新型可变距式救援机器人结构设计及分析
2012-10-16郑书华吴明昊黄叶浩尚伟燕叶川崎
郑书华,吴明昊,黄叶浩,尚伟燕,叶川崎
( 1.宁波工程学院 机械学院,宁波 315016;2.宁波大学 信息科学与工程学院,宁波 315211)
0 引言
近年来全球气候变化莫测,自然灾害频频发生,08年汶川地震、10年玉树地震、11年日本地震引发海啸等,这些自然灾难以及诸多人为灾难均造成人员的重大伤亡和财产的重大损失,因此,在灾害发生之后,如何迅速而有效地展开救援工作就显得尤为重要。执行特殊任务的救援机器人是一种加装各种救援设备、测量仪器和探测系统的智能作业车辆[1,2]。它具有体积小、隐蔽性好、快速反应、机动性好、生存能力强和成本低等特点,并且可以通过远程遥控甚至自主完成部分原本由人完成的任务,能够大大减少复杂工作环境下人员的损耗并提高救援效率[3,4]。因此,适应各种复杂环境的救援机器人的设计显得尤为重要。根据救援区域复杂的结构特点和要求,本文将对可变距救援机器人进行设计。
1 机器人行走机构的方案拟定
面对复杂的救援场地,救援时机器人可能要穿过隧道和桥面等,最后才能进行救援。因此,需要设计气动可变距行走机构。为提高行驶效率,设计轮式救援机器人行走机构,并且通过控制左右轮速度不同实现差速转向,该方案具有结构简单和控制容易的特点[5,6]。
气动可变距装置具体结构如图1所示。气缸固定于左侧板上,气杆固定于右侧板上,左侧板与车体底板固定联接,右侧板与车体底板之间可以存在相对运动。右侧板与车体底板之间的相对位置是靠三根同步平行气杆来保证的。该撑开结构可大大提高变距撑开速度,节省救援时间,经过实车试验,撑开时间可控制在1s之内。该撑开装置结构简单、稳定性好。
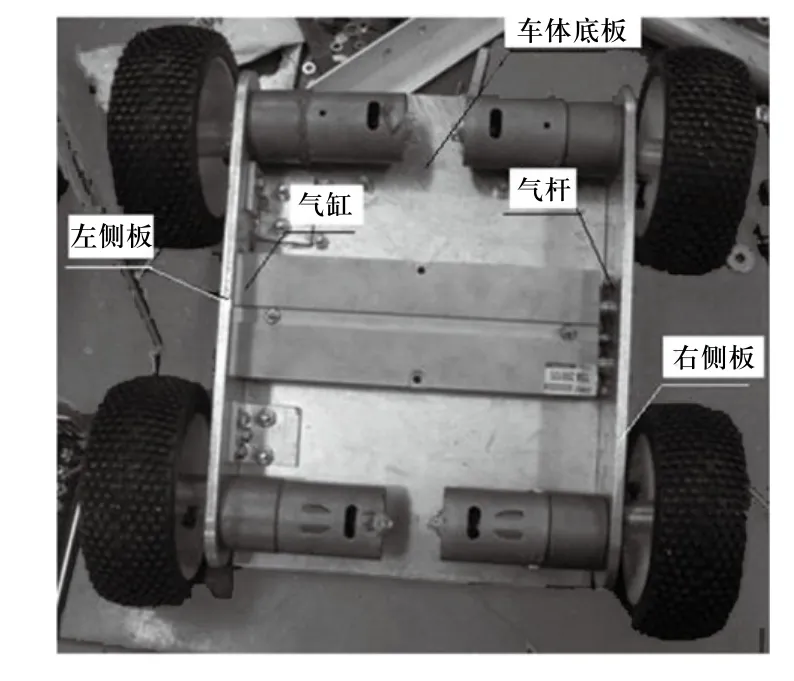
图1 变距撑开装置
行走轮选取橡胶轮,该橡胶轮外圆直径较大,可以增加车子前进速度;轮子与地面之间为弹性接触,不仅增大了轮子与地面之间的附着系数,而且降低了车身振动。四个轮子分别被电机驱动,电机固定安装于左右侧板上,电机输出轴通过联轴器与橡胶轮相连接。该结构形式的行走系统,通过控制左右轮速度不同实现差速转向。
2 救援目标抓取装置的设计
救援目标抓取方式可以有多种分类,包括单爪式抓取装置、一臂多爪式抓取装置、吸盘抓取方式、扫铲式抓取方式等等。各种抓取方式均有一定优点和缺点。
该结构形式的抓取装置包括机械臂和机械手两部分。其中机械手属末端执行器装置。目前,常见的末端执行器有机械式夹持器、吸附式执行器、仿生手等。其中仿生手式末端执行器能模仿动物手部完成一定动作,动作灵活,但是该结构形式的末端执行器由于结构和控制都比较复杂,在该救援任务中不适宜采用。吸附式执行器和机械式夹持器是本设计任务中考虑采用的两种末端执行器。但是吸附式执行器在吸附表面不规则目标时受到局限。因此,设计中考虑采用铲扫式抓取装置。其结构如图2所示。伸缩臂采用气动结构,斜形挡板装于左右气缸上,前挡板固定于气杆上。底部装有网状收集器,可将救援物资收集在车体内,以节省救援时间。该收集装置可顺利实现复杂环境下不规则形状救援物资短时间顺利收集。
车体底板上固定安装支撑轴座1,支撑轴通过轴承支撑于支撑座1上,支撑轴上固定安装大齿轮和支撑座2上固定有两个尼龙套筒,尼龙套筒用来固定气缸。直流电机固定于车体上,通过齿轮带动支撑座2及其上的装置做旋转运动,同时气缸可自由伸缩,从而完成救援目标的抓取。其中斜形挡板底部经过磨削厚度较小,并且经过反复试验,最终确定斜形挡板与地面之间适宜的夹角为38°。该倾斜角的斜形挡板可以减小阻力,确保救援目标顺利收集。
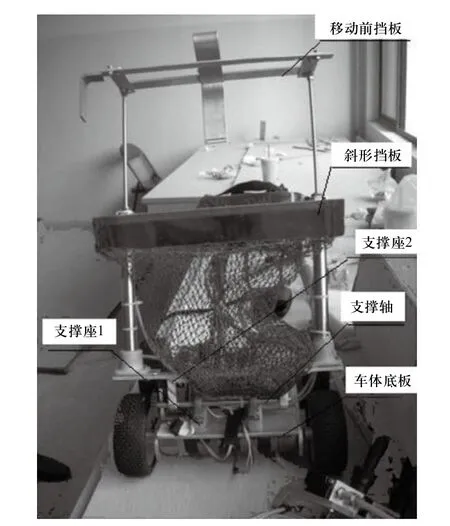
图2 铲扫式收集装置
3 车体参数及气动控制系统设计
本设计主要以节省时间为基本原则,变矩机构的存在,使机器人对地面具有较大的环境适应能力,并且机器人本身体积小、搬运物资效率高,适合各种狭小空间、环境复杂的受灾现场救援。车体主要参数如下表1所示。
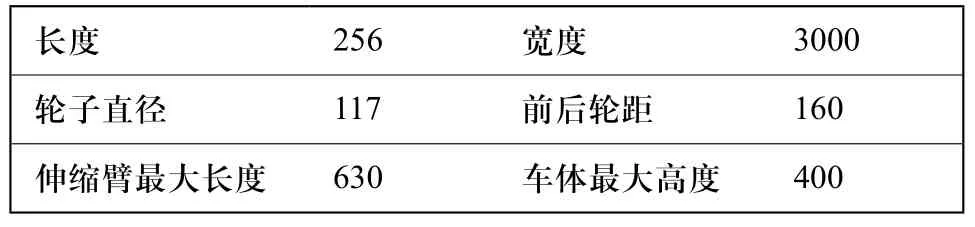
表1 救援机器人总体尺寸 单位(mm)
气动原理图如图3所示。

图3 气动控制系统
左右气缸控制收集装置快速伸缩,换向阀1控制左右气缸同时进退,换向阀2控制机器人左右轮变距撑开与回缩。
4 结束语
本文对可变距救援机器人各部分结构进行了设计。主要完成以下工作。
1)设计出变距结构方案,该变距结构能够使左右轮同步等速撑开,确保救援机器人顺利越过河道支撑桥到达救援区域;设计出四轮式差速行走机构,驱动轮选取橡胶轮,有利于提高机器人行驶稳定性;
2)设计新型气动救援目标抓取装置,并通过试验确定收集装置固定挡板与地面之间的倾斜角度,以实现救援目标的顺利抓取和搬运;
3)进行了总体运动规划及总体结构设计方案,并对主要驱动装置进行选型、对主要零部件进行了设计校核。
本救援机器人经过进一步细化后有望用于灾场救援,可较快实现救援物资的安全转移。
[1]闫清东, 魏丕勇, 马越.小型无人地面武器机动平台发展现状和趋势[J].机器人, 2004, 26(4): 373-379.
[2]陈殿生, 杨喜, 李强.小型地面侦察机器人移动载体技术研究[J].机器人技术与应用, 2006, (6): 43-46, 21.
[3]蔡鹤皋.机器人将是21世纪技术发展的热点[J].中国机械工程, 2000, 11(1-2): 58-60.
[4]Voth D.A new generation of military robot [J].IEEE Intelligent Systems, 2004, 19(4): 2-5.
[5]莫海军, 朱文坚.履带式移动机器人越障稳定性分析[J].机械科学与技术(西安), 2007, 26(1): 65-67, 71.
[6]陈淑艳, 陈文家.履带式移动机器人研究综述[J].机电工程, 2007, 24(12): 109-112.
