基于PLC的立体仓库控制系统的设计
2012-09-19高殿明辛艳东
高殿明,辛艳东
(1.哈尔滨哈电机械电子设备有限责任公司哈尔滨150040;2.哈尔滨电机厂有限责任公司哈尔滨150040)
立体仓库一般是指采用几层、十几层乃至几十层高的货架储存单元货物,用相应的物料搬运设备进行货物入库和出库作业的仓库。由于这类仓库能充分利用空间储存货物,故常形象地将其称为“立体仓库”。立体仓库的产生和发展是第二次世界大战之后生产和技术发展的结果。50年代初,美国出现了采用桥式堆垛起重机的立体仓库;50年代末60年代初出现了司机操作的巷道式堆垛起重机立体仓库;1963年美国率先在高架仓库中采用计算机控制技术,建立了第一座计算机控制的立体仓库。此后,自动化立体仓库在美国和欧洲得到迅速发展,并形成了专门的学科。60年代中期,日本开始兴建立体仓库,并且发展速度越来越快,成为当今世界上拥有自动化立体仓库最多的国家之一。
我国对立体仓库及其物料搬运设备的研制开始并不晚,1963年研制成第一台桥式堆垛起重机(机械部北京起重运输机械研究所),1973年开始研制我国第一座由计算机控制的自动化立体仓库(高15 m,机械部起重所负责),该库1980年投入运行。到目前为止,我国自动化立体仓库数量已超过200座。立体仓库由于具有很高的空间利用率、很强的入出库能力、采用计算机进行控制管理而利于企业实施现代化管理等特点,已成为企业物流和生产管理不可缺少的仓储技术,越来越受到企业的重视。
1 立体仓库的结构和工作原理
1.1 自动化立体仓库的概述
自动化立体仓库是指在不直接进行人工处理的情况下,自动地完成物品仓储和取出的系统,它以高层立体货架为主体,以成套搬运设备为基础,是集自动控制技术、通信技术及机电技术于一体的高效率、大容量存储机构。自动化立体仓库的出现,实现了仓库功能从单纯保管型向综合流通型的转变。用PLC控制的自动化立体仓库达到仓储技术的全面自动化。
自动化立体库基本由以下部分组成:高层货架:用于存储货物的钢结构。目前主要有焊接式货架和组合式货架两种基本形式。托盘(货箱):用于承载货物的器具,亦称工位器具。
巷道堆垛机:用于自动存取货物的设备。按结构形式分为单立柱和双立柱两种基本形式;按服务方式分为直道、弯道和转移车三种基本形式。
输送机系统:立体库的主要外围设备,负责将货物运送到堆垛机或从堆垛机将货物移走。输送机种类非常多,常见的有辊道输送机、链条输送机、升降台、分配车、提升机机和皮带机等。
AGV系统:即自动导向小车。根据其导向方式分为感应式导向小车和激光导向小车。
自动控制系统:驱动自动化立体库系统各设备的自动控制系统。目前以采用现场总线方式为控制模式为主。
库存信息管理系统:亦称中央计算机管理系统。是全自动化立体库系统的核心。目前典型的自动化立体库系统均采用大型的数据库系统(如ORACLE,SYBASE等)构筑典型的客户机/服务器体系,可以与其他系统(如ERP系统等)联网或集成。
1.2 立体仓库的结构和功能
根据某一物流公司对立体仓库的具体要求,本文所设计的立体仓库具有以下功能。结构图如图1所示。
(1)堆垛机(机械手)要有三个自由度,即:前进、后退;上、下;左、右。
(2)堆垛机的运动由步进电机驱动。
(3)堆垛机前进(或后退)运动和上(或下)运动可同时进行。
(4)堆垛机前进、后退和上、下运动时必须有超限位保护。
(5)每个仓位必须有检测装置(微动开关),当操作有误时发出错误报警信号。
(6)当按完仓位号后,没按入或取前,可以按取消键进行取消该操作。
(7)整个电气控制系统必须设置急停按钮,以防发生意外。
2 系统控制方案
2.1 立体仓库技术参数的确定
立体仓库技术参数见表1。
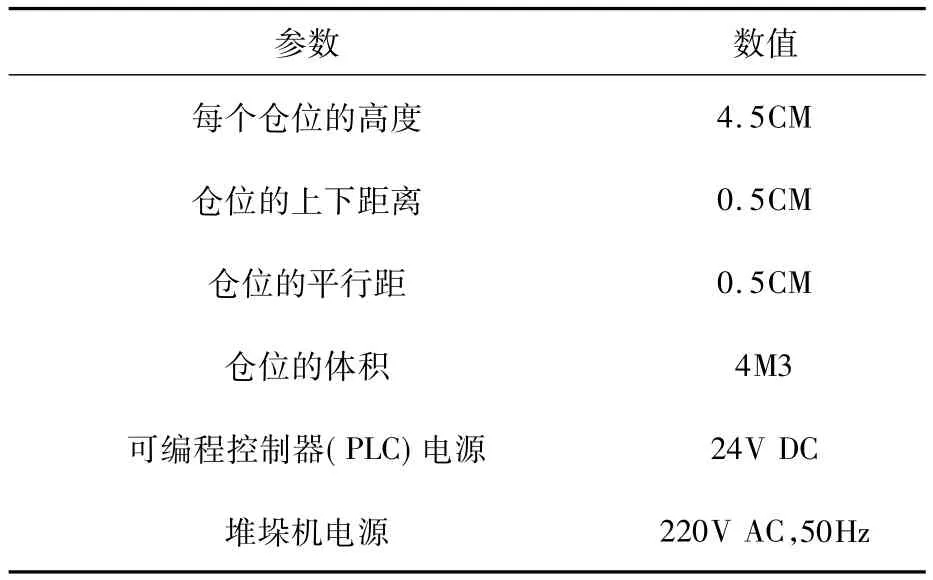
表1 立体仓库具体参数
2.2 PLC 的选型
在PLC系统设计时,首先应确定控制方案,下一步工作就是PLC工程设计选型。工艺流程的特点和应用要求是设计选型的主要依据。因此,工程设计选型和估算时,应详细分析工艺过程的特点、控制要求,明确控制任务和范围确定所需的操作和动作,然后根据控制要求,估算输入输出点数、所需存储器容量、确定PLC的功能和外部设备特性等,最后选择有较高性能价格比的PLC和设计相应的控制系统。
FX2系列可编程控制器主机分为16、24、32、64、80和128点六档,还有各种输入和输出扩展单元,这样在增加I/O点数时,不必改变机型,可以通过扩展模块实现,降低了经济投入。本课题设计的立体仓库控制系统有输入信号40个,输出信号21个。其中,外部输入元件包括:检测元件、按钮、取、送、急停、限位开关和超限位保护等;输出有三个步进电机的正反向、动作指示、错误显示等。按照上述配置,所选I/O点不得低于61点,结合实际情况,所选I/O点为80点。因此我所选型号为FX2N-80MR。
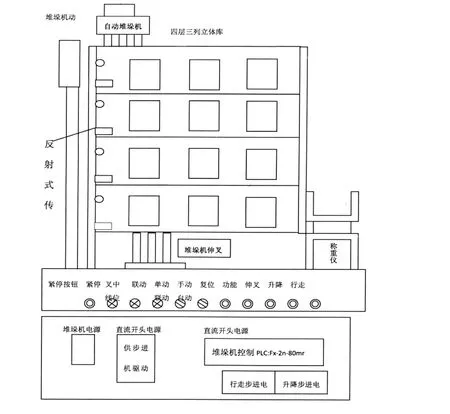
图1 立体仓库结构示意图
2.3 步进电机驱动器的选择
采用SH系列步进电动机驱动器,型号为SH-2H057。主要由电源输入部分、信号输入部分、输出部分组成。SH-2H057步进电动机驱动器采用铸铝结构,此种结构主要用于小功率驱动器,这种结构为封闭的超小型结构,本身不带风机,其外壳即为散热体,所以使用时要将其固定在较厚、较大的金属板上或较厚的机柜内,接触面之间要涂上导热硅脂,在其旁边加一个风机也是一种较好的散热办法。
2.4 传感器的选择
在该立体仓库中采用欧姆龙EE-SPY402凹槽型、反射型接插件式传感器作货物检测,它是日本欧姆龙公司的产品,采用能抗周围外来光干扰的变调光式;采用变调光式,与直流光式比,不易受外来光干扰的影响;电源电压为DC5-24V的大量程电压输出型;带有容易调整的光轴标识;带有便于调整,动作确认的入光显示灯。
2.5 系统流程图
根据系统工作过程的分析得出,示意图如图2所示。
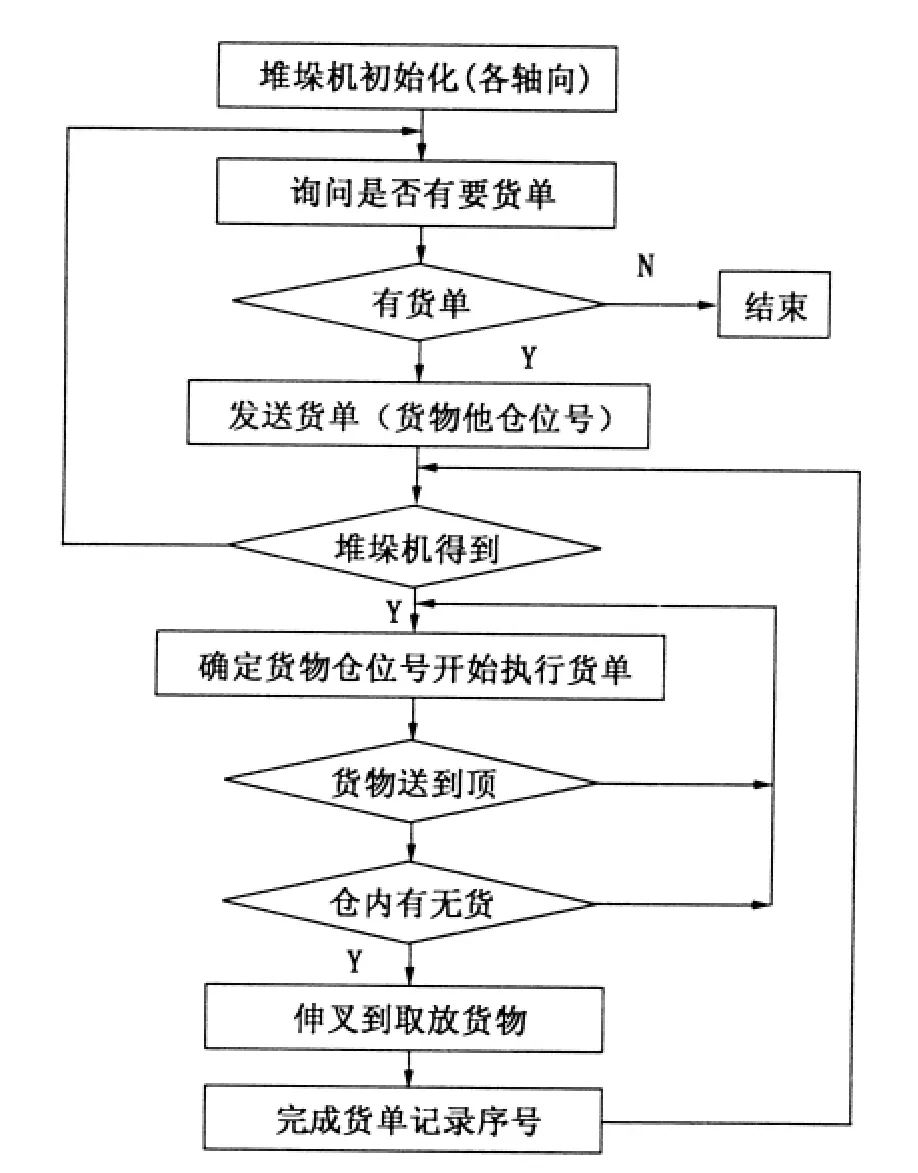
图2 系统流程图
3 结束语
文中主要以PLC为核心,利用PLC的强大的控制功能,实现了利用可编程控制器控制立体仓库的功能,具有接线简单、编程直观和扩展容易等特点。当机械手的功能增加时,硬件接线上只需增加行程开关输入信号。原来的接线不需改变,软件上只需增加相应程序以及输出的功能,要改动的地方也较少。调试结果表明,在适应性、精确性和可靠性方面,到达到了设计的要求,表明该设计方案是可行的。
[1] 汤自春.PLC原理及应用技术[M].北京:高等教育出版社,2006.
[2] 吴明亮、蔡夕忠.可编程控制器实训教程[M].北京:化学工业出版社,2005.
[3] 贾德胜.PLC应用开发实用自程序[M].北京:人民邮电出版社,2006.
[4] 周伯英.工业机器人设计[M].北京:机械工业出版社,1995.
[5] 薛伟,单文斯.基于GE矩阵1T行业CRM客户分类方法的研究[J].森林工程,2008,24(4):93-96.
[6] 盖志武,孙震,杨学春.臭氧防治病虫害装置及其控制系统设计[J].森林工程,2009,25(5):40-43.
