激光隧道表面测量仪的研制
2012-09-08李德信胡朝旭
李德信 胡朝旭
西安理工大学,西安,710048
0 引言
隧道表面尺寸、形状的测量是隧道工程施工及检测经常进行的工作。传统的人工表面测量方式是在隧道中确定一个基点后,用手工方式测量此基点与表面若干被测点之间的距离,再对测量数据进行后处理。在这种测量方式中,整个测量过程均由操作者手工操作完成,劳动强度大,测量周期长,且由于操作人员技术水平高低不同,会造成不同程度的测量误差[1]。
数字化的表面形状测量常常借助于各种测距元件进行,常见的测距元件有红外线测距元件、雷达测距元件和激光测距元件等。数字化的测量方式具有精度高、效率高、劳动强度低等特点,以上几种测距元件中,使用最广、测量精度比较高的是激光测距元件[2]。借助测距元件进行测量时所依据的原理与手工用尺子测量的方式基本一致,只是确定基点与表面若干被测点之间距离的方式用测距元件来完成,对测量数据的后处理,诸如计算和绘图等,通过电脑完成[1]。
传统的隧道断面激光测量仪在使用时,固定好仪器后,激光测距元件只能绕一个轴转动,仅能测量该表面上的一条曲线,不能自动连续测量整个表面。若需要测量整个表面,便需要移动仪器,重新定位进行测量,然后综合几次测量的结果,才可生成表面形状,这样便使测量变得繁琐,且重新定位会影响测量精度。本文所设计的隧道表面激光测量仪,在一次固定后,激光测距元件可同时绕两个相互垂直的轴转动,实现对某个表面的自动连续测量,同时,该仪器还具有扫描测量物体外形的功能。
1 激光隧道表面测量仪系统的原理
激光隧道表面测量仪工作时,测距元件依靠激光测量距离。测距元件在工作时向目标射出一束激光,由光电元件接收目标反射的激光束,计时器测定激光束从发射到返回被接收的时间,经过计算得出所测距离[3-4]。
测量隧道表面时,有两个特点:一是表面顶部的位置较高,人员不易触及;二是需要逐点测距,数据量大。对测距仪的基本要求是:①无合作目标测距功能(即不需棱镜或其他反射物体来反射测距光束);②测距速度快,一般1~2s就能测距一次;③测距仪有标准数据输出接口,如RS232或USB接口,以方便与计算机等设备连接;④测距仪误差应能控制在一定范围之内,一般是±5mm;⑤测距头体积和重量应较小,便于移动、系统集成和操作[5]。本文中所采用的激光测距元件DISTO OEM module3.0WH30可以满足上述要求。
1.1 激光隧道表面测量仪的测量原理
如何控制激光测距元件发出的激光在隧道表面上自动连续扫描测量曲面轮廓,是本文所设计的仪器的关键所在。图1所示的断面测量仪只能绕一个轴转动,在工作时,一次安装仅能测量一条曲线(一个断面),不能连续测量曲面,若要实现对曲面的测量,需移动仪器,重新定位测量,这样就增加了测量工作量,降低了测试效率,且重新定位后,测量精度会受到影响。要使仪器在工作时能实现对曲面的自动连续扫描测量,需要使仪器的机械运动部件满足以下要求:①测距仪具有两个旋转自由度,即可以分别绕两个坐标轴旋转;②激光测距元件测量一个点大约需1~2s,因此,每转过一定角度,需等待激光测距元件测量完成后,方可转向下一角度测量,需要控制步进电机的启停和旋转速度。综合以上两点,本文设计的测量仪机械运动部分原理图如图2所示。

图1 激光隧道表面测量仪的测量原理

图2 机械运动部分原理图
图2中,激光测距元件与安装在上箱座中的步进电机2连接在一起,在步进电机2的带动下,激光测距元件可以绕X轴旋转;上箱座又与安装在底座中的步进电机1连接在一起,这样,在步进电机1的带动下,激光测距元件与步进电机2可以同时绕Y轴转动。由此本文设计的测量仪实现了激光测距元件在两个自由度下的运动,可以实现对曲面的自动连续测量。测量仪工作时,两个方向的转动由控制系统控制,并记录下转动信息。
1.2 激光隧道表面测量仪系统的控制原理
图2所示的机械部分在工作时,激光测距元件绕X轴旋转一周后(或按照用户需要测完某个范围),即可完成一个断面的测量,然后,上箱体在步进电机1的带动下旋转一个角度,激光测距元件再次绕X轴旋转便可以对下一个断面进行测量。
在测量过程中,测量得到的数据需及时显示出来,以方便操作者及时掌控。因此,显示器是必不可少的,且显示器具有实时监测测量进程以及显示测量后生成的表面图形的作用。
在测量完成后,数据除了可以立刻被CPU处理生成表面形状图以外,还可以将数据储存下来,以方便对数据做进一步的处理和后续使用,因此,数据存储也是该系统必备的部分。为了使用方便,设计了打印机来打印测量数据。
数据可能会需要后续处理,单靠仪器的CPU可能无法完成。因此,仪器需要与PC机之间保持通信关系,能在测量的同时将数据送入PC中进行处理和保存。
综合以上分析,图3为所设计的测量仪的系统控制原理图。该系统可根据操作者的控制指令,控制两个步进电机运动,同时向激光测距元件发送测量命令,测量结果返回CPU后,进行数据的处理,显示器显示测量进程和数据处理结果,打印机可将数据打印出来,便于保存。

图3 系统控制原理图
2 硬件结构
2.1 CPU的选择
CPU需控制激光测距元件、步进电机和实现对数据的简单处理,更复杂的处理可以通过功能更强的PC机来实现。考虑仪器控制相对比较简单和成本问题,CPU采用单片机即可实现所需控制功能,本文选用STC89C516单片机作为CPU,它具有63KB的Flash程序存储器和1280B的RAM数据存储器,可以满足程序及数据存储的需要,且不需外接存储器,其价格相对较低[6]。
2.2 PC机、激光测距元件的连接
激光测距元件DISTO OEM module3.0 WH30,采用RS232串口来接收测量命令并返回测量结果。单片机的串行接口通过MAX232转换电平后,与激光测距元件的RS232串口连接,便可向激光测距元件发送测量指令并接收测量结果。
单片机的串行接口通过MAX232转换电平后也可与PC机进行通信。但单片机只有一个串口,为了能同时连接激光测距元件和PC机,需对单片机串口进行扩展,以实现单片机与PC机和激光测距元件通信。
2.3 步进电机的连接
步进电机的控制采用步进电机驱动器来实现,单片机需向步进电机驱动器发送走步和方向脉冲,实现对步进电机走步和方向的控制。单片机的P1.0、P1.1和P1.2、P1.3分别接两个步进电机驱动器的走步和方向脉冲输入端。其中,接步进电机1驱动器的P1.0为正反转控制端,P1.1为走步控制端;接步进电机2驱动器的P1.2为正反转控制端,P1.3为走步控制端。通过以上连接,步进电机便可以按照单片机发出的控制信号运动,实现对激光测距元件转向和速度的控制。
2.4 键盘、显示、打印和存储
由于单片的I/O口有限,若同时连接VGA显示器、打印机和键盘会出现I/O口不够用的情况,因此,需对单片的I/O口进行扩展,将P0口通过扩展后分别连接键盘、VGA显示器和打印机。
键盘是用户控制该仪器的设备,键盘需对激光测距元件、步进电机、打印机等的工作过程进行控制,这里采用单片机系统常用的4×4矩阵式键盘,共16个按键。
VGA显示器可以显示彩色图形和文字,在本仪器中主要用来显示测量的进程、结果和生成的图形。
数据在打印时,考虑到仪器需便于移动、打印方便等特点,因此,打印机采用μp-A面板式微型打印机。该打印机可以打印ASCII字符,英文字符、少量的汉字和各种图形符号,可直接用单片机进行控制,编程简单,且这种打印机体积小,可以镶嵌在仪器内,采用针式打印,打印成本低。
数据存储采用SD卡,SD卡具有存储容量大、掉电数据不丢失等优点,是现在各种电子产品中广泛使用的存储设备,造价不高。单片机在读写SD卡时,需要用四个端口模拟SPI模式来实现与SD卡的通信,四个端口分别连接SD卡的片选(CS)、数据0(D0)、数据1(D1)和时钟信号(SCL)[7]。因此,用P1.4~P1.7四个引脚接SD卡进行数据存储。这里要注意的是,SD卡的逻辑电平相当于3.3VTTL电平标准,而单片机的逻辑电平为5V,高于SD卡工作时的电压,若直接相连,会烧毁SD卡。因此,需要解决电平匹配问题。本文采用74HC244作为电平转换芯片。单片机与SD卡通过一片74HC244连接,当对74HC244输入3.3V电压时,不论输入高电平是5V还是3.3V,其输出高电平均为3.3V,可以满足电平匹配问题。
综合以上部分,所设计仪器的硬件电路原理如图4所示。

图4 硬件电路原理图
3 软件设计
本文设计的测量仪软件包括两部分:一部分为硬件控制程序,另一部分为数据后处理程序。
硬件控制程序主要有系统主程序、初始化程序、中断服务程序、键盘扫描子程序、键盘处理及数据处理子程序、打印子程序、串行通信子程序、步进电机控制子程序、数据采集及处理子程序、报警子程序等。数据进一步详细的处理需在PC机上进行,本文还编制了测量仪与PC机之间的通信程序,用来实现二者的通信。测量数据的后处理是所设计的测量仪的另一个重点部分。数据的后处理一般要完成以下工作:实测表面图数据的预处理、坐标系的确定、坐标值的计算、设计表面的绘制、实测表面与设计表面的比较等。所设计的测量仪的软件系统流程如图5所示。
开始测量时,首先设定需要测量的表面范围,然后CPU向激光测距元件发送测量命令,对一个点进行测量,测量完成后将当前点的测量数据和关系数据存入到SD卡中,同时传输该数据至PC机,然后判断所设定的测量范围是否测量完成,若测量完成,则判断一行是否测完,若一行测量完毕,则步进电机1转过一个步距角,进行下一行的测量,若一行没有测完,步进电机2转动一个步距角,进行该行下一个点的测量。因为激光测距元件在步进电机2的带动下绕X轴转动时,假设测量第一行是顺时针从0°旋转到180°,那么第一行测量完成后,第二行的测量就要使激光测距元件逆时针从180°旋转到0°。因此,程序在运行时,需要判断所测量的是奇数行还是偶数行,以确定步进电机2的转向。当测完整个表面后,操作者可以选择是否打印测量数据。最后,相关数据清零,为下一次测量做好准备。

图5 测量程序流程
软件的硬件控制程序采用C语言编写,并通过Keil C51软件编译成HEX文件,下载到单片机中。考虑到MATLAB具有较强的数据处理功能,PC机中的数据后处理软件采用MATLAB与VC++混合编程的方法,在VC++中调用 MATLAB程序,完成对数据的后处理[8]。整个仪器的程序较为繁琐,因此,以下仅给出几个关键部分的程序代码。
(1)激光测距元件测量命令关键代码:
send_ch("a\r\n");//发送复位命令
DelayMS(10);//延时10ms
send_ch("G\r\n");//发送测量命令(G命令)
DelayMS(10);//延时10ms
for(i=0;i<=14;i++)//接收激光测距元件返回的测量结果,存在数组a中
{
a[i]=get_byte();//get_byte()为从串口接收缓冲区读取数据的函数
}
(2)步进电机控制关键代码(步进电机1正转代码):
P1_5=0;//P1.5置为低电平,控制步进电机1正转
P1_4=0;//P1.4置为低电平
DelayMS(5);//延时5ms
P1_4=1;//P1.4置为高电平,向步进电机驱动器发送走步脉冲
DelayMS(5);//高电平状态延时5ms
P1_4=0;//P1.4置为低电平,一个脉冲结束
(3)数据存储关键代码:
FAT32_Create_File(&FileInfo,"\\data.txt",Create_DT);//在SD卡中创建保存数据的文本文档data.txt
strcpy(str,&a);//将数组a中的数据拷贝到数组str中
strcat(str,"\r\n");//在str数据后加换行
FAT32_Add_Dat(&FileInfo,strlen(str),str);//将数据写入data.txt文件
FAT32_File_Close(&FileInfo);//关闭文件
(4)数据发送至PC机关键代码:
while(cp[i]!=0)//判断字符串是否结束
{
TI=0;
SBUF=cp[i];//发送一字节
while(!TI);//发送完毕
i++;//移到下字节
}
4 测量实例
为了验证仪器的使用情况,选择某塑料棚的局部进行了试验测量,并绘制了所测表面的三维图形。
按照图5给出的测量流程,使用隧道表面激光测量仪对所选表面进行测量,测量完成后,将所测得的距离值按照球面坐标系转换为OXYZ三维直角坐标系,测量及转换后的部分数据如表1所示。其中,测量位置(i,j)中的i表示测量的是第i个断面,j表示测量的是第i个断面的第j个点。通过数据后处理软件将所测点的数据进行处理,生成所测表面的网格图,如图6所示,图中X轴平行于(或重合于)隧道中线,Y轴与隧道中线垂直,因此,XOY坐标平面为水平面,Z轴为垂直于XOY坐标平面(水平面)的轴。

表1 实际测量的部分数据
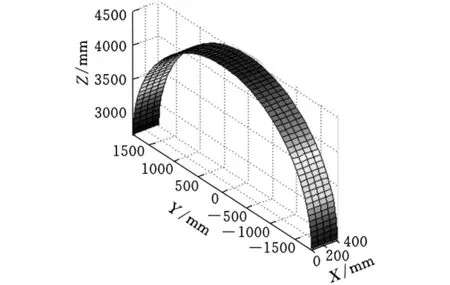
图6 墙面的三维图
5 结束语
本文采用激光测距元件作为测量传感器,设计研制了激光隧道表面测量仪,并对该仪器的硬件组成、控制软件和数据处理软件进行了分析和设计。该仪器可以实现绕相互垂直的X轴和Y轴转动,能对隧道表面的形状进行测量,并生成被测量表面的三维图。使用该仪器对实际墙面进行了测量,测量数据和生成的墙面图形符合被测表面的实际形状。该测量仪除了可以测量隧道表面形状外,还可以用于一般物体的外形测量,如煤堆、土堆等外形的扫描测量,以此来推算其体积和重量。仪器测量速度快、测量准确、便于携带、用途较为广泛。
[1]张清富,杨武装.简易型激光断面仪的研制和使用[J].隧道建设,2003,23(5):55-56
[2]刘坤,陈芳.激光测距方法及激光器的发展[J].科技资讯,2008,30:387-388.
[3]刘宏,姜力.仿人多指灵巧手及其操作控制[M].北京:科学出版社,2010.
[4]常凤筠,崔旭东.基于激光测距传感器的汽车防撞报警器的设计[J].应用激光,2007,27(1):45-46.
[5]熊维海.隧道断面测量技术[J].中国测试技术,2004(2):41-43.
[6]刘换成.工程背景下的单片机原理及系统设计[M].北京:清华大学出版社,2008.
[7]尚怡君,葛明涛.SPI模式下对SD卡的读写控制[J].光盘技术,2009(14):195-199.
[8]刘静,吴衍青,汤宇晖.Matlab/VC++/Access组合编程方法及其应用[J].计算机工程,2001,27(3):23-24.
