低快拍下多输入多输出雷达中的角度估计算法
2012-08-09李建峰张小飞
李建峰 张小飞
(南京航空航天大学电子信息工程学院;江苏 南京210016)
引 言
多输入多输出(MIMO)雷达用多个天线同时发射信号,用多个天线接收反射回的信号,跟传统相控阵雷达相比,有很多优点[1-5]。相比单个发射天线,MIMO雷达拥有更多的自由度,可以克服衰落效应,提高空间分辨率,增强参数识别能力和提高目标侦测性能[6-10]。目前,MIMO雷达中已经有很多离开角(DOD)和波达角(DOA)估计算法,包括借助旋转不变技术的信号参数估计(ESPRIT)方法[11],Capon方法[12],多重信号分类 (MUSIC)方法[13],平行因子算法[14]以及自适应平行因子方法[15]等,以上算法在比较高的快拍数下,能获得较好的性能,而在较低的快拍下,性能就会变得很差。文献[16]提出了一种单快拍数下双基地MIMO雷达的角度估计算法,该算法需要两个一维谱搜索估计,复杂度高;还需要额外的参数配对。为此,文中提出了低快拍下的MIMO雷达中一种低复杂度、自动配对的角度估计算法,该算法利用矩阵束(Matrix Pencil)方法来实现DOD和DOA的较准确的联合估计,通过构造矩阵,能实现甚至在单快拍下的角度估计,算法复杂度低于ESPRIT算法,且估计的角度能自动配对;同时,论文中所提算法的角度估计性能好于ESPRIT算法。
1.理论分析
1.1 数据模型
考虑双基地MIMO雷达中,发射阵列M元的均匀线阵(ULA),接收阵列为N元的ULA,阵元间隔半波长。假设有D个不相关的目标,则接收端匹配滤波器的输出为

式中:θd,ød分别是第d个目标对应于发射阵列的DOD和对应于接收阵列的,i为虚部符号;fd为多普勒频移;βd是反射系数,不同目标之间不相关,(·)T表示矩阵转置;n(t)是MN×1的高斯噪声向量,均值为0,协方差矩阵为σ2IMN,IMN是MN×MN的单位矩阵;ar(ød)⊗at(θd)是对应于第d个目标的发射方向矢量和接收方向矢量的Kronecker积,其中


式中exp(-iπ)代表e-iπ.

式中:N∈CMN×J是噪声矩阵;B=[b(1),b(2),…,b(J)]∈CD×J.
无噪声时,X的第((n-1)M+m)行为
式中bd是B的第d行。定义

式中E[·]代表求期望;(·)H表示矩阵的共轭转置。忽略多普勒频移影响,则

式中ad=bd.利用式(6)构造增广矩阵

其中

Rm为Q×(N-Q+1)的Hankel矩阵,将式(7)代入式(9),得

式中:

式中diag(v)表示一个对角矩阵,其对角元素为v.


将式(10)代入式(8),得到

式中:

1.2 基于矩阵束的角度估计算法
1.2.1 DOA估计
对Re进行奇异值分解,得到

式中:Usa、Dsa为包含信号子空间的D个主特征向量与主特征值;Una、Dna分别包含其他特征值与特征向量。由于EL与Usa张成相同的信号子空间,因此,存在唯一K×K的非奇异矩阵T1,使得

根据式 (15),定义

式中:Ua1表示由信号特征向量矩阵Usa的前(P-1)Q行构成的矩阵;Ua2表示由信号特征向量矩阵Usa的后(P-1)Q行构成的矩阵;E1表示由信号特征向量矩阵EL的前(P-1)Q行构成的矩阵。由式(18)得

定义Fa=Ua2,其中(·)+表示矩阵的广义逆。对Fa进行特征值分解,对应的特征矢量则达到T1的估计

式中,Π为列交换矩阵,而且Π-1=ΠT,其中(·)-1表示矩阵求逆。所以在无噪声情况Xd的估计

假设对Fa进行特征值分解得到特征值,则DOA的估计为

式中angle(·)表示取相位。
1.2.2 DOD估计
通过对EL左乘一个置换矩阵,得到

式中:

用此置换矩阵乘以Usa,可得

同理,定义

式中:Ud1表示由信号特征向量矩阵Usd的前(Q-1)P行构成的矩阵;Ud2表示由信号特征向量矩阵Usd的后(Q-1)P行构成的矩阵;E1C表示由信号特征向量矩阵ELC的前(Q-1)P行构成的矩阵。由式(24)得

则

因为Yd=(E1CYd),可以通过下式得到Yd的估计


假设估计出的Yd的对角元素为,则DOD的估计为

至此,将此基于矩阵束的角度估计算法流程总结如下:
1)根据接收数据通过式(6)构造r(τ,ζ);
2)选择合适的P值和Q值(注1),构造出式(8)中的Re和式(9)中的Rm;
3)对Re进行奇异值分解,取其左奇异向量Usa的前(P-1)Q行Ua1,后(P-1)Q行Ua2,并对Ua2特征值分解,得到特征值,根据公式(22=asin(angle)/π),从特征值中得到 DOA 的估计,根据式(20)从特征矢量得到T1的估计;
4)将Usa左乘一置换矩阵进行重构,得到Usd,并取其前(Q-1)P行Ud1,后(Q-1)p行Ud2,根据式(27)得到Yd的估计,并取其对角元素得到,再根据式(29=asin(angle/π)),得到DOD的估计
注1:P,Q的选取应满足M-D+1≥P≥D+1,N-D+1≥Q≥D+1;P,Q的选取,旨在构造增广矩阵,相当于增大快拍数,使角度估计在低快拍下也能获得很好的性能。构造增广矩阵之后,由公式(11)~(17),可以把Q看成新的接收阵列长度,把P看成新的发射阵列长度。注2:根据公式(21)和(28),我们发现估计出DOD和DOA具有相同的列模糊,所以该算法能自动进行二维角度配对。
1.2.3 复杂度及克拉美-罗界(CRB)
根据文献[17],可以给出双基地MIMO雷达中的CRB为

2.实验结果分析
2.1 仿真结果及分析
图1和图2给出了在M=8,N=8,J=4,信噪比(SNR)分别为0dB,4dB的情况下,该算法的角度估计性能,从图1和图2中可以看出:即使在很低的快拍数下,很低的信噪比下,目标角度都可以被较准确地估计出来。
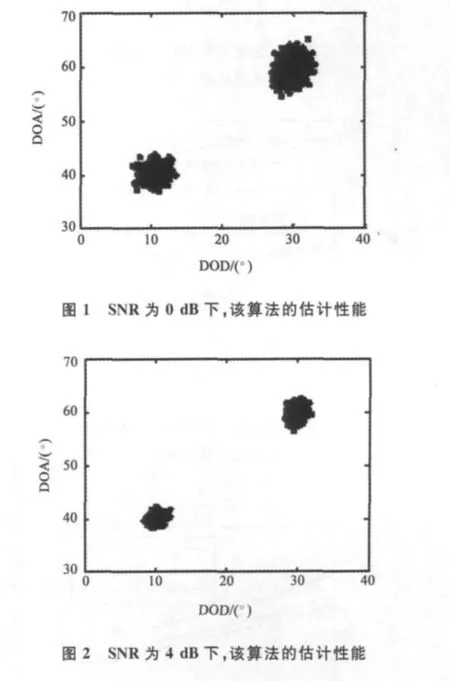
图3和图4则是M=8,N=8,J=4和M=8,N=10,J=1的情况下,该算法与ESPRIT算法以及CRB的比较,可以看到文中所提算法的RMSE和CRB比较接近,而在J=1的情况下,ESPRIT算法已失去估计能力,所提算法依然可以准确估计出角度,所提算法的角度估计性能优于ESPRIT算法,而此时ESPRIT算法的复杂度为O(520 704),所提算法复杂度为O(832 8),远低于ESPRIT算法复杂度。
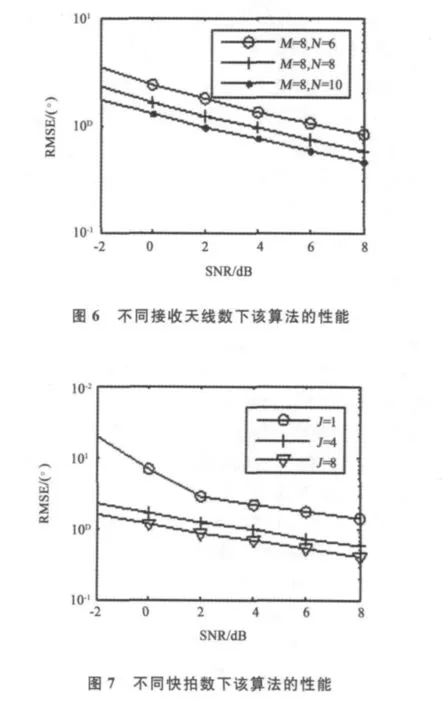
图5和图6给出了J=4,发射和接收天线数不同的情况下,该算法的估计性能。可以看出:随发射和接收天线数增加,估计性能提升。天线数增加,分集增益增强,性能得到提升。

图7则是M=8,N=8,快拍数不同的情况下,算法的估计性能。从图7中可以看出:快拍数增加,估计性能有所提升。
2.2 算法优点
至此,将此基于矩阵束的角度估计算法的优点总结如下:
1)该算法无需谱峰搜索,而且其复杂度低于ESPRIT算法;
2)在低快拍情况下论文中所提算法的角度估计性能优于ESPRIT算法;
3)该算法能工作在单快拍下;
4)该算法能对二维角度自动配对。
3.结 论
文中提出了双基地MIMO雷达中的一种低快拍低信噪比下的DOD和DOA联合估计算法。该算法利用矩阵束方法构造矩阵,通过奇异值分解和ESPRIT方法获得角度信息。该算法估计的角度能自动配对,无需谱峰搜索,复杂度低于传统的ESPRIT算法,而且其角度估计性能在低快拍下优于传统ESPRIT算法。一系列仿真验证了该算法的有效性。
[1]FISHLER E,HAIMOVICH A,BLUM R S,et al.MIMO radar:an idea whose time has come[C]//Proc IEEE Radar Conf,26-29April,2004:71-78.
[2]LI J,STOICA P.MIMO radar-diversity means superiority[C]//Proceeding of 14th Annual Workshop A-daptive Sensor Array Processing Workshop.Lexington,December 2006:201-207.
[3]LI X,ZHANG Z,et al.A study of frequency diversity MIMO radar beamforming[C]//IEEE 10th International Conference on Signal Processing.Beijing,24-28October,2010:352-356.
[4]SHARMA R.Analysis of MIMO radar ambiguity functions and implications on clear region[C]//IEEE Radar Conf,June 2010:544-548.
[5]刘晓莉,廖桂生.多基线数据融合的双基地MIMO雷达角度估计[J].电波科学学报,2010,25(6):1199-1205.LIU Xiaoli,LIAO Guisheng.Angle estimation based on multibaseline data fusion for bistatic MIMO radar[J].Chinese Journal of Radio Science,2010,25(6):1199-1205.(in Chinese)
[6]LI J,LIAO G,GRIFFITHS H.Bistatic MIMO radar space-time adaptive processing[C]//2011IEEE International Radar Conference.Kansas,Missouri,May 2011:498-502.
[7]WU X H,KISHK A A,GLISSON A W.MIMOOFDM radar for direction estimation[J].IET Radar,Sonar & Navigation,2010,4(1):28-36.
[8]LI J,STOICA P,XU L,et al.On parameter identifiability of MIMO radar[J].IEEE Signal Process Lett,2007,14(12):968-971.
[9]LI J,LIAO G,MA K,et al.Waveform decorrelation for multitarget localization in bistatic MIMO radar systems[C]//2010IEEE International Radar Conference.Washington,May 2010:21-24.
[10]李树峰,张履谦,陈 杰,等.基于完全互补序列的正交MIMO雷达二维DOA估计[J].电波科学学报,2010,25(4):617-624.LI Shufeng,ZHANG Lvqian,CHEN Jie,et al.Two-di-mensional DOA estimation for orthogonal MIMO radar based on complete complementary sequence[J].Chinese Journal of Radio Science,2010,25(4):617-624.(in Chinese)
[11]CHEN Jinli,GU Hong,SU Weimin.Angle estimation using ESPRIT without pairing in MIMO radar[J].Electron Lett,2008,44(24):1422-1423.
[12]YAN H,LI J,LIAO G.Multitarget identification and localization using bistatic MIMO radar systems[J]. EUR-ASIP J Adv Signal Process,2008:283483.
[13]GAO X,ZHANG X,FENG G,et al.On the MUSIC-de-rived approaches of angle estimation for bistatic MIMO radar[C]//International Conference on Wireless Net-works and Information Systems.Shanghai,28-29December,2009:343-346.
[14]ZHANG X,XU Z,XU L,et al.Trilinear decompositionbased transmit angle and receive angle estimation for multiple-input multiple-output radar[J].IET Radar,Sonar & Navigation,2011,5(6):626-631.
[15]NION D,SIDIROPOULOS N D.Adaptive algorithms to track the PARAFAC decomposition of a third-order tensor[J].IEEE Transaction on Signal Process,2009,57(6):2299-2310.
[16]郑志东,牛朝阳,张剑云.单快拍数下双基地MIMO雷达的角度估计[J].信号处理,2010,26(5):789-794.ZHENG Zhidong,NIU Zhaoyang,ZHANG Jianyun.Receiver and transmitter angle estimation for bistatic MIMO Radar with single snapshot[J].Signal Processing,2010,26(5):789-794.(in Chinese)
[17]STOICA P,NEHORAI A.Performance study of condi-tional and unconditional direction-of-arrival estimation[J].IEEE Trans Signal Process,1990,38(10):1783-1795.
[18]曾建奎,何子述.慢起伏目标的多输入多输出雷达监测性能分析[J].电波科学学报,2008,23(1):158-162.ZENG Jiankui,HE Zishu.Analysis of MIMO detection performance for slow fluctuating target[J].Chinese Journal of Radio Science,2008,23(1):158-162.(in Chinese)
