低成本的永磁同步电动机控制系统仿真
2012-10-31王东萃傅振兴
倪 攀,王东萃,傅振兴
(上海汽车集团股份有限公司技术中心,上海 201804)
0 引 言
永磁同步电动机矢量控制系统离不开对转子位置的检测。当前常用的永磁同步电动机转子位置传感器有光电编码器、旋转变压器、线性霍尔和开关型霍尔等。除了开关型霍尔,其它几种位置传感器都价格偏高,不适用于对成本较为敏感的行业(如家电行业)。而无位置传感器技术当前在理论和技术上不够完善,实现起来难度较大,且在起动和低速时的转子位置估算误差较大。开关型霍尔的特点是价格低,只能提供离散的转子位置信号,无法单独实现永磁同步电动机的矢量控制。因此,综合考虑成本、可靠性以及开发难度等因素,选用开关型霍尔作为位置传感器,再配之以合适的转子位置估算方法实现,永磁同步电动机矢量控制的方案具有广泛的应用价值。
本文采用id=0的矢量控制策略,并用速度、电流双闭环搭建永磁同步电动机控制系统仿真模型。转子位置检测装置采用两相开关型霍尔。电机转动时得到四个离散的开关信号。转子角度估算模块通过这四个离散的霍尔信号再使用合适的角度估算方法估算转子的实际角度和实际转速。本文使用常用的几种角度估算方法搭建仿真模块并加以运行比较,对于不同的需求可选用不同的角度估算方法。
1 永磁同步电动机id=0矢量控制策略
对电机的的各种控制归根结底是对电机转矩的控制。永磁同步电动机的转矩矢量方程如下:

式(1)说明,在旋转dq轴系内通过控制is的幅值和相位,就可控制永磁同步电动机的转矩。由于转子永磁体产生的磁链恒定不变,可采用磁场定向得旋转坐标系的d轴方向与ψf方向一致,q轴为逆时针方向超前d轴电角度。通过Clarke变换和Park变换可得到如图1所示的矢量图。因此由式(1)可得:


图1 永磁同步电动机矢量图
式(2)表明:在这种情况下,只要控制iq就可以控制电磁转矩的大小。这就是id=0的控制思想,即控制β=90°电角度。is=jiq,定子电流全部转化为转矩电流。图1中虽然转子以电角度ω旋转,但是在dq轴系中ψf与is始终保持相对静止。从转矩生成的角度来看,面装式永磁同步电动机可等效为他励直流电动机。
2 基于开关型霍尔的角度估算方法
当转子转动时,霍尔元件输出的位置信号为两相相差 90°、脉宽 180°电角度的方波,这些信号把360°的电角度划分为4个90°的位置区间,如图 2所示。因此,根据霍尔信号可判断永磁体转子在哪个区间。
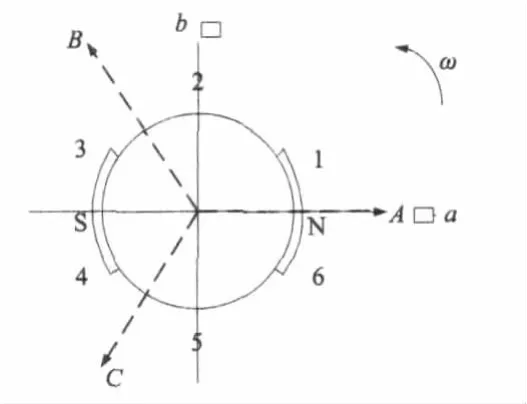
图2 开关霍尔元件与转子磁场的相对关系
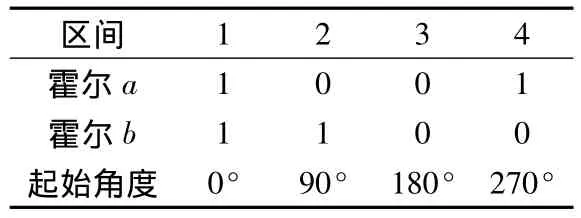
表1 霍尔与区间对应关系
对于永磁同步电动机转子位置检测方法的应用成本,基于两相正交锁存型霍尔相对基于三相对称锁存型霍尔较低,并且降低了安装误差的影响,电机在高速运转时较基于三相对称霍尔所需的角度估算次数少,并且因为转速快,动态误差也相差无几。基于单个锁存霍尔的永磁同步电动机转子位置检测方法相对前两种方法,应用成本最低,并且避免了前两种方法在安装过程中所产生的霍尔位置不对称误差。但是单个霍尔不能提供电机的转向信息,只能提供速度和位置信号,这对于如洗衣机等需要频繁正反转的场合并不适用。另外在电机加减速运行时,该方法相对于前两种方法得到的位置检测误差更大。转子位置的估计方法可通过硬件数字电路实现,也可由软件算法完成。本文介绍4种软件算法实现,省略了外围硬件电路。
(1)匀速时转子位置估算——方法一
此方法是用转子转过前一个扇区的平均速度假定为当前扇区的速度。当前扇区的平均速度ωid由转子经过前一个扇区所需时间算出。当前的转子位置θid等于该扇区的起始角度θi加上从θi旋转经过的角度。计算公式如下:

式中:T为采样周期;k为ti到tid间的采样周期次数。
(2)非匀速时转子位置估算——方法二
当电机匀速运行时,采用上一个位置估算法得到的转子位置信号与实际转子位置信号一致。但当电机转速变化时,由上述算法得到的转子位置信号就存在较大的误差了。对于此问题,文献[3]将一阶算法中引入电机平均加速度的概念。其分析如图3所示。

图3 霍尔信号区间
其算法是:

式中:ωid的当前扇区速度:

加速度ai-1由前一个扇区和前两个扇区的平均速度计算出来:

因此,式(4)可转化为:

(3)改进型非匀速时转子位置估算——方法三
为了获得更高精度的角度位置,文献[6]提出也可对式(5)进行改进。由于式(5)中的ωi-1是上个扇区的平均速度,因此它不是ti时间点的速度。理论上在电机加速时,以它为初速度算出来的ωid会低于实际速度。因此,通过对方法二中的速度估算公式的改进可以达到增加角度估算精度的目的,而该方法中的其他计算公式仍沿用方法二中的公式。对式(5)进行如下改进:

(4)低速时转子位置估算——方法四
为了解决电机低速运行问题,文献[4]提出不顾电机的实际速度,直接使用用户要求的速度来计算转子的即时位置。即ωid不通过计算得到,直接为系统的给定速度。这样大大降低了运算器的运算负荷,在低速时也可获得不错的运行性能。
3 转子位置校正
在电机的实际运行过程中,利用上述方法进行转子位置预估,角速度的波动是不可避免的。例如起动、突然加速、加载降速等情况产生的角速度的变化会使转子空间角度的估算产生很大的误差,造成电机运行不稳定。估算的角度误差主要由稳态估算误差和动态估算误差两部分组成。稳态估算误差是指由于采样周期的量化误差和由于计数器位数造成的有限字长效应。动态估算误差主要由ωr的预估误差引起。为了保证在此情况下的转子转角计算结果不超出或太滞后所在位置区间的临界值,位置信号及时校正是必须的。因此在以上各种估算方法中都需要加入转子位置校正,以提高系统的稳定性。转子位置校正就是在每次霍尔信号来临后,将转子位置重新校正。基本方法是在霍尔信号每次变化时,不管之前的计算角度结果如何,都按表1的起始角度开始估算。反转时,只要将起始角度都加上90°电角度即可。这样,每90°电角度就会发生一次转子角度校正,保证了系统的抗干扰性。
4 角度输出仿真模块
(1)霍尔信号产生模块
为了搭建基于两相对称霍尔的系统,我们必须自己搭建双霍尔信号产生模块的。可以参考如图4所示的方法搭建。

图4 霍尔产生模块
(2)角度校正模块
每当霍尔信号改变时,不管哪种角度估算方法都需要角度校正或者说需要一个区间的初始角度,这样可以增加系统的稳定性。校正仿真如图5所示。

图5 角度校正模块
该模块要放在Triggered Subsystem模块,触发源是两相霍尔信号。Trigger type设为either,即有上升沿或下降沿霍尔触发脉冲时都能触发此模块。两个霍尔元件按二进制的形式计算,得到的值再根据电机的旋转方向判断在哪个扇区,给出不同的角度初始值。如正转则按照表1给定角度初始值,反转则需在表1的基础上每个初始角度加上90°电角度。
(3)速度估算模块和角度计算模块
以速度估算方法二为例,搭建模块如图6所示。
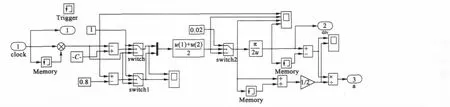
图6 方法二中的速度估算

图7 方法二中的角度计算
5 系统仿真模型搭建和验证
在本设计中,我们直接选用MATLAB R2010A中的SimPowerSystems仿真工具箱中已有的逆变器模块。永磁同步电动机参数设置为:极数p=4,额定转矩0.8 N·m,电压310 V(DC),额定转速3000 r/min。系统总框架图如图8所示。
图8包括:霍尔信号生成模块,四种角度估算方法模块、转速电流PI调节模块、abc_to_dq转换模块、inverse Park模块、SVPWM模块、逆变器、永磁同步电机和多个示波器模块。PWM载波周期为0.0001 s。给定速度为3000 r/min,电机负载起动,负载转矩为0.8 N·m。本文给出的永磁同步电动机控制系统仿真结果是基于角度估算方法二,其它角度估算方法给出角度估算输出曲线。
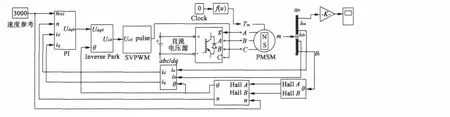
图8 系统仿真框图
整个永磁同步电动机控制系统的电流,转速和转矩如图9所示。
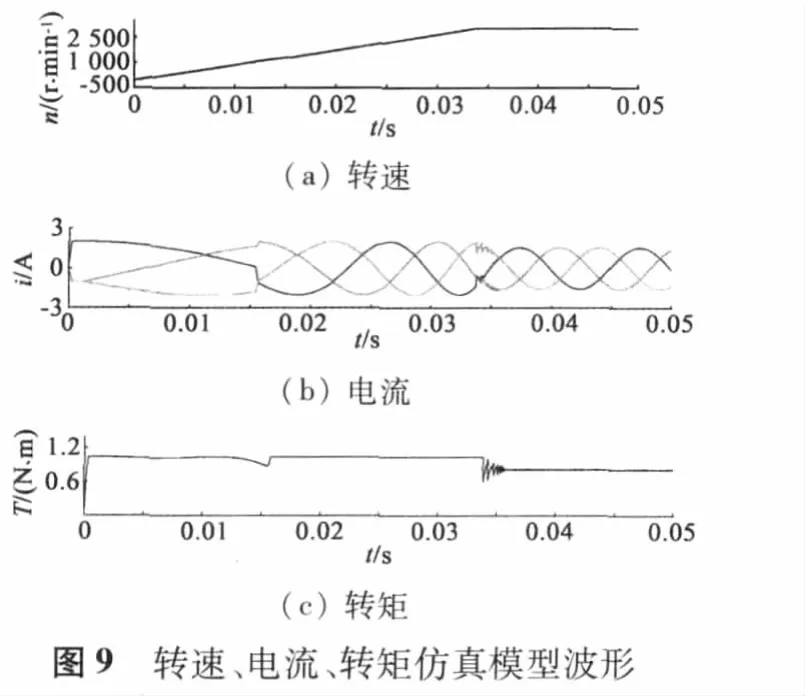
从图9中可以看出转速能较平滑起动。定子三相电流在起动之初有波动,也导致了电机转矩在起动时有小波动,但马上回归正常。电机在达到额定转速后也能马上调整到稳定状态。
图10是定子dq轴电流波形图。从图中可以看出,d轴电流在起动时会有大的波动,而后在零值附近波动。d轴电流在起动时的波动主要是由于起动时角度估算的误差造成。q轴电流在起动之初也会有波动,但马上归于稳定,并且在转矩变化时,也能快速达到稳定状态。
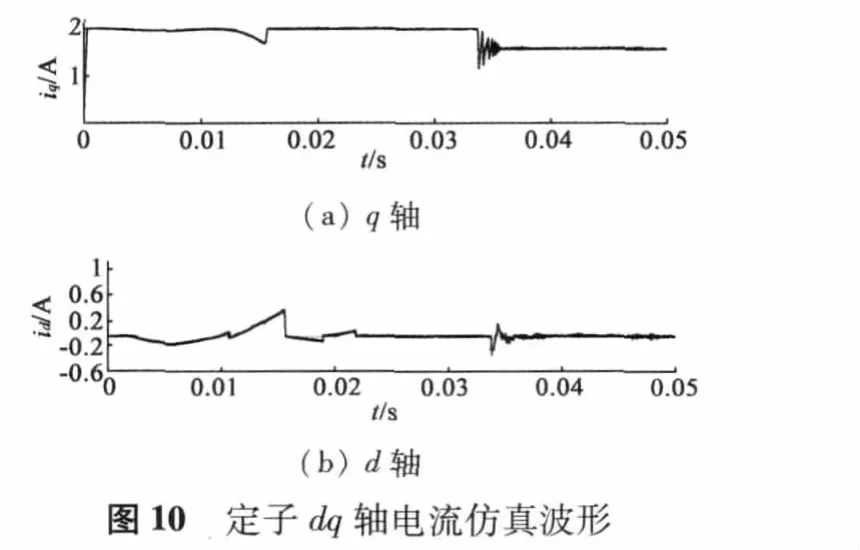
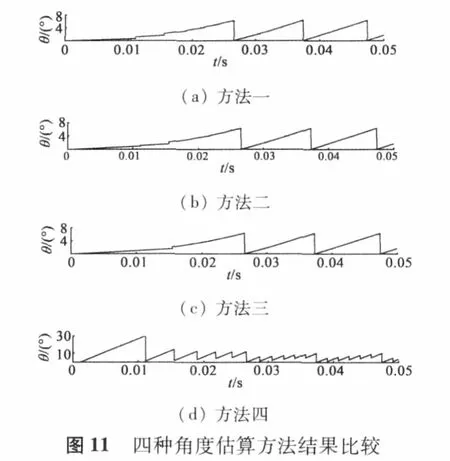
图11是在指令速度为3000 r/min时的四种角度估算方法的波形。从上到下依次为第一种转子角度估算方法到第四种角度估算方法。从图中可以看出随着算法的改进,转子角度估算得到明显改进,角度波形趋于平滑。同时可以看出,第四种角度估算方法在高速时不适用,但在低速时效果不错,如图12所示。图12(a)是通过第四种方法估算得到的转子角度曲线,图12(b)是实际的转子角度曲线。指令转速为60 r/min,从图中可以看出,角度估算曲线快速趋于稳定,电机运转性能稳定。
6 结 语
本文分析了低成本的永磁同步电动机矢量控制系统的组成原理。重点介绍了id=0的永磁同步电动机控制策略,基于开关型霍尔的几种永磁同步电动机转子角度估算方法,并在MATLAB/Simulink环境下搭建了永磁同步电动机矢量控制仿真模型来验证以上方法的可行性。通过运行仿真模型得到了基于以上方法的永磁同步电动机的运行性能。仿真实验结论表明:仿真波形符合理论分析,整个系统运行稳定且具有良好的静、动态性能。可以看出id=0的控制策略有如下特点:
(1)id=0使得β=90°电角度,无去磁效应,定子电流全部用来输出转矩。因此控制简单,性能好、效率高。
(2)当负载增加时,定子电压矢量和定子电流矢量的夹角将增大,永磁同步电动机功率因数降低,逆变器容量的要求也增高。因此适用于小容量的永磁同步电动机控制系统。
几种转子角度估算方法各有优缺点,总体随着算法复杂程度的增加,估算得到的转子角度精度得到增强,但在实际应用中会大大增加控制器的开销。第四种方法最为简单,但它只能用于低转速。在实际的应用中可根据不同的要求做出选择或者综合几种方法以获得最佳效果。
[1]王成元,夏加宽.杨俊友,等.电机现代控制技术[M].北京:机械工业出版社,2006.
[2]Cordne K A,Sudhaff S D.A Hybrid observer for High Performance Brushless DC Motor Drives[C]//IEEE Transactions on Energy conversion,1996,11(2):318 -323.
[3]Bu J,XU L,Sebastan T.Near- zero speed performance enhancement of PM synchronous machines assisted by low cost Hall effect sensors[J].Applied Power Electronics Conference and Exposition,1998,1:64 -68.
[4]曾风平,郑成勇,章跃进.基于开关型霍尔位置传感器的永磁同步电机正弦波驱动[J].微特电机,2010(8):56-58.
[5]房森林,章跃进.基于离散位置信号的永磁同步电动机空间矢量控制[J].微特电机,2010(7):51-53.
[6]董窈窈.采用低分辨率位置传感器的正弦波永磁同步电机控制系统[D].济南:山东大学,2007.
[7]Jia Gui- xi,Zhao Hui- chao,Shao Hong - jun.Simulation research on PMSM vector control system based on SVPWM[C]//2010 International Conference on Electrical and Control Engineering,2010:1936 -1940.
[8]王争光,金建勋,郭有光,等.基于SVPWM的永磁同步电机控制系统模型仿真[C]//Proceedings of the 27th Chinese Control Conference.Kunming,Yunnan,China,2008:724 -728.
[9]高静.直驱式滚筒洗衣机用PMSM驱动系统关键技术研究[D].哈尔滨:哈尔滨工业大学,2010.