推扫式航空遥感器像面调焦机构设计
2012-10-30丁亚林惠守文于春风
陈 伟 ,丁亚林,惠守文,聂 品,于春风
(1.中国科学院 长春光学精密机械与物理研究所,吉林 长春130033;2.中国科学院 研究生院,北京100039)
1 引 言
航空遥感器是获取地面信息的重要手段,它以光学成像的方式给人以直观、清晰的图像信息,具有实时性好、机动性强等特点。按照成像方式,航空遥感器可以分为画幅式、全景式和推扫式[1]。
航空遥感器工作时所处的环境( 大气压力、温度等) 及照相距离等条件的不断变化会导致遥感器光学系统的焦平面位置发生改变。如果CCD 探测器的位置不能随之改变,就会产生离焦。高性能航空遥感器的自动调焦补偿机构,可以校正遥感器变化的像面位置,是保证遥感器成像质量、获得较高分辨率的重要组件之一。因此,调焦机构的设计与研究具有重要的意义。
本文基于一种推扫式CCD 航空遥感器的研制,讨论了遥感器产生离焦的原因,设计出一种内、外曲线凸轮调焦机构,带动CCD 探测器沿光轴方向运动,使CCD 探测器接收面与光学系统的焦平面重合。对传动机构的误差分析和实验验证表明,遥感器照相时CCD 探测器的位置能保持稳定,从而保证航空遥感器获得高清晰度的图像。
2 离焦原因及调焦方式选择
遥感器离焦的主要原因是大气压力和温度的变化以及照相距离的变化。大气压力和温度的变化使空气的折射率发生变化,由此光学系统中透镜的折射率、曲率半径、厚度、透镜之间的间隔均发生变化而导致光学系统后截距发生变化; 遥感器推扫成像时,载机的飞行高度发生变化,物距和像距随之不断变化亦会导致CCD 探测器接收面偏离光学系统焦平面。
航空遥感器工作时,允许的离焦误差不超过遥感器的半倍焦深,计算公式如下:

式中:δ 为半倍焦深,Δ 为焦深,λ 为工作波长,F为镜头相对孔径倒数。
根据式(1) 可计算得到本遥感器的半倍焦深为0.04 mm。
航空航天遥感器光学成像系统的调焦方式有3 种:反射镜调焦、镜组调焦、像面调焦[2-3]。反射镜调焦方式是在镜头后截距内增加一块反射镜改变光路方向,通过移动反射镜改变焦面位置,常用于镜头后截距较长的长焦距相机。镜组调焦方式是通过移动光学镜头的透镜组来达到调焦目的。像面调焦方式是通过移动成像介质( 胶片或CCD) 的感光面完成调焦。中科院长春光机所研制的航天遥感器采用了反射镜调焦方式; 美国CA-295 双波段画幅相机采用了镜组调焦方式[4-6],见图1。
调焦方式的选择受到相机整机结构形式和使用环境条件的限制。CA-295 推扫式相机光学系统为双高斯型折射式系统,配置有3 种不同焦距的镜头。如果选择反射镜调焦方式,会增加反射镜及相应的支撑结构;如果选择透镜组调焦方式,则每种镜头都需要有调焦机构。因此,该遥感器选择像面调焦方式[4-6]。

图1 CA-295 相机组成结构图Fig.1 Schematic diagram of CA-295 camera
3 调焦机构工作原理
装调遥感器时,在常温、常压下使用平行光管标定像平面,模拟物体位于无穷远处。遥感器工作时,其内部安装的温度、压力传感器将环境条件的变化转换为数字量传递给遥感器控制器,同时飞机的惯导系统向遥感器输入飞行高度数据,由此得到照相距离。遥感器控制器根据得到的温度、压力、照相距离决定调焦量的大小,通过电控系统驱动调焦电机工作。使用蜗轮蜗杆减速器及凸轮机构将旋转运动转化为焦平面组件( 包括CCD 探测器) 沿光轴方向的移动,实现离焦补偿。同时,凸轮与编码器相连接,反馈凸轮转动的角度信息,保证调焦的位置精度。
调焦机构主要由蜗轮蜗杆组件、凸轮组件、滚子组件、焦平面组件、直线导轨及编码器等组成,原理如图2 所示。

图2 调焦机构原理图Fig.2 Working principle diagram of focusing structure
蜗轮蜗杆传动用于传递空间交错轴间的动力和运动,主要优点是可以获得较大的单级传动比。凸轮组件是实现调焦电机旋转运动转化为焦平面组件沿光轴方向平稳运动的重要机构,是决定调焦量大小的执行机构。CCD 探测器安装在焦平面组件内,实现与滚子组件的连接。直线导轨通过焦平面组件内的直线轴承保证焦平面组件沿着光轴方向移动,直线导轨与直线轴承之间为间隙配合。
调焦机构不但要求运动准确性,还要求位置稳定性。常用的偏心凸轮形式有内啮合、外啮合等,形式如图3 所示。在内啮合凸轮形式中,滚子r1与凸轮轮廓R1啮合;在外啮合凸轮形式中,滚子r2与凸轮轮廓R2啮合。

图3 常用的偏心凸轮形式Fig.3 Schematic diagram of common offset cam
考虑凸轮的加工工艺及精度要求,提出了一种容易实现高精度、具有形封闭功能的内、外曲线偏心圆凸轮结构[7]。凸轮的运动规律如图4 所示,滚子r1与滚子r2同轴安装;滚子r1与凸轮轮廓R1啮合,滚子r2与凸轮轮廓R2啮合。
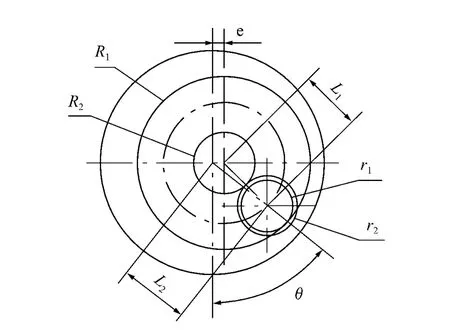
图4 凸轮运动规律Fig.4 Motion principle diagram of cam
由图4 可知:
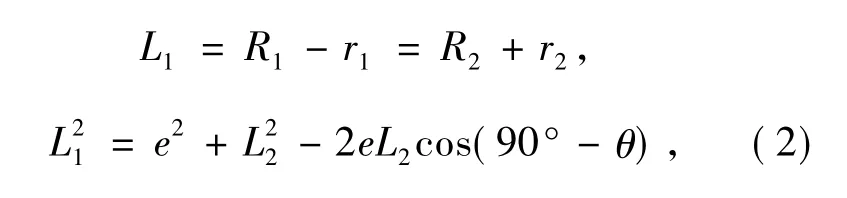
式中:e为凸轮的偏距,L1为滚子中心到凸轮中心的距离,L2为滚子的位移,θ 为滚子的转角。
研究了大气压力、温度和照相距离对成像的影响。环境条件的变化导致像面最大离焦量为1 mm,在保证调焦机构功能的前提下,尽量增大调焦范围,而调焦范围的增大会导致机构的空间尺寸增加。取调焦量为5 mm,L1=13 mm 时,凸轮曲线轴线偏离凸轮轴回转中心2.5 mm,即偏距e=2.5 mm。
将e和L1的数据带入式( 2) ,整理得到凸轮的理论廓线如式(3) :

4 调焦机构精度分析
要得到高分辨率的图像,必须确保CCD 探测器的接收面始终在焦面上。通过分析调焦机构的组成,机构的误差来自两个方面: 一个是传动误差,另一个是焦平面组件相对直线导轨的晃动。根据式(3) 得到传动误差对调焦机构精度影响的计算式(4) :

式中:φ 为传动误差引起的焦平面移动量,θ 为凸轮的理论转角( θ∈[0,2π]) ,β 为传动误差引起的凸轮转角误差。
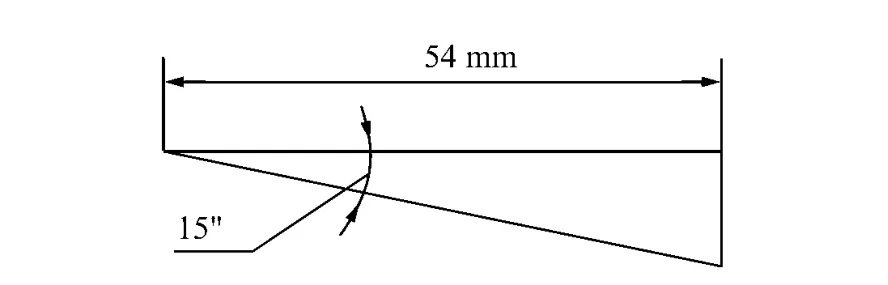
图5 焦平面组件相对直线导轨的晃动Fig.5 Swing value of focal plane assembly
采用光电自准直方法来测量焦平面组件的晃动。如图5 所示,遥感器的焦平面长度为54 mm。在实验室内检测焦平面组件相对直线导轨的晃动为15″。因此,晃动引起的焦平面位置误差最大值为:

5 实验验证
为检验调焦机构精度是否满足要求,在遥感器装调完成后对其进行了测试。
将调焦机构水平放置,电感仪的测头与焦平面组件接触。实验时首先控制调焦电机转动一个角度,以消除启动空回,向调焦电机发出200 个脉冲,此时凸轮顺时针转动,带动焦平面组件向上运动;然后控制调焦电机反转,同样向调焦电机发出200 个脉冲,此时凸轮逆时针转动,带动焦平面组件向下运动。焦平面组件向上和向下运动的位移差值,即为调焦机构引起的误差[8]。
多次测量焦平面组件的位移,获得多组数据,各组间数据变化不大,列举其中6 组如表1 所示。计算得到位移差值的平均值为0.007 5 mm,小于遥感器的半焦深0.04 mm,满足使用要求。

表1 焦平面组件位移Tab.1 Displacement of the focal plane
6 结 论
调焦机构是保证高性能航空遥感器获得较高分辨率的重要组件之一,可对遥感器工作时由于环境条件改变引起的离焦进行补偿。根据光学系统成像的要求,本文在分析离焦原因及对比多种调焦方式的基础上,根据推扫式航空遥感器光学系统的特点和结构形式,设计了一种使用凸轮和直线导轨的调焦机构。设计中采用了偏心的内、外曲线凸轮,将凸轮的旋转运动转化成CCD 探测器的直线运动,实现通过调整像面位置解决离焦的问题,保证了CCD 探测器的位置稳定性。
通过对该调焦机构的传动误差分析和实验验证,表明该调焦机构的误差不大于遥感器的半焦深0.04 mm,满足使用要求。该像面调焦方法可应用于装机空间小、焦距较短的遥感器。
[1] 丁亚林,田海英,王家骐.空间遥感相机调焦机构设计[J].光学 精密工程,2001,9(1) :36-37.DING Y L,TIAN H Y,WANG J Q. Design on the focusing mechanism of space remote-sensing camera[J].Opt. Precision Eng.,2001,9(1) :36-37.( in Chinese)
[2] 安源,齐迎春.空间相机直线调焦机构的设计[J].光学 精密工程,2009,17(3) :609-614.AN Y,QI Y CH. Design of straight-line focusing mechanism for space camera[J].Opt. Precision Eng.,2009,17(3) :609-614.( in Chinese)
[3] 王智,张立平,李朝晖,等.传输型立体测绘相机的调焦机构设计[J].光学 精密工程,2009,17(5) :1051-1056.WANG ZH,ZHANG L P,LI ZH H,et al.. Design of focusing mechanism of space tridimensional mapping camera[J].Opt. Precision Eng.,2009,17(5) :1051-1056.( in Chinese)
[4] PARTYNSHI A J,BERAN S R,BAKER A M,et al.. Dual band framing reconnaissance camera:US,6694094[P],2004-05-05.
[5] ABDULLAH S J,RATNAM M M,SAMAD Z. Error-based autofocus system using image feedback in a liquid-filled diaphragm lens[J].Opt. Eng.,2009,48(12) :123602.
[6] LIEBE C C,POLLOCK R,HANNAH B. System for establishing best focus for the orbiting carbon observatory instrument[J].Opt. Eng.,2009,48(7) :073605.
[7] 秦荣荣.机械原理[M].长春:吉林科学技术出版社,2000.QIN R R.Theory of Machines and Mechanisms[M]. Changchun:Jilin Science and Technology Press,2000.( in Chinese)
[8] 王书新,李景林,刘磊,等.大尺寸焦平面空间相机调焦机构的精度分析[J]. 光学 精密工程,2010,18( 10) :2239-2243.WANG SH X,LI J L,LIU L,et al.. Accuracy analysis of focusing mechanism in space camera with long-focal-plane[J].Opt. Precision Eng.,2010,18(10) :2239-2243.( in Chinese)