混凝土泵车臂架振动响应的主动控制实验研究
2012-09-17吴斌兴王佳茜
黄 毅,吴斌兴,王佳茜
(中联重科股份有限公司,长沙 410013)
混凝土泵车是一种用于输送和浇注混凝土的专用机械,可以将混凝土沿管道连续输送到浇注现场,逐步成为建筑施工中不可缺少的关键设备。目前市场常用泵车臂架一般由4臂节至6臂节组成,工作时臂架部分伸展较大,在力学上属悬臂梁结构,受力比较复杂。泵车臂架的振动是影响混凝土泵车整车性能和施工质量的重要因素,振动过大会造成泵车臂架末端软管无法精确定位,同时产生的动应力直接影响泵车的疲劳寿命。随着高压、大排量泵送和超长臂架技术的发展,臂架振动问题将越发严重,如何有效抑制泵车臂架振动的需求将更加迫切。
振动主动控制[1]是在振动过程中根据受控对象的振动状况进行实时的外加控制,使振动满足系统的预定要求。由于控制力由外部输入能量来改变,因而其具有良好的可控性,是一种积极有效的减振控制策略。虽然振动主动控制技术在航空航天[2],土木建筑[3]、车辆工程[4]、机械工程[5]等领域有较深入的发展,但由于振动主动控制技术的复杂性,导致在工程机械领域对其的研究还没得到较深入的研究与应用。开展混凝土泵车臂架振动响应主动控制研究,达到工程中对振动的控制要求,具有重要的理论和实际意义。
本文以中联重科某型号长臂架混凝土泵车为研究对象,建立泵车臂架系统的动力学模型,采用模态滤波技术和最优控制理论设计主动电液控制策略,通过控制优选臂节油缸的作动以实现对臂架振动响应的实时控制。实验结果表明,采用该主动减振控制后水平工况下臂架末端的减振精度可达80%,取得了显著的减振实验效果。
1 主动控制策略
由结构模态理论可知,复杂机械系统在时域内的振动可用其低阶自由度系统在模态空间内的振动足够近似地描述,故对其振动控制可转化为在模态空间内少数几个模态的振动控制。独立模态空间控制法可实现对所需模态的独立控制,而不影响其它未控模态,具有易设计的优点。
独立模态空间控制原理框图如图1所示。M、K、C分别表示混凝土泵车臂架系统的质量矩阵、刚度矩阵和阻尼矩阵,Fexi为臂架系统所受混凝土泵送激励力,为系统加速度响应,为系统第i阶模态位移、模态速度和模态加速度,Φi和φi为第i阶模态滤波器向量和振型向量,gi、hi为模态控制力增益,Vi为由模态控制力fi到实际控制力Fctrl的变换矩阵。
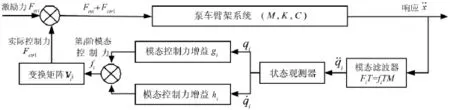
图1 控制原理框图Fig.1 Principle diagram of controlling system
根据模态叠加原理,系统的振动响应可由n阶主模态响应的叠加来近似表达。故作下式变换:

为了实现臂架系统的独立模态空间主动控制,需要同时知道振动系统的模态位移和模态速度,但工程中通常测量的振动量为加速度信号。由文献[6] 可知,通过引入模态滤波器M,可从物理加速度求得模态加速度,然后通过设计的状态观测器,实现从模态加速度响应到模态速度响应和模态位移响应qi的转换。
对于要控制的第i阶模态,对应的模态控制力为:

模态控制力增益系数gi和hi通常由极点配置法来确定,若要求第i阶模态极点配置在λi=αi±βij处,则可从闭环特征方程求得:

其中ωi为系统第i阶固有频率。
对独立模态空间控制算法来说,振动系统的各阶模态都是相互独立的,所以可以得到实际控制力为:

2 臂架振动主动控制实验
本文研究对象为某型号混凝土泵车的臂架,该泵车臂架主要结构如图2所示,分别包括转台、末端软管、第一臂节至第五臂节、第一臂节油缸至第五臂节油缸、混凝土输送管道。混凝土由砼缸通过连接机构交替推入混凝土输送管道,管道固定在臂架侧面,将混凝土输送到预定的目标位置。
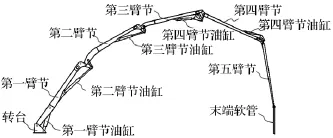
图2 臂架结构简图Fig.2 Structure diagram of boom system
工作状态下的泵车臂架各臂节之间的夹角可根据目标施工位置任意调整,理论上泵车姿态有无穷多种。但从实际工程应用中发现,臂架伸展程度越大,臂架末端振动越严重,因此本文仅以泵车臂架伸展程度最大的水平姿态为例进行研究。当然,该主动控制方法可以很容易推广至其它任意姿态。本混凝土泵车臂架的主要结构参数和臂节油缸参数分别如表1、表2所示。
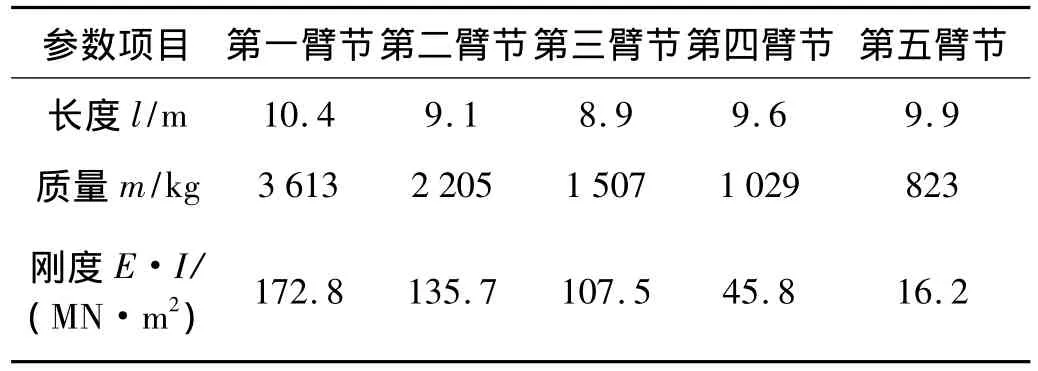
表1 臂架结构参数Tab.1 Structure parameters of booms

表2 臂节油缸参数Tab.2 Structure parameters of oil- cylinders
通过泵送混凝土工况下泵车工作模态试验及分析得到臂架系统的模态参数如表3所示。考虑泵车实际工作状态下臂架振动以一阶振动为主的特点,本文主要研究抑制泵车臂架振动的一阶模态,而不考虑去抑制其它模态。

表3 水平姿态下臂架系统模态参数Tab.3 Modal Parameters of boom system in horizontal position
由振动理论可知,系统第1阶模态极点参数α1=- ξ1ω1,β1= ω1,考虑一阶被控模态阻尼比的实际情况,取 α1= -0.45 ×2 ××0.33= -0.93,β1=2××0.33×
[7]的方法建立混凝土泵车臂架柔性多体动力学模型,在水平姿态下该臂架的主动减振控制系统如图3所示。本主动减振系统由受控臂架对象、信号采集单元、振动控制单元和信号调理单元组成。在控制过程中,控制器应根据控制规律实时快速地对反馈振动进行响应,为保证控制的实时性要求,控制系统选用LabVIEW RT实时模块和PCI-7041嵌入式控制器来构建振动控制实验平台,控制算法采用Lab-VIEW语言来实现。由于只考虑臂架末端在XOY平面内的振动,故约束臂架模型的节点1、2在该平面内的所有自由度,计算可知该系统共有50个自由度。根据传感器位置优化配置的分析结果,将2个PCB加速度传感器分别配置于节点27Y、15Y。由臂架的动力学模型仿真分析结果,在该臂架系统中选择第二臂节油缸(节点4、节点7之间)和第三臂节油缸(节点10、节点12之间)为控制作动器。信号采集单元实时采集2个PCB加速度信号,并将其进行放大、滤波处理后输出至振动控制单元,振动控制单元对反馈信号进行模态滤波和控制力的计算,换算为作动臂节油缸的控制量,输出至信号调理单元,信号调理单元对作动臂节油缸控制量进行功率放大等处理后,最终输出至泵车作动臂节油缸电磁阀,通过作动臂节油缸产生的伸长或收缩运动,实现对泵车末臂节振动的有效控制。
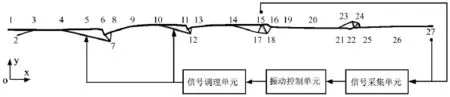
图3 主动减振控制示意图Fig.3 Diagram of active vibration control
3 实验结果分析
如图4所示,主动减振实验对象选择中联重科某型号长臂架混凝土泵车,由混凝土泵送试验台提供混凝土料,通过泵送混凝土产生的冲击力给水平姿态下泵车臂架施加激励。实验过程中泵车排量为100%,发动机转速为1 750 r/min,砼缸的泵送频率为0.32 Hz。激励频率处于水平姿态下臂架的一阶固有频率0.33 Hz的共振范围内,导致臂架末端产生较大的共振。由振动理论可知,共振频率下的振动控制最能说明该主动减振系统的有效性。图5为臂架末端位移的时间历程,包括三个阶段:① 最初不施加主动减振控制,臂架在泵送混凝土的冲击作用下产生较大的振动,振动峰峰值达到650 mm;② 从18秒至93 s开启臂架主动减振控制,振动峰峰值很快稳定在100 mm左右;③ 93 s以后再次关闭主动减振控制,振动峰峰值又恢复到650 mm左右。从泵车臂架末端振动位移曲线可以看出,水平姿态臂架的一阶模态振动得到较好的独立控制,开启主动减振控制后混凝土泵车臂架振动收敛可以达到80%。试验结果说明本文的独立模态振动控制策略对混凝土泵车臂架结构动力响应的控制效果是比较理想的。

图4 试验现场Fig.4 Experiment of active vibration control
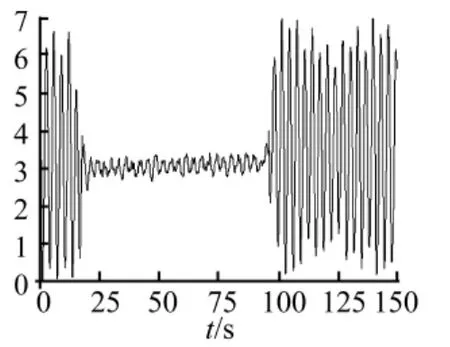
图5 减振效果时间历程图Fig.5 Time histroy of controlled vibration
4 结论
本文采用独立模态空间控制方法对泵送状态下的混凝土泵车臂架结构响应进行了主动控制试验研究。信号采集单元实时反馈混凝土泵车臂架的加速度传感器信号,通过采用模态滤波技术和最优控制理论设计主动控制策略的振动控制单元,获取臂架系统的模态位移和模态速度响应,计算得到模态控制力和臂节油缸控制力,最后通过信号调理单元处理后输出至泵车臂节油缸,通过作动臂节油缸产生的伸长或收缩运动,对臂架施加作动控制,以实现对泵车末臂节振动响应的有效控制。试验结果表明,理想工况下臂架末端的减振精度可达80%以上,因而在实现混凝土泵车臂架结构响应的主动控制方面具有很好的实用性。
参考文献
[1] 顾仲权.振动主动控制[M] .北京:国防工业出版社,1997.
[2] 侯砚泽,王 青,李 广,等.机翼颤振的鲁棒自适应切换控制[J] .航空学报,2010,31(2):327.
[3] Kori JG,Jangid R S.Semiactive control of seismically isolated bridges[J] .International Journal of Structural Stability and Dynamics,2008,8(4):547 -568.
[4] Alexis Scotto dpApollonia,Stephane Contini.Large eddy simulation of a semi realistic vehicle shape under crosswind conditions[C] .EACC 2007 3rd European Automotive CFD Conference,2007:11-24.
[5] Burrows C R,et al.Active vibration control of flexible rotors:an experimental and theoretical study.In:Proc.R.Soc.London,A422,2005.123-146.
[6] 卢连成,吴 琼.智能空间桁架结构独立模态控制方法[J] .振动工程学报,1997,10(4):480-485.
[7] 刘 杰,戴 丽,赵丽娟,等.混凝土泵车臂架柔性多体动力学建模与仿真[J] .机械工程学报,2007,43(11):131-135.
