高压带电作业机器人系统的研制
2012-10-12赵玉良李运厂
赵玉良,戚 晖,李 健,李运厂
ZHAO Yu-liang1, QI Hui1, LI Jian2, LI Yun-chang2
(1.山东电力研究院,济南 250002;2.山东鲁能智能技术有限公司,济南 250002)
0 引言
为了提高带电作业的自动化水平和安全性,减轻操作人员的劳动强度和强电磁场对操作人员的人身威胁,从80年代起许多国家都先后开展了带电作业机器人的研究,如日本、西班牙、美国、加拿大、法国等国家先后开展了对带电作业机器人的研究。2002年我国也进行了高压带电作业机器人产品化样机的研制。针对目前我国10KV线路带电作业工艺要求,以及作业环境的特点,研制一台能够最大限度的满足现场作业环境要求的高压带电作业机器人,该机器人可以代替人工完成作业频率较高的带电断线、带电接线等作业任务,减轻作业人员的劳动强度,使作业人员与高压电场完全隔离,最大限度的保证作业人员的安全。
1 高压带电作业机器人系统组成
高压带电作业机器人作业时,作业人员在绝缘斗内随机器人升至线路附近,作业人员操控机器人主手遥控操作机器人从手进行作业,机器人主手与从手之间控制信号由光纤进行传递,保证了作业人员与高压电场隔离。
如图1所示,高压带电作业机器人按功能分为四个模块。
1)主从操作机械臂
完成作业任务,将高压电场与作业人员隔离。主从控制精度高、实时性好、持重大、自重小、性能稳定可靠。
2)机器人专用升降系统
采用目前通用绝缘斗臂车改造,活动空间、绝缘等级参照国标与企业标准。将机械臂运送至线路作业位置。
3)工具系统
包括自动剥皮器、遥控电动扳手、自动断线钳、自动破螺母工具等专用工具。以及接引金具、遮蔽工具等。
4)绝缘防护系统
保证操作人员与高压电场完全隔离。同时应保证机器人对地绝缘、防止相间短路。

图1 高压带电作业机器人系统图
2 主从式操作机械臂设计
如图2所示,每个绝缘机械臂均包括液压机械臂本体、机械臂供油装置、液压伺服驱动器、液压伺服驱动器电源、光纤、手持终端、主手、主手控制单元、逆变器和电源。机械臂是一个基于微控制器的、电液设备。机械臂本体采用铝合金和不锈钢制造。机械臂的主手便于左手或右手操作。机械臂本体可以分为上臂和前臂两个基本部分。上臂部分提供腰部回转、大臂俯仰和小臂俯仰的运动。前臂部分提供腕部俯仰、腕部摇摆和腕部旋转的运动。机械臂关节的运动通过7个液压执行器来执行。每个执行器通过一个液压伺服阀来控制。为了减少输油管线和机械臂的复杂度,所有液压伺服阀被集成到机械臂的内部。除了液压伺服阀,还增加了减压阀和电磁阀。电磁阀用来开关液压源。由于增加了减压阀,要求外部油液压力不能超过3000PSI。标准主手是一个结构紧凑,带自平衡模块的设备。主手和从手采用相同的结构。主手和机械臂每个关节都安装一个电位器,用来提供主手和机械臂的位置信息[1]。

图2 主从式机械臂系统设计
3 机器人专用升降系统设计
最大作业高度19m,最大作业幅度14.4m,斗臂车最大推举重量等于1200kg,为10Kv带电作业标准作业车,折叠式加伸缩式。斗臂车可以提供流量30 L/min 以上,压力13.8MPa液压动力,能够满足液压机械臂作业的压力与流量要求。厂家能够进行机器人作业平台与绝缘斗臂车机械联接结构设计、加工和安装,完成整个机器人作业平台钢结构底架玻璃钢外包和机械臂绝缘外包和支撑。改造后绝缘斗臂车外形尺寸,不能超高(4.2m)、超宽(绝缘斗臂车宽度),行走过程中保证平稳安全。高空作业时,机器人作业平台可以实现空中180°旋转,利于三相线路作业。
4 机器人工具系统设计
机器人工具系统是一套创新型机器人工具系统,设计中体现了机器人应用的特点,工具设计标准化、系列化,以保证机器人及其工具设计的实用性。
如图3所示,电动剥皮器主要由直流减速电机、曲柄、连杆、摇杆、棘爪、棘轮和刀头等几部分组成。系统特点如下:直流减速电机驱动曲柄,通过连杆带动摇杆和棘爪一起运动,棘爪拨动棘轮和刀头完成刀具的圆周运动。双弹簧保证棘爪在传动位置/开口位置保持同一姿态;工具轴向进给力由机械臂提供;凸轮机构将压线与压刀动作合二为一,由另一个机械手完成;工具采用无线遥控,嵌入式控制系统、控制工具正反转,加减速;考虑工具瞬时过载,对电源要求较高,采用12V电动扳手电池,电路设计反接、过流保护;工具控制器与遥控电动扳手可互换,工具颜色与电动扳手基本一致,便于今后工具系列化[2]。

图3 电动剥皮器原理图
电动扳手、电动破螺母工具和电动断线钳是高压带电作业机器人重要的专用作业工具,其主要功能是安装、拆卸需要检修的高压带电作业绝缘子及其他接续工具。目前应用的工具多是手动控制,为了适应高压带电作业机器人应用的要求,研制了一套以Atmega128作为主控制器的新型无线控制工具,满足了高压带电作业任务的要求[3]。
5 机器人绝缘防护系统设计
系统对地绝缘,依靠绝缘斗臂车实现,绝缘斗臂车的绝缘臂采用玻璃纤维增强型环氧树脂材料制成,绕制成圆柱形截面结构,具有质量轻、机械强度高、电气绝缘性能好、憎水性强等优点,在带电作业时为人体提供相对地之间绝缘防护;操作人员站在绝缘斗内操控主手作业,操作人员与机械臂之间仅通过光纤通讯,操作人员完全与高压电场隔离;在相-相之间,空气间隙和绝缘平台起主绝缘作用,绝缘遮蔽罩形成相间后备防护,因作业机械臂等电位作业,机械臂外包绝缘材料,形成最后一道防线,防止机械臂偶然触及两相导线造成短路;机械臂绝缘方法:玻璃钢开模具,采用双面玻璃钢模模压成型,内外表面光滑,无毛刺,无气泡,密实程度好;绝缘平台布置如图4所示,主要防止平台作业时接触导线造成相间短路,支架采用钢材,外部采用玻璃钢开模具,边相采用绝缘遮蔽罩遮蔽[4]。
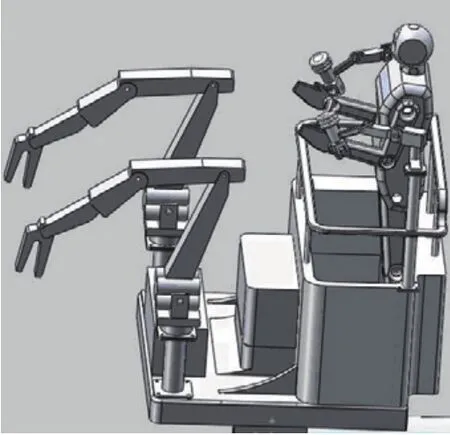
图4 绝缘平台布置图
6 试验
6.1 绝缘机械臂试验

表1 机械臂绝缘试验
1)交流耐压试验
两绝缘机械臂交流耐压试验加压方法如图5所示,一个机械臂末端施加工频交流电压,另外一个机械臂末端接地。施加的交流电压值见表1。机械臂和平台之间的交流耐压试验如图6所示,机械臂末端施加工频交流电压,平台接地。施加的工频交流电压如表1所示。
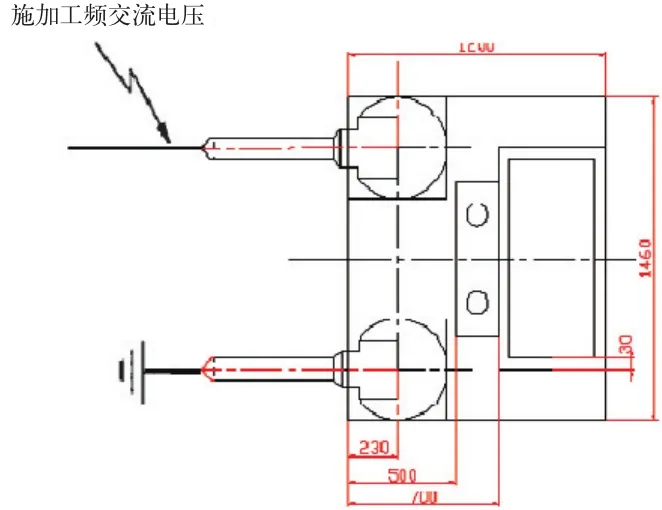
图5 两机械臂交流耐压试验

图6 机械臂和平台间交流耐压试验
2)泄露电流试验
两机械臂在进行交流泄露试验时,其试验电极采用12.7mm的导电胶带设置,施加的工频交流电压值及泄露值见表1,试验方法如图7所示。机械臂和绝缘平台之间进行交流泄露试验时,其试验电极采用12.7mm的导电胶带设置,施加的工频交流电压值及泄露值见表1,试验方法见图8所示。

图7 两机械泄露电流试验

图8 机械臂和平台间泄露电流试验
6.2 绝缘平台试验

表2 绝缘平台外表面绝缘性能
绝缘平台交流耐压试验的加压方法如图9所示。在绝缘平台的上下侧贴锡箔纸,锡箔纸与平台边沿距离h不大于150mm。绝缘平台在进行交流泄露试验时,其试验电极采用12.7mm的导电胶带设置,施加的工频交流电压值、沿面距离h及泄露值见表2,试验方法如图10所示。绝缘平台的表面应平整、光洁、无凹坑、麻面现象、憎水。

图9 绝缘平台耐压试验
7 结论
为了适应10KV配电线路带电作业的要求,研制了一台能够最大限度的满足现场作业环境要求的高压带电作业机器人,进行了交流耐压试验和泄漏电流试验,验证所设计绝缘防护方法的可行性。在交流耐压试验过程中没有击穿、闪络和严重过热现象发生。交流泄露电流试验的泄露电流都小于500μA。整个绝缘防护方法设计合理,防护性能可靠,操作简单方便。工具系统采用无线遥控方式,可以代替人工完成作业频率较高的带电断线、带电接线等作业任务,减轻作业人员的劳动强度,使作业人员与高压电场完全隔离,最大限度的保证作业人员的安全。具有很大的实用价值。

图10 绝缘平台交流耐压试验
[1]孙迪生.机器人控制技术[M].机械工业出版社,1997.
[2]曾国华.可控扭矩电动扳手的设计[J].工具技术,2002.36(5).
[3]李邦协.实用电动工具手册[M].机械工业出版社.2007.
[4]戚晖.高压带电作业机器人绝缘防护技术研究.[J]高电压技术,2003.
