基于角速度修正的变结构多模型目标跟踪算法
2012-08-27梁国威丁全心
田 野, 蒋 宏, 梁国威, 丁全心
(1.北京航空航天大学自动化科学与电气工程学院,北京 100191;2.光电控制技术重点实验室,河南 洛阳 471009)
0 引言
对于强机动目标跟踪问题,交互式多模型(Interactive Multiple-Model,IMM)算法和变结构多模型(Variable-Structure Multiple Model,VMM)算法是两种解决途径[1-3]。Li提出的基于有向图切换的 VMM 算法——有向图切换交互式多模型(Switching Grid IMM,SGIMM)算法突破了IMM算法模型集固定的限制,其基本思想是用一个时变的模型集合来代替固定的模型集合[4-5]。但是 SGIMM 算法存在有向图切换不准确的问题,有向图切换规则基于模型概率,如何选取门限值是一个难以解决的问题,门限值选取过小,则有向图切换过于频繁,造成很多不必要的切换,门限值选取过大,则造成严重的有向图切换滞后,两种情况都会造成目标跟踪性能下降[6-7]。
基于SGIMM算法存在的模型集切换不准确的问题,本文通过对机动目标的角速度进行估计,提出了基于角速度修正的支撑有向图,设计出一种角速度自适应的变结构多模型目标跟踪算法:即根据角速度估计值实时修正有向图,在有向图切换的基础上,检测角速度估计值是否被有向图覆盖;当角速度估计值不能被有向图覆盖时,调整有向图的边界,使有向图覆盖角速度估计值。该算法解决了有向图切换过快与滞后时模型不匹配的问题,增强了有向图对目标真实运动模式的覆盖能力,提高了机动目标的跟踪精度。
1 模型分析
将目标的运动建模为二阶圆周运动模型

其中:M为模型集;j为模型编号;Fj为第j个模型的状态转移矩阵;Gj为干扰转移矩阵;Wj(n)为服从N(0,Qj)的模型噪声;Qj为协方差矩阵;目标状态X(n)=′由目标的位置和速度组成。则状态转移矩阵和干扰转移矩阵分别为
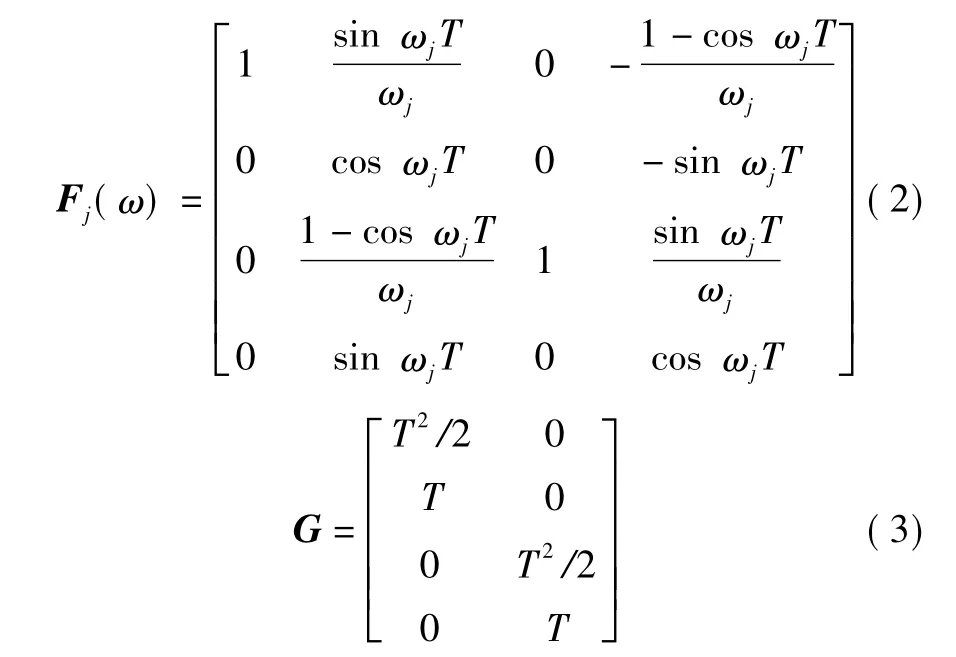
状态转移矩阵Fj中包含角速度ω参数。当ω趋近于0时,该模型表示目标做近似直线运动;ω>0时,该模型表示目标做角速度为ω的左转弯运动,ω<0时,该模型表示目标做角速度为ω的右转弯运动。目标的机动被刻划为从模型i到模型j之间的转换,由有限状态的马尔可夫链来描述,其模型转移概率为Pij。
传感器的观测模型为

其中:Z(n)为观测值;V(n)为服从N(0,R)的观测噪声,设Wj(n)和V(n)相互独立。理想观测器的观测矩阵为

2 算法设计
2.1 SGIMM 算法
假设目标以未知的一组角速度ω机动运动,目标角速度ω的范围为[-ωmax,ωmax],构造包含2s+1个模型的模型集Mω={ωm},其中:

将角速度值代入式(2)可得到模型集中各个模型的状态转移矩阵F(ωm)。以2s+1个模型构造出的支撑有向图如图1中D所示[8]。
在有向图基础上,选择D(i)作为子有向图,即一个模型子集 M(i)={ωi-1,ωi,ωi+1},局部转移概率矩阵为
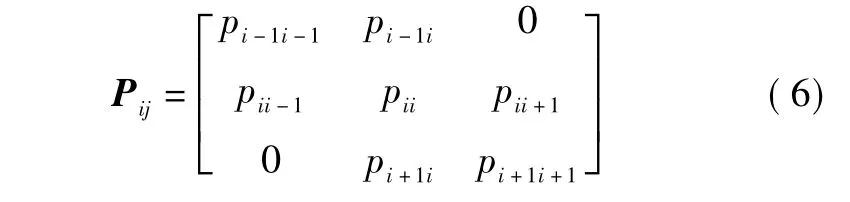
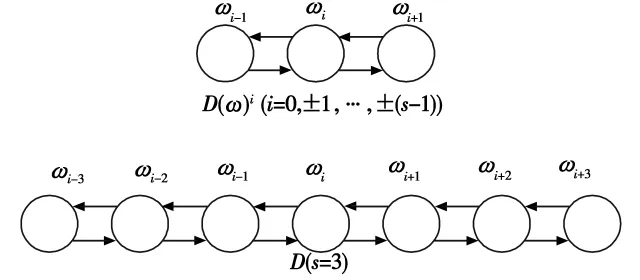
图1 支撑有向图Fig.1 Supporting digraphs
建立对于模型集自适应的子有向图切换规则Dk=,当前时刻的模型集不匹配目标的真实运动模式时,模型集中中心模型的模型概率下降,而位于两侧的模型的模型概率上升,此时中心模型切换为模型概率较大的那个模型(大于某个设计参数),这样就完成了有向图的切换。假设k-1时刻选取的有向图为 Dk-1=D(i),i= ±1,±2,…,± (s-1),则决策规则为
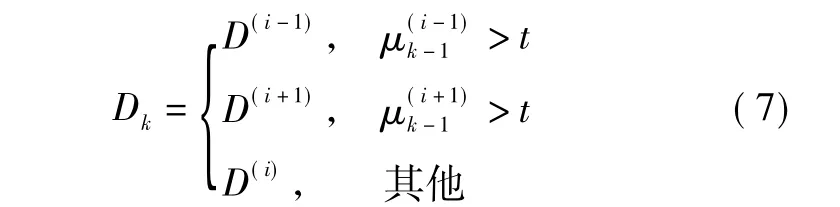
SGIMM算法按照规则只能在相邻的有向图之间切换,模型间距固定。当目标机动时,若模型间距过大,会出现模型切换滞后;若模型间距过小,又会造成有向图的频繁切换,造成跟踪性能下降。
2.2 角速度估计
构造角速度状态方程和观测方程,运用卡尔曼滤波的方法来得到更准确的角速度ω的估计值^ω。状态方程和观测方程分别为[10]

其中:zω(n)为角速度观测值;wω(n)为角速度的随机变化量,其方差为Qω(n);vω(n)为角速度观测噪声,其方差为 Rω(n),Qω(n)和 Rω(n)相互独立。
根据卡尔曼滤波公式,角速度滤波公式见式(10)
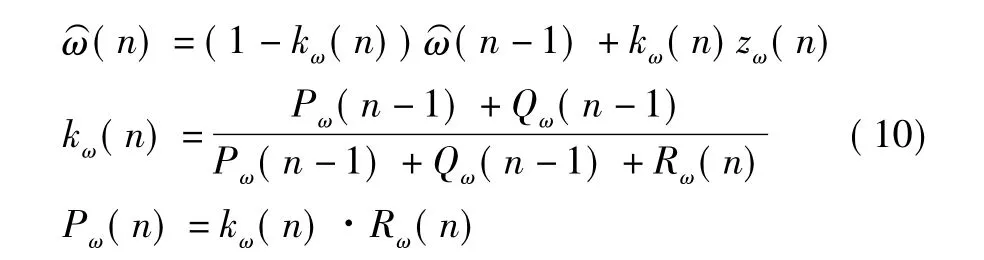
根据圆周运动的规律,并假设左转弯方向角速度为正,则角速度观测值为

由于zω(n)的求取公式是强非线性的,因此zω(n)的分布非常复杂。本文采用Julier提出的一种新的求解方法,随机变量经非线性变换后,可以不需要计算雅可比矩阵,来估计非线性变换后变量的方差Rω(n)。所得的估计方差的精度可达到方差的四阶泰勒展开式以上[12]。方差的近似计算公式为

其中:zi(n)为式(9)采样点的非线性变换值,i=0,1,2,…,8;Wi为每个采样点的权值。采样点按文献[12]选取。
对于角速度ω的随机变化量wω,采用类似Singer模型的方式进行建模[13]。假设 wω=0的概率为 P0,时,wω在±A之间均匀分布。则wω的方差为

2.3 角速度自适应的SGIMM算法(ASGIMM)
基于角速度的有效估计,设计出模型间距可调的基于角速度修正的有向图。有向图中模型集不能覆盖角速度估计值时,通过调整有向图中模型间距,使之覆盖角速度估计值即和时,D(i)的支撑有向图修正为如图 2 所示的仍然是整个有向图的一个强覆盖。
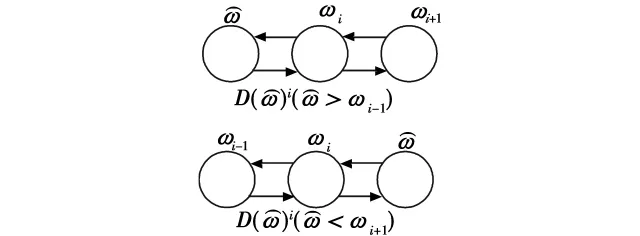
图 2 和时的子有向图Fig.2 Sub-digraphs whenand
3 仿真
将IMM算法,SGIMM算法和本文ASGIMM算法的跟踪性能进行仿真比较。标准IMM算法的模型集设置为 ωL=0.4 rad/s,ωC=0 rad/s,ωR= -0.4 rad/s。SGIMM 算法中 ωmax=0.4 rad/s,s=3,门限值 t=0.9。
图3为测试轨迹。采样时间T=1 s,采集200个点。目标初始位置为(60000 m,40000 m),初速度为(640 m/s,480 m/s)。目标在41~133 s做角速度为2.9(°)/s的左转弯匀速圆周运动,在134~158 s做角速度为7.2(°)/s的右转弯匀速圆周运动,其余部分为匀速直线运动。最大角速度变化值为10.1°,最大过载10g。X方向和Y方向的位置观测噪声标准差都是200 m。

图3 测试轨迹Fig.3 Simulation scenario
进行100次Monte Carlo仿真。图4为测试轨迹角速度估计值与真实角速度的对比曲线,从图中可以看出,本文的角速度估计方法能有效估计目标角速度值。

图4 角速度估计曲线Fig.4 Turn rate estimation
图5 ~图8为3种算法在测试轨迹1下X、Y方向上的位置和速度均方根误差(RMSE-Root Mean Square Error)曲线。从图5~图8可以看出:在目标常规机动时,SGIMM算法能对目标有效跟踪,跟踪性能优于IMM算法;在目标连续强机动时,SGIMM算法跟踪性能迅速下降,会出现跟踪丢失的现象,不能对机动目标进行有效跟踪;模型集选取尽可能大的IMM算法在目标强机动时,跟踪误差与观测噪声标准差相近,跟踪性能不高。而本文的算法通过角速度估计,修正SGIMM算法中有向图切换不准确的问题,极大地提高了目标跟踪性能,在目标运动的各个阶段,跟踪性精度都很高,有效地解决了目标连续强机动时SGIMM算法出现的跟踪误差急剧增大现象。
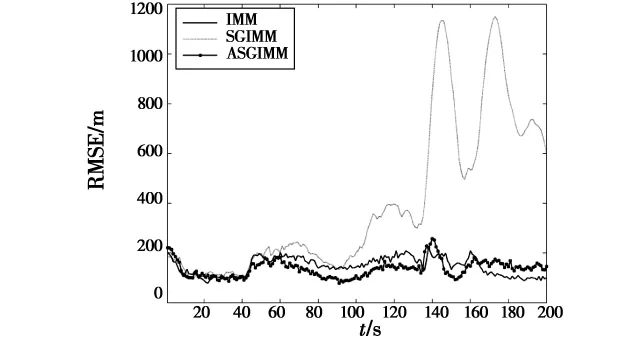
图5 X方向上位置RMSEFig.5 Position RMSE in X-axis
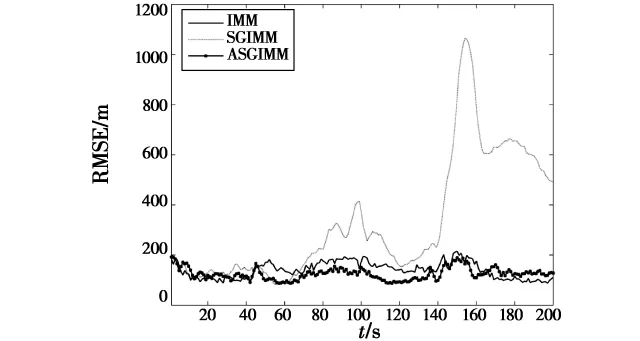
图6 Y方向上位置RMSEFig.6 Position RMSE in Y-axis
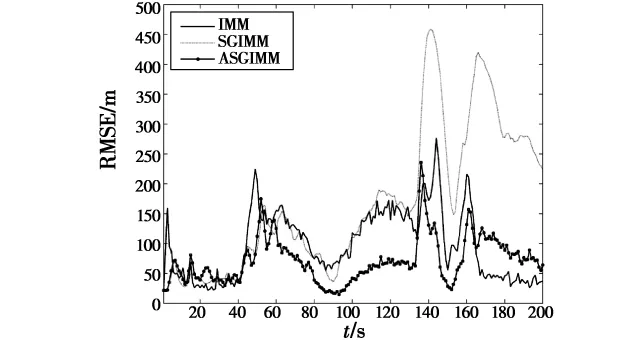
图7 X方向上速度RMSEFig.7 Speed RMSE in X-axis

图8 Y方向上速度RMSEFig.8 Speed RMSE in Y-axis
4 结论
SGIMM算法在目标机动时通过自适应切换有向图实现模型集自适应调整,解决了IMM算法模型集结构和大小固定的缺点,但它存在着目标连续强机动时有向图切换不准确的问题。本文通过对角速度的有效估计,实时修正有向图,使模型集能较准确地覆盖目标真实运动模式,抑制了有向图切换过快与滞后造成的跟踪性能下降,极大地提高了跟踪精度。仿真表明,本文提出的算法在目标连续强机动时,跟踪性能没有明显下降,在目标的各个运动段,本文算法都很好,证明了本文算法的有效性。
[1] BLOM H A,BAR-SHALOM Y.The interacting multiple model algorithm for systems with markovian switching coefficients[J].IEEE Transactions on Automatic Control.1988,33(8):780-783.
[2] MAZOR E,AVERBUCH A,BAR-SHALOM Y,et al.Interacting multiple model methods in target tracking,a survey[J].IEEE Transactions on Aerospace and Electronic Systems,1998,34(1):103-123.
[3] LI X R.Hybrid estimation techniques[M].Control and Dynamic Systems:Advances in Theory and Applications.San Diego:Academic Press.1996.
[4] 孙庆鹏,孔祥维,卢聪聪,等.用于非线性机动目标跟踪的新型IMM算法[J].电光与控制,2008,15(8):14-31.
[5] 徐长爱,李尚生,殷勇,等.角闪烁背景下基于IMM算法的末制导雷达目标跟踪[J].电光与控制,2009,16(1):67-74.
[6] ZHANG Min,CHEN Weidong.Variable structure multiple model particle filter for maneuvering radar target tracking[C]//2010 International Conference on Microwave and Millimeter Wave Technology(ICMMT),2010:1754-1757.
[7] LI X R,BAR-SHALOM Y.Multiple-model estimation with variable structure[J].IEEE Transactions on Automatic Control,1996,41(4):478-493.
[8] LI X R,JILKOV V P,RU J.Multiple-model estimation with variable structure-part VI:Expected-mode augmentation[J].IEEE Transactions on Aerospace and Electronic Systems,2005,41:853-867.
[9] JILKOV V P,ANGELOVA D S,SEMERDJJEV T A.Design and comparison of mode-set adaptive IMM algorithms for maneuvering target tracking[J].IEEE Transactions on Aerospace and Electronic Systems,1999,35:343-350.
[10] ANDERSON B D O,MOORE J B.Optimal filtering[M].Prentice-hall,Inc,1979.
[11] HE YAN,GUO Zhijiang,JIANG Jingping.Design of the adaptive interacting multiple model algorithm[C]//American Control Conference,2002:1538-1542.
[12] JULIER S,UHLMANN J,DURRANT-WHYTE H F.A new method for the nonlinear transformation of means and covariances in filters and estimators[J].IEEE Transactions on Automatic Control,2000,45:477-482.
[13] SINGER R A.Estimating optimal tracking filter performance for manned maneuvering targets[J].IEEE Transactions on Aerospace and Electronic Systems,1970:473-483.
