矿用电机车矢量控制系统的研究设计
2012-08-28邓永红潘玉民张全柱黄成玉
邓永红, 潘玉民, 张全柱, 黄成玉
(华北科技学院信息与控制技术研究所,北京 101601)
0 引言
矿用电机车是工矿企业的一个传统设备,按照供电方式的不同可分为:架线电机车、蓄电池电瓶电机车;按照牵引力大小可分为5 t、8 t、12 t、20 t、24 t等系列电机车;按照调速方式的不同可分为直流牵引电机串电阻调速,直流牵引电机斩波调速和交流牵引电机变频调速。从技术发展的趋势来看:架线车与蓄电池电瓶车会并行发展,而且以较大吨位(12 t、20 t)的蓄电池电瓶车占主导;直流斩波调速将取代传统的串电阻调速;交流牵引电机变频调速将取代直流牵引电机调速。交流牵引电机车与直流牵引电机车相比,具有体积小、重量轻,可靠性高、维护量小,无滑环和换相器,易于安全防爆等优点,同时交流变频调速具有明显的节能效果、耗能和发热量都明显减少。故交流牵引电机车取代直流牵引电机车,用先进的交流变频调速技术取代传统的直流串电阻和直流斩波调速技术是矿用电机车发展的必然趋势。
电机车负载变化频繁,供电电源波动大,工作环境恶劣,带载重,要求起动力矩大,同时要能在5‰的坡上停车,根据电机车的特点和应用的实际要求,采用交流变频调速方案,对矿用电机车的直流传动系统进行改造。兼顾技术先进性和工程实用性,采用SVPWM控制算法,研究电机车的反馈解耦型电压矢量控制[4]变频调速系统,有很好的实用意义。
1 反馈解耦型电压矢量控制
矿用电机车控制系统框图如图1所示。蓄电池或架空线提供直流电压,通过三相逆变器单元输出频率可调的交流电。电机车交流变频调速系统可分为主电路、控制系统、检测电路三个组成部分。其中主电路主要由蓄电池(也可以是架空线直流电压源)、充电回路、滤波支撑电容、三相逆变桥、三相交流异步牵引电机组成。控制系统主要由 dsPIC6010A[1-3]单片机控制电路、光纤板及电源模块电路、驱动电路、液晶显示及给定操作模块等组成。检测电路主要由电压传感器及检测模块、电流传感器及检测模块、温度传感器及检测模块、电机转速传感器及检测模块组成。

图1 系统控制框图
1.1 矢量控制原理及反馈解耦
电机的调速控制关键是控制其转矩,但异步电机的转矩与磁链、电流间存在复杂的耦合关系,难以像直流机那样独立控制。转子磁场定向[4]可解决这一问题,定向后的电机模型如下:

式中:Usd、Usq——定子电压d、q轴分量;
isd、isq——定子电流d、q轴分量;
Ψr——转子矢量磁链的幅值;
Te——电磁转矩;
ωs——同步角速度;
Rs、Rr——定、转子电阻;
Ls、Lr——定、转子等效自感;
通过样机作业试验,对样机压缩、进料、打带、锯截等系统功能进行测试,检验各项功能与设计要求达标情况;检验液压控制系统及操控系统的响应性、稳定性、可靠性;对样机山地行驶性能进行测试;对枝丫材捆产品质量及性能参数进行测试分析;体验人工劳动强度,计算作业效率。
Lm——定、转子等效互感;
np——极对数;
σ——漏磁系数,σ =1 -sLr。
由式(2)可见,电磁转矩的表达式较以往大为简化,转矩与转子磁链Ψr及定子q轴电流isq有关,Ψr由d轴定子电流isd决定。因此,转子磁场定向实现了转矩、磁链与定子电流间的解耦,控制d、q轴的电流就可分别对磁链和转矩进行调节。
但是电机调速系统的控制输入为定子电压,从式(1)可看出电流与电压间仍存在两轴之间的耦合关系。为了消除两轴之间的耦合关系,必须采用适当的电压解耦算法。
电压解耦算法的本质就是在d、q轴电流控制器的输出信号、处分别加上解耦电压项,从而使得定子两轴的给定电压为


图2 电压解耦型矢量控制系统与异步电机的关系示意图
反馈解耦[5]根据定子电流两轴分量的反馈值isd和isq来生产解耦电压项和,并采用图3所示的控制结构图。
1.2 控制系统原理及特点
图4所示为矿用电机车交流变频调速系统反馈解耦型电压矢量控制系统框图。从图中可看出,通过对控制系统参数的调节,取得了很好的解耦效果和较高的系统控制性能,系统实现了电流的快速调节和转速的无静差控制,从而进一步改善了系统的动态调节性能,弥补了传统的转差频率控制的缺点。

图3 反馈解耦控制原理图
图4中,牵引电机速度由司机速度手柄给定为ω*,可调节电机车牵引电机M的转速。电机速度外环采用PI调节器进行调节,司机速度手柄给定电机的速度ω*与电机实际速度ω的差值作为速度PI调节器的输入,速度PI调节器的输出作为电机转矩给定值。转子磁链给定值由转子磁链给定单元产生,受电机转速ω的控制,当ω小于电机额定转速时,为一恒定值,当ω大于电机额定转速时,与电机转速成反比关系。
励磁电流给定值由转子磁链给定值根据式(4)计算出。
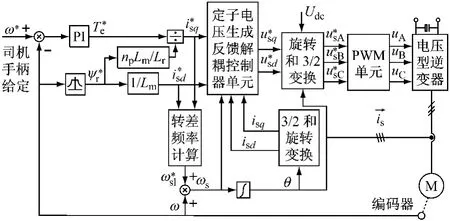
图4 反馈解耦型电压矢量控制系统框图

转矩电流给定值由转矩给定值和转子磁链给定值根据式(2)计算得出。


从电机定子实测的三相电流isA,isB,isC经过3/2变换单元和旋转变换单元产生定子电流的励磁分量反馈值isd和转矩分量反馈值isq。与isd,isq经过定子电压生成单元反馈解耦控制器的作用,产生定子电压的d、q轴分量给定值、,再经过旋转变换单元和2/3变换单元得到定子三相电压的给定值,,,连同实测直流母线电压Udc一起送入PWM[6]单元,并按照一定的PWM规律进行调节,产生电压型逆变器所需的三相 PWM 脉冲信号uA,uB,uC。
1.3 软件实现
控制系统采用微芯单片微机dsPIC30F6010A,它集DSP的信号高速处理能力和适用于电机控制的优化外围电路于一体,是专门为电机的数字化控制而设计的,系统的性价比较高。利用单片机内部丰富的集成器件,可减少DSP外围所用的元器件;它丰富的、功能强大的中断服务系统及常用的I/O接口,使上述算法编程方便,大大简化了硬件电路。图5给出了用dsPIC30F6010A实现反馈解耦型电压矢量控制算法的软件流程图,以及中断服务程序的软件设计方法。
控制系统主要由五个部分组成:(1)由dsPIC6010A、外部数字量输入和速度采集等组成的DSP数字系统,它能完成各种数字计算,外部端子控制,电机车的起停、正反转、点动、多段速给定等功能。(2)模拟接口电路,主要由电压和电流调理电路、温度调理电路、给定电机速度电路等组成。电压和电流采集主要是把强电转换为弱电信号,供DSP进行采样。(3)IGBT驱动电路,它把DSP系统发出的SVPWM信号转化为可以驱动IGBT的脉冲信号,同时当IGBT发生短路或过流故障时,向DSP系统反馈故障信号。(4)液晶操作键盘,可以通过键盘设定各种参数,设定电机车控制系统的各种状态,查询历史故障记录等。

图5 软件流程图
2 试验结果
对上述电机车反馈解耦型电压矢量控制系统,在蓄电池矿用电机车上进行了实现。系统主要参数如下:蓄电池输出电压DC 180 V,牵引电机额定功率22 kW×2,额定电压AC 130 V,额定电流127 A,电机极数4极。图6(a)所示为电机车电机空载起动时定子电流的波形,40 A/div,电机车4~5 s内完成起动,达到稳定运行状态。从图中可以看出,起动电流波形平稳。图6(b)为电机车带载运行时,定子电流和电压波形图,电流为127 A(测量所用电流探头变比为20∶1),电压幅值为180 V,电机车稳定运行。
3 结语

图6 电机起动电流波形及带载运行时电流、电压波形
针对矿用牵引电机车,研究实现了反馈解耦型电压矢量控制策略,成功开发了基于微芯单片机dsPIC30F6010A的矿用电机车矢量控制系统。设计的控制系统硬件电路简洁、模块化强、参数设置灵活、动态性能好,可以推广应用于不同种类(牵引力、供电电压等级的不同)的矿用电机车。基于本文方法的控制系统起动力矩大,起动过程平稳,调速平滑可靠,具有较好的工程实用及应用推广价值。
[1]何礼高.dsPIC30F电机与电源系列数字信号控制器原理与应用[M].北京:北京航天航空大学出版社,2007.
[2]刘和平.Dspic通用数字信号控制器原理及应用[M].北京:北京航天航空大学出版社,2007.
[3]王晓明.电动机的Dsc控制:微芯公司 dspic应用[M].北京:北京航空航天大学出版社,2006.
[4]陈伯时.高动态性能交流调速系统的发展与演变(Ⅰ)安转子磁场定向的矢量控制系统[J].电力电子,2004,2(1):33-36.
[5]李微,感应电机矢量控制系统研究[D].北京:北京交通大学,2000.
[6]YU Z Y.Space-vector PWM with TMS320C24x/F24x using hardware and software determined switching patterns[D]. TexasInstrumentLiterature Number SPRA524,1999.
