基于卫星无源探测的空间飞行器的轨道估计
2012-10-08董婷婷
董婷婷,杨 慧,吴 祥
(杭州电子科技大学信息与控制研究所,浙江杭州310018)
0 引言
一些国家会发射具有特殊目的的空间飞行器,对他国发射的具有敌意的空间飞行器实施监控并做出快速反应,对于维护国家的安全具有重要的战略意义。可以利用探测器测得目标相对于运动卫星的观测数据,再以观测卫星和空间飞行器的运动模型和观测模型为基础,对空间飞行器的轨道参数进行数学推断[1,2]。由于观测卫星测得的观测数据所依赖的观测坐标系不同于地球上的基础坐标,因此需要按照一定的关系对观测得到的数据进行坐标变换[3]。本文通过仿真观测数据确定空间飞行器的运动轨迹,由于测量数据存在一定的误差,且空间飞行器的轨道模型是非线性的,因此求解其轨迹方程成为解决问题的一个难点,本文采用常微分方程组数值解法和伪逆矩阵求解矩阵方程等方法来求解空间飞行器的轨迹方程[4,5]。
1 运动模型及坐标系的选取
与雷达探测等主动探测技术不同的是,无源探测不具备测距能力,但借助多颗星的同步观测能够进行逐点定位,再结合空间飞行器的运动模型,可以估计轨道参数。
空间飞行器轨道一般可分为3段:靠火箭推进的主升段、在地球外层空间的惯性飞行段和再入大气层后的攻击段。本文重点关注重力斜飞段的后程段,所使用的仿真数据也集中于此段。
本文基础坐标系选取的是随地心平移的坐标系,取地球的中心Oc为原点,并以地球自转轴为Z轴,指向北极为正向,X轴由Oc指向零时刻的0度经线,再按右手法则确定Y轴,建立直角坐标系Oc-XcYcZc。随卫星运动的观测坐标系取Os-XsYsZs,如图1所示,原点取为卫星中心Os,Xs轴沿OcOs连线,离开地球方向为正,Zs轴与Xs垂直指向正北,Ys轴是按右手法则确定。
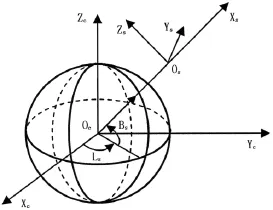
图1 观测坐标系示意图
2 轨道模型及估计理论
由于空间飞行器的轨道估计问题关系着一个国家的安全,很多专家学者对此做了很多探索和研究工作,累积了大量实践经验和仿真实验数据。研究表明可以将飞行器和观测卫星的轨道模型进行简化,再根据观测数据,确定模型的参数,进而估计飞行器的轨道。本文根据相关研究成果,对空间飞行器的轨道模型和相关的估计理论进行探索和分析。
2.1 轨道方程

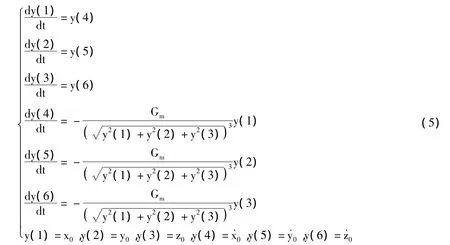
根据变质量质点的动力学,基础坐标系下空间飞行器主动段的简化运动方程如式1所示,向量表示飞行器所受的外力加速度之和表示火箭产生的推力加速度,m(t)为瞬时质量;˙m(t)是质量变化率;→r(t)为空间飞行器在基础坐标系下的位置矢量(t)表示→r(t)对时间t的二阶导数,即加速度;Gm为地球引力常数(本文中取Gm=3.986 005×1014m3/s2),→vr(t)取的是燃料相对于火箭尾部喷口的喷射速度。式1中如果只保留右侧第一项,则可以用它来表示观测卫星的简化运动方程,其形式如式2。
2.2 观测数据

本文所使用的数据来自于专家的仿真实验,数据包括观测卫星在基础坐标系下的坐标和空间飞行器在观测系下的坐标。其中空间飞行器的仿真观测数据可以由观测坐标系下的两个无量纲比值确定如式3所示,xs,ys,zs为空间飞行器在观测坐标系中的坐标。
2.3 估计理论
由于基于红外线等的无源探测技术只能辨别目标的方向,而无法确定其距离,因此估计的关键是设法转换观测坐标系下的两个无量纲比值,使得距离信息变得可达,采用对双星甚至是多星的观测数据进行逐点交汇的方法来获取目标的位置信息。本文的估计使用数值解法求解微分方程组,并利用工程中常用到的伪逆矩阵求解方程。
3 卫星轨道模型的建立与求解


4 空间飞行器轨道模型
4.1 旋转矩阵
空间飞行器某时刻的基础坐标系坐标是未知的,必须将其从观测坐标系转化到惯性坐标系,再从惯性系平移到基础坐标系下。将基础系平移使其原点与观测系重合,则此时的基础系就变成了上述的惯性系,如图3所示。
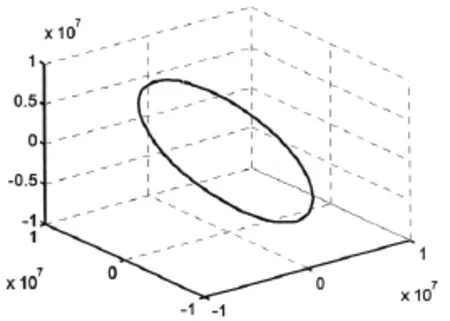
图2 观测卫星运动轨迹

图3 坐标系相对关系示意图

Bs为高低角,描述点Os与平面OcXcYc之间的夹角;Ls为方位角,描述Os在平面OcXcYc上的投影与Xc轴间的夹角。惯性坐标系与观测坐标系的关系,可以表示为如式6所示,式中惯性坐标系到观测坐标系的旋转矩阵C,其可以表示为如式7所示。
4.2 空间飞行器轨道估计
根据观观测卫星的运动轨迹的数值解,用插值法可以求解得到1号观测卫星和2号观测卫星在任意时刻下的三维位置坐标,和相对应情况下的高低角Bs和方位角Ls。之后再根据式3,利用逐点交汇的方法,将1号观测卫星和2号观测卫星对空间飞行器的仿真观测数据转化为三维位置坐标,实现空间飞行器的定位,最后再利用旋转矩阵按照先旋转再平移的方法将其转化为基础坐标系下的坐标,化简方程组并对方程组求解,最后得到空间飞行器的轨道曲线如图4所示。
4.3 结果分析

图4 空间飞行器的轨道曲线
本文在卫星无源探测技术的观测数据下实现了空间飞行器的轨道估计,这对于无源探测技术的发展具有一定的现实意义。在对估计结果的分析中发现,使用不同的观测卫星数据所得到的结果存在一定的偏差。但是与有源探测技术的探测区域受限制相比,基于卫星的无源探测技术的应用范围则有了更大的扩充,因此在无源探测基础上对空间飞行器的轨道估计所具备的优势也就显而易见。而随着无源探测技术的发展,我们要不断地对估计理论及方法进行探讨,以进一步提高估计的精度。
4.4 误差分析
由于所研究的问题在观测数据下无解析解,本文中使用了伪逆矩阵求解矩阵方程组,这是在无解情况下求得的最优近似解,因此估计不可避免的存在一定的误差,且误差的大小与观测数据的精度有关。当无源探测技术的精度有了进一步的提高时,按照本文所使用的估计理论对空间飞行器的估计精度也将会有更大的提高。
5 结束语
本文研究的是基于卫星无源探测的空间飞行器的轨道估计问题,采用逐点交汇的方法来实现空间飞行器的轨道轨迹的估计。不同空间飞行器的本质差异就在于→vr(t)和m(t)的模型不同,m(t)一般而言应为严格单调递减的非负函数。→vr(t)的方向一般应与飞行器的速度方向接近或相同,其大小一般较为稳定。随着卫星无源探测技术的发展,进一步的研究将会根据现有的一些技术参数,例如燃料的喷射速度等,进一步使用数值解法来实现空间飞行器的轨道估计。
[1]王志刚,施志佳.远程火箭与卫星轨道力学基础[M].西安:西北工业大学出版社,2006:10-20.
[2]张毅,肖龙旭,王顺宏.弹道导弹弹道学[M].长沙:国防科技大学出版社,2005:99-131.
[3]李兴龙,姚郁,杨宝庆.空间飞行器环绕进入绕飞轨道策略研究[J].现代防御技术,2011,39(6):20-25.
[4]赵静,但琦.数学建模与数学实验[M].北京:高等教育出版社,2008:125-150.
[5]隆昌菊.伪逆矩阵与线性方程组[J].重庆职业技术学院学报,2006,15(6):158-159.
