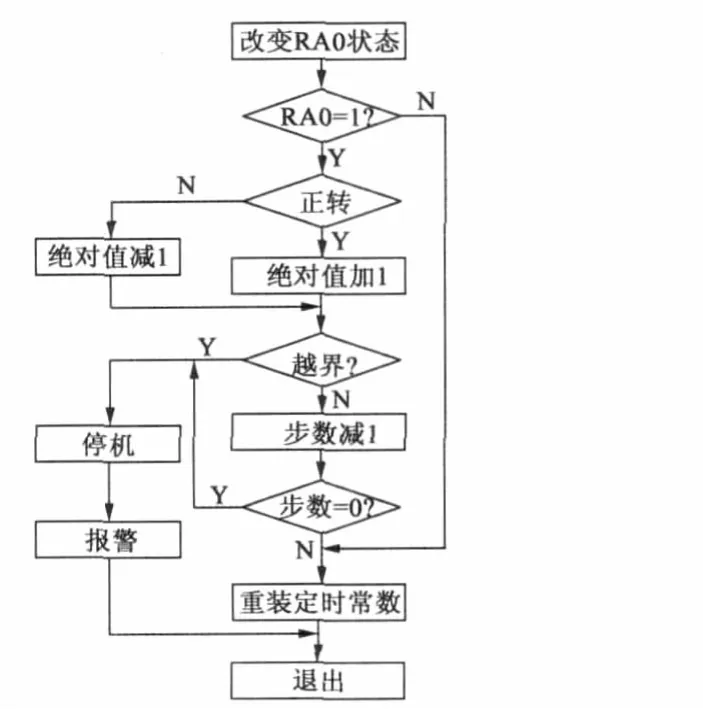
图5 点位控制流程图
4 实验结果
本实验采用的是六线四相制步进电动机,选用八拍方式对四相步进电动机控制。分别测得角度与位置数据与理论值的对比结果如表1所示。
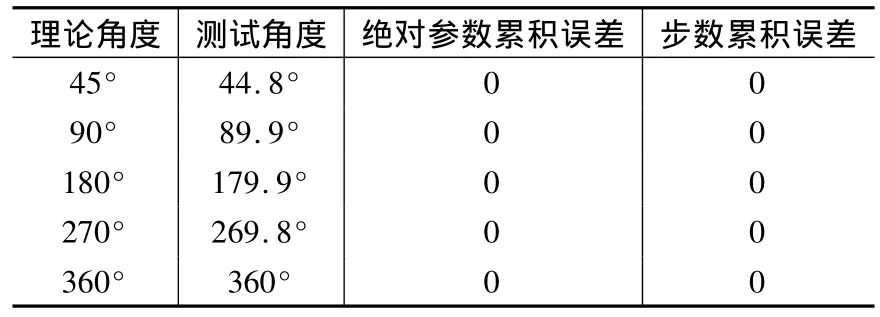
表1 实验结果
5 结 语
本文的控制系统编程时创造性地利用了查表法、参数法,很好地解决了步进电动机在运行过程中存在的失步、过冲等现象。该控制系统的良好性能已在作品《智能循日采光系统》(该作品获得2011年山东省机电产品创新大赛一等奖)中得到了很好的验证。在该作品中,控制系统实现了采光板对太阳实时追踪、精确定位的良好效果。同时该控制系统也在项目《基于太阳能电池板的立体旋转屏》(获得菏泽学院大学生科研训练计划立项)中实现了对旋转屏速度和位置精确控制的良好效果。该控制系统还在我校实训中心和实验室里的数控机床上得到了广泛的应用。经多次试验,用C语言编写的该控制系统实现了步进电动机在工作频率内运行平稳、定位精度高等效果,是一款成本较低、经济实用的控制系统。
一个好的控制系统还得具有较好的通用性和保护功能。此控制系统可以驱动多种步进电动机,并且除在程序中设计了看门狗还设计了过电流保护功能。
[1]王有绪.PIC系列单片机接口技术及应用系统设计[M].北京:北京航空航天大学出版社,2000.
[2]秦增煌.电工学[M].第7版.北京:高等教育出版社,2009.
[3]王晓明.电动机的单片机控制[M].北京:北京航空航天大学出版社,2002.
[4]花同.步进电机升降速控制技术的研究[J].科技创新导报,2011(25):61.
[5]王建,张玉峰,李磊.步进电机加减速控制技术研究[J].工矿自动化,2006(6):65-67.
[6]谭浩强,张基温.C语言程序设计教程[M].北京:高等教育出版社,2006.
[7]王玉琳,王强.步进电机的速度调节方法[J].电机与控制应用,2006,33(1):53 -56.
[8]常毅.基于单片机的步进机控制研究[J].制造业自动化,2011(9):16-18.
[9]张烈剽.基于单片机的高精度步进电机控制研究[D].武汉理工大学,2007.
[10]杨冬霞,范长胜.椭圆形镜框加工中步进电机的控制研究[J].林业机械与木工设备,2010(2):31-33.