双基地高频地波雷达系统矢量流速探测精度分析
2012-07-25柯亨玉潘谊春
何 缓 柯亨玉 潘谊春 尤 君 程 丰
①(空军预警学院信息对抗系 武汉 430019)
②(武汉大学电子信息学院 武汉 430079)
1 引言
高频地波雷达是20世纪80年代发展起来的一种可以连续大面积监测海洋环境状态的设备。目前成功用于海态监测的高频地波雷达系统有美国的SeaSonde[1],中国的 OSMAR[2],德国的 WERA[3]等。然而,一方面,单基地雷达测量矢量流速时至少需要两部雷达系统同时工作,提取风向信息时存在模糊性等技术缺陷;另一方面,单基地雷达观测海洋的尺度有限,所获取的海洋动力学参数信息不够丰富。为提高雷达监测能力,更加全面准确地认知海洋,基于高频地波雷达非后向散射理论的组网探测成为目前高频地波雷达研究的热点问题[4-7]。利用现有的单基地高频地波雷达增设分置的接收系统,并使它们协同工作,即构成双基地T/Rm-Rb体制,既可测得矢量流速度,又可消除风向模糊性,因此,本文的研究对象为T/Rm-Rb双基地雷达系统。其中,海流探测精度分析是双基地高频地波雷达系统工程应用中不可缺少的部分。
单基地高频地波雷达的海流探测精度可通过分析海上比对验证试验数据得到[8],但目前双基地高频地波雷达仍处于试验阶段,尚无比对验证数据可用,只能从理论角度仿真分析海流探测精度。除本文作者曾分析过基于T/Rm-Rb系统矢量流速大小和方位的绝对误差外[6],尚无相关报道。因此,本文将从均方误差出发分析T/Rm-Rb双基地高频地波雷达系统矢量流探测精度,确定T/Rm-Rb系统矢量流探测的最佳工作区域。
2 系统构成
用于海态监测的双基地高频地波雷达系统工作于掠入射状态,故可将双基地雷达和目标(海元)限定在双基地平面内,即所考虑系统为2维双基地系统。如图1所示,T表示发射机,Rm, Rb表示接收机,T和Rm构成一个单基地雷达系统,T和Rb构成一个双基地雷达系统。RT和RR分别为发射机T和分置接收机 Rb到目标之间的距离,LB为双基地雷达的收发基线距离,γ为双基地角。
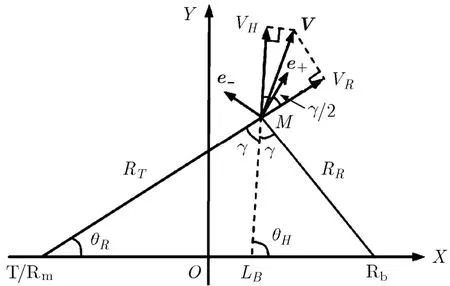
图1 T/Rm-Rb双基地雷达系统海流测量示意图
根据海洋表面的一阶散射机理,T/Rm单基地雷达可根据其一阶峰的频移测量海流径向流速VR,T-Rb双基地雷达可根据其一阶峰的频移测量海流双曲流速VH[9](VH的延长线是 ∠ T MRb的平分线[10]),二者组合可得海流矢量流速V,参见图1。图中,θR和θH分别表示径向流速与双曲流速所在方位(参考方向为图1中X轴正向)。
令单位矢量e+沿径向流速度VR与双曲流速度VH的夹角平分线方向,单位矢量e-与单位矢量e+相互正交,则e+和e-可表示为

其中eR和eH分别为平行于 T/Rm单基地雷达测得的径向流速度VR和 T-Rb双基地雷达测得的双曲流速度VH的单位矢量,由图1可见,有

假设矢量流速度V与e+之间的夹角为θ,则有

由式(3)及V=Vcose++Vsin-,可得T/Rm-Rb双基地雷达系统合成的矢量海流速度为

由 T-Rb双基地雷达测得的双曲流速度可表示为VH=VB/cosγ,VB为双基地接收机 Rb按传统多普勒速度的处理方式得到的量,即海流运动速度在接收机 Rb与海面散射单元连线上的投影分量。这样,式(4)可重写为

3 矢量流均方误差
由式(5)可写出矢量海流速度的误差为

式(6)中前两项代表由两接收机(Rm和 Rb)处所测量多普勒速度的有限分辨率引起的误差,称为 I型误差。I型误差与雷达工作频率和信号处理的相干积累时间有关。式(6)中后两项表示观察散射角(即双基地角γ)时的误差,称为II型误差。II型误差通过测量两个距离(基线距离LB和距离和Sr=RT+RR)和一个角度(发射波束的方位角θR)确定。散射角的测量精度与所测量距离和方位角的精度有关,其中基线距离LB的测量可通过 GPS系统精确到厘米量级,因此观察散射角时的误差主要由测量距离和Sr=RT+RR和方位角θR的误差确定。距离和Sr=RT+RR的测量精度主要受脉冲宽度限制,方位角θR的测量精度主要受波束宽度限制。
由式(6)可计算矢量海流速度的均方误差,为


其中

在式(8)和式(9)的推导过程中,忽略了δVR,δVB,δθR,δ两两之间的相关性。因篇幅有限,略去fij,gij的详细推导过程。
3.1 I型均方误差的分析
此处,暂时忽略II型均方误差,仅分析I型均方误差。
假设两接收机(Rm和 Rb)采用相同的信号处理器,则有

将式(10)代入式(8),则有

式(11)定义了一个与T/Rm-Rb双基地雷达系统硬件无关的几何因子。

图 2绘出了式(12)给出的几何因子随双基地角γ变化的情况,当γ=50°时取得最小值5.8285;该最小值也可由式(12)通过解析法求得,为3+2,二者是一致的。图3绘出了I型均方误差相对于其最小值归一化后的水平分布图;图中,横坐标和纵坐标相对于基线距离LB进行了归一化,T/Rm位于(-0 .5,0), Rb位于(0 .5,0),月牙形阴影区域为给出的区域,由双基地角γ分别取26°和71°时的弧线围成。
3.2 I型均方误差与II型均方误差的比较
(1)假设在某点海流速度为常数,文中设为 1 m/s;

将矢量海流速度V用其方向ev和大小V表示为V=evV,这样,多普勒速度VR和VH可表示为

I型均方误差与II型均方误差的比值可表示为

4 结束语

图2 几何因子随双基地角γ的变化

图3 归一化I型均方误差的水平分布图

图4 I型与II型均方误差之比的水平分布图
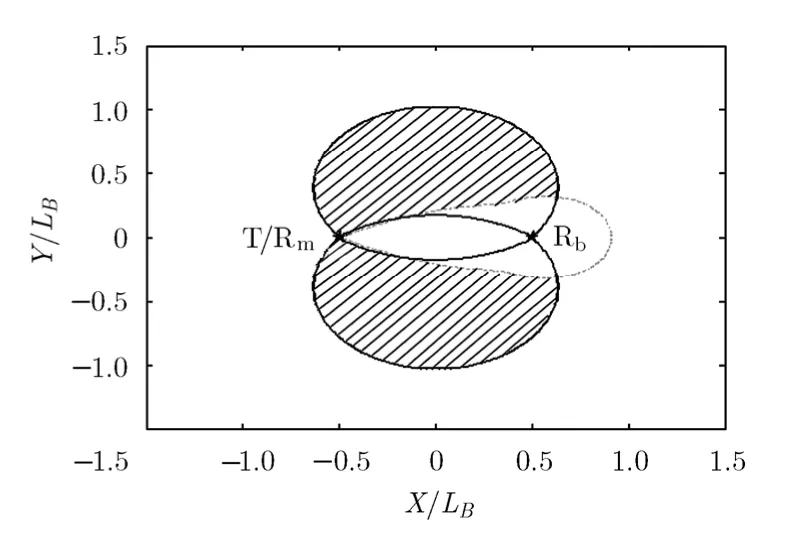
图5 T/Rm-Rb双基地雷达系统的海流测量最佳区域
随着高频地波雷达海洋环境监测技术的不断发展,尤其是表层海流探测技术的日益成熟,高频地波雷达的应用潜力及测量精度得到了海洋学者的高度关注。本文从均方误差出发分析了T/Rm-Rb双基地高频地波雷达系统矢量流速探测精度,确定了T/Rm-Rb系统进行矢量流速探测的最佳工作区域。即,T/Rm-Rb双基地雷达系统在提取矢量海流速度时,应尽量避免基线和双基地接收机 Rb附近的区域。
[1]Garfield N, Hubbard M, and Pettigrew J. Providing SeaSonde high-resolution surface currents for the America’s cup[C]. Proceedings of the IEEE/OES/CMTC Tenth Working Conference on Current Measurement Technology,Monterey, CA, 2011: 47-49.
[2]陈泽宗. 变频多功能新型高频地波雷达[J]. 中国科技成果,2011, 12(7): 12.
Chen Ze-zong. New frequency conversion multi-function high frequency ground wave radar[J].China Science and Technology Achievements, 2011, 12(7): 12.
[3]Savidge D, Amft J, Gargett A,et al.. Assessment of WERA long-range HF-radar performance from the user’s perspective[C].Proceedings of the IEEE/OES/CMTC Tenth Working Conference on Current Measurement Technology, Monterey,CA, 2011: 31-38.
[4]毛滔, 公绪华, 孟华东, 等. 岸/舰双基地地波超视距雷达抗电离层干扰研究[J]. 海军工程大学学报, 2011, 23(4): 95-99.
Mao Tao, Gong Xu-hua, Meng Hua-dong,et al.. On antiionospheric interference based on bistatic OTH radar[J].Journal of Naval University of Engineering, 2011, 23(4):95-99.
[5]何缓, 柯亨玉, 万显荣, 等. 基于双基地海洋回波谱仿真数据的海浪波数谱反演[J]. 电子与信息学报, 2011, 33(10):2477-2482.
He Huan, Ke Heng-yu, Wan Xian-rong,et al.. Inversion of wave-number spectrum from simulated bistatic high-frequency radar data[J].Journal of Electronic&Information Technology, 2011, 33(10): 2477-2482.
[6]何缓, 柯亨玉, 万显荣, 等. 双基地高频地波雷达系统布站研究[J]. 电子与信息学报, 2012, 34(2): 333-337.
He Huan, Ke Heng-yu, Wan Xian-rong,et al.. Study on the distribution of bistatic high-frequency ground wave radar system[J].Journal of Electronic&Information Technology,2012, 34(2): 333-337.
[7]仇永斌, 张宁, 李杨. 双基地高频雷达一阶海杂波多普勒频移展宽效应[J]. 系统工程与电子技术, 2010, 32(11): 2336-2340.
Chou Yong-bin, Zhang Ning, and Li Yang. Broadening effect of first-order ocean clutter Doppler shift of bistatic high-frequency ground wave radar[J].Systems Engineering and Electronics, 2010, 32(11): 2336-2340.
[8]龚子平, 柯亨玉, 侯杰昌, 等. 高频地波雷达海洋表面流测量误差分析[J]. 武汉大学学报(理学版), 2007, 53(3): 356-360.
Gong Zi-ping, Ke Heng-yu, Hou Jie-chang,et al.. Error analyze of current measurements by HF surface wave radar[J].Journal of Wuhan University(Natural Science Edition),2007, 53(3): 356-360.
[9]Barrick D E, Lilleboe P M, Lipa B J,et al.. Ocean surface current mapping with bistatic HF radar[P]. United States Patent, 2004, No. 2004/0090363 A1.
[10]Nicholas J W. Bistatic Radar [M]. NewYork City: SciTech Publishing Inc., 2005: 311-314.
[11]Yoshimasa T and Masahisa N. Error estimation of the synthesized two-dimensional horizontal velocity in a bistatic Doppler radar system[J].Journal of Atmospheric and Oceanic Technology, 2002, 19(1): 74-79.
