缆载吊机行走机构钢结构主体有限元分析
2012-07-24邓年春刘显晖伍柳毅
邓年春,罗 珊,刘显晖,伍柳毅
(1.柳州欧维姆机械股份有限公司,广西柳州545005;2.广西工学院,广西柳州545006)
1 工程及施工概况
青草背长江大桥位于重庆三环高速公路南川至涪陵段K48+657~K50+376处,全桥长1 719 m。主桥为788 m单跨连续悬索桥,成桥状态中部主缆设计垂跨比为1/10。全桥共设两根主缆,间距 28.7 m,每根主缆由 88股(每股由1275.2镀锌高强钢丝组成)预制平行钢丝索股组成。主桥加劲梁采用正交异性板流线型扁平钢箱梁,梁高3.5 m,宽(含风嘴)30.7 m;钢箱梁与吊索的连接采用销接式锚板。主桥加劲梁根据制造时划分的梁段数划分成50个吊装段,即跨中吊装段2个、标准吊装段44个、端部吊装段2个、合龙段2个。其中标准吊装段长度为16m,跨中吊装段长度16.6 m,合龙段为标准段长度16 m,端部吊装段长8.32 m。最大吊装重量为241 t(跨中吊装段)。
钢箱加劲梁的架设拟采用300 t步履式缆载吊机,其吊装模拟见图1。缆载吊机的行走机构直接与主缆接触,以主缆作为支撑,传递吊机自身重量和吊装重量,在吊机移位和定位吊装的过程中发挥重要作用。在行走过程中,缆载吊机需要跨越已安装好的主缆索夹。为了实现吊装、移位和跨越索夹的功能,滚轮、行走机构钢结构主体、牵引千斤顶、荷载转换千斤顶和液压马达等组成了行走机构的主要部分。行走机构钢结构主体为长十几米、高一米多的箱形结构,是各种机构及结构的骨架,其上安装有行走轮组、抱箍装置、工作靴装置等,其结构的安全性极其重要。本文拟采用ANSYS有限元软件,对其在各种施工工况下的受力性能进行分析,为缆载机结构设计提供依据。
2 行走机构钢结构主体有限元分析
2.1 分析模型与有限元单元选择
缆载吊机的行走工况和吊装工况不是同时进行的。在移动而未吊装时,通过四个行走轮组骑在主缆上,行走轮组最终与钢结构主体接触的面上的压强需满足设计要求;吊装时,主体下的三个工作靴骑跨在主缆上,其接触面的压强同样需要满足设计要求。行走机构钢结构主体通过销轴与主桁架相连,主桁架上的力通过销轴传给行走机构。钢结构主体为宽度方向对称的箱形结构,采用ANSYS软件分析时,建立二分之一分析模型。
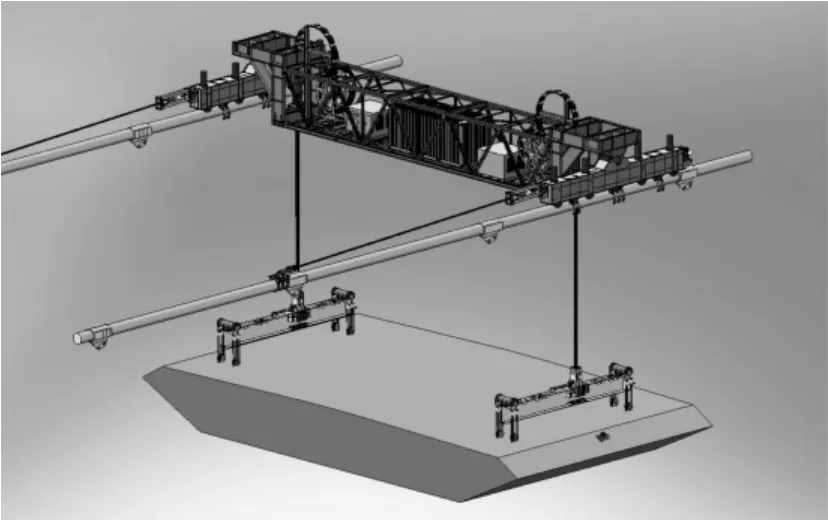
图1 缆载吊机吊装钢箱梁模拟图
钢结构主体实体模型,总长度超过11 m,高度超过1 m,箱形结构内部较复杂。ANSYS分析时,单元的选择,从分析有效性考虑,对大部分简单区域采用solid185单元,对复杂区域采用solid92单元。钢结构主体与主桁架通过销轴连接,分析过程中,采用接触单元。本模型中,将销轴的下半面和钢结构主体圆孔的下半面作面—面接触。将销轴下半面视作刚性“目标”面,用targe170单元来模拟此3-D“目标”面,将钢结构主体圆孔的下半面视作柔性“接触”面,用conta174单元模拟此“接触”面,建立一个“接触对”。
钢结构主体采用Q345钢材,其弹性模量为2.06×105MPa,泊松比为0.3,屈服强度为325 MPa;销轴采用合金结构钢40 Cr,弹性模量为2.06×105MPa,泊松比为0.3,屈服强度为785 MPa。
2.2 建模及网格划分
ANSYS中的模型应简洁,且在关键受力部位能反映出实体的真实情况,经反复试算,此钢结构主体的建模过程为:从solidworks中导入二分之一实体模型后,保留中间较复杂且受力比较大的一部分,将这部分进行布尔运算,尽量地切割出规则的六面体,以方便后续的网格划分;将左右两边模型删除,在ANSYS中采用自顶向下的建模方式自行建模,并进行适当简化,这样在建模过程中实际上也在进行布尔运算;最后使用glue操作将全部模型搭接在一起。
模型在进行了布尔运算之后就可进行网格划分,采用前述的solid185单元和solid92单元对钢结构主体划分网格,并对销轴和圆孔的下半面作面—面接触,建立一个“接触对”。钢结构主体有限元网格模型参见图2,其中 solid185单元8 954个,solid92单元10 307个,targe170单元602个,conta174单元58个,总的单元数为19 921个,总的节点数为32 949个,比单独采用solid92单元进行网格划分时大大减少。
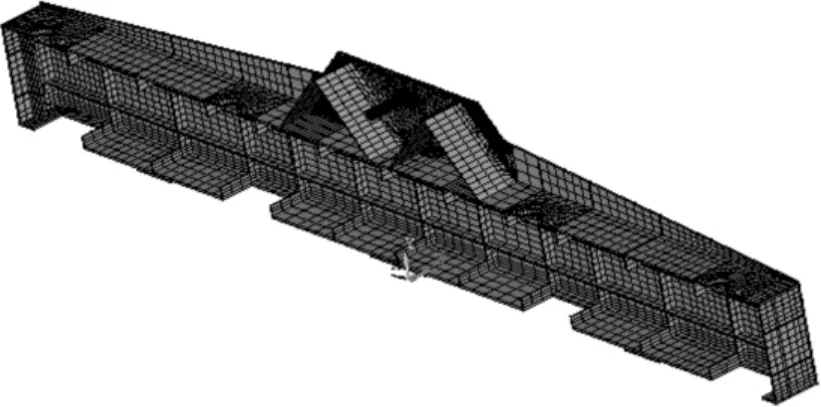
图2 行走机构钢结构主体有限元网格模型
2.3 边界条件、荷载及工况的选择
由于钢结构主体采用的是二分之一对称结构,在对称面上作对称约束,在与主缆有接触的支撑部位作全约束。
吊车行走和吊装情况下的荷载是不同的,对这两种情况下的模型施加面荷载。钢结构主体圆孔的厚度为0.07 m,销轴的直径为0.14 m。一台缆载吊机有两个行走机构钢结构主体,一个钢结构主体有两个面与销轴接触,因此共有四个面与销轴接触。行走、无负重时,只考虑行走机构自重和主桁架及附属设备自重120 t,故对受荷面所施加的均布力为30.6 MPa;固定在主缆吊装时,根据提供的缆载吊机设计要求,取额定起重量为330 t,故对受荷面所施加的均布力为84.2 MPa。
不同施工工况下的支座约束不同。缆载吊机在主缆行走、无负重时,考虑两类工况进行计算。一类是缆载吊机处于水平位置,另一类是处于主缆倾斜30°的位置。当缆载吊机在主缆水平位置行走时,四个行走轮组编号参见图3。缆载吊机在行走过程中,当行走轮①跨越主缆索夹时,①不再与主缆接触,此时只有行走轮②、③、④与主缆接触;由于主缆的弯曲,此时行走轮③可能不在主缆上,只有②、④与主缆接触;当行走轮②跨越索夹时,①已经重新与主缆接触,②脱离主缆,此时只有行走轮①、③、④在主缆上;由于主缆弯曲,没有呈一条直线,行走轮③可能脱离主缆,只有①、④与主缆接触;缆载吊机在主缆倾斜30°位置无负重行走时的工况与其在主缆水平位置行走时相同。
缆载吊机固定在主缆进行吊装作业时,考虑两类工况进行计算。一类是缆载吊机处于水平位置,另一类是处于主缆倾斜30°的位置。缆载吊机固定在主缆水平位置作业时,底部3个工作靴的编号参见图3,此时,行走机构钢结构主体底部三个接触面⑤、⑥、⑦与主缆接触;考虑主缆的变形,中间的面⑥可能不与主缆接触,此时只考虑⑤、⑦的接触。缆载吊机固定在主缆30°位置倾斜作业时的工况与其在主缆水平位置时相同。
综上所述,行走机构钢结构主体需考虑12种不同施工工况进行模拟分析。
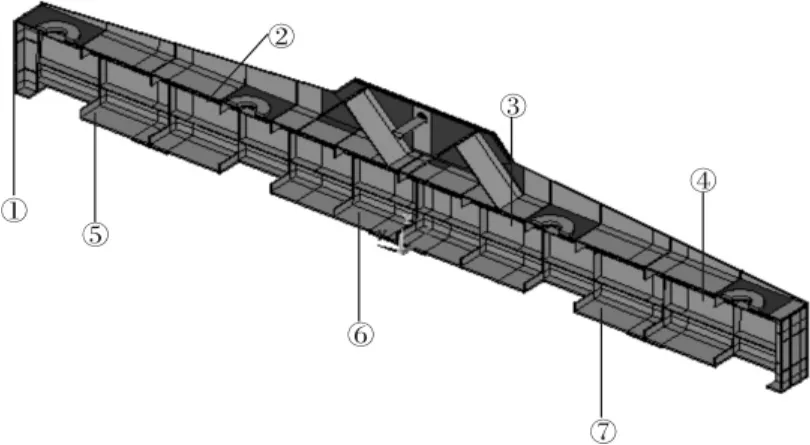
图3 行走机构钢结构主体支撑面编号
2.4 不同荷载工况下的有限元计算结果及分析
前述的准备工作过后,ANSYS在计算阶段所需的时间大为减少。当仅采用solid92单元进行网格划分时,将产生100 000个左右的单元,每种工况下的计算时间超过了2 h,而采用本文所述的solid185单元和solid92单元时,网格划分完毕后产生的单元总数大为减少,每种工况下的计算时间只需10~20 min,因此节省了大量时间,提高了工作效率,保证了工作进度。
从ANSYS有限元静力计算结果可以得到,缆载吊机在主缆行走、无负重时,行走机构钢结构主体最大应力出现的区域均为支撑面附近;缆载吊机固定在主缆作业时,其最大应力出现在销轴附近或耳板截面未平顺过渡的区域。对模型进行反复设计修改和有限元模拟分析后,得出的分析结果中都未出现应力集中现象。具体的计算结果参见表1、表2。
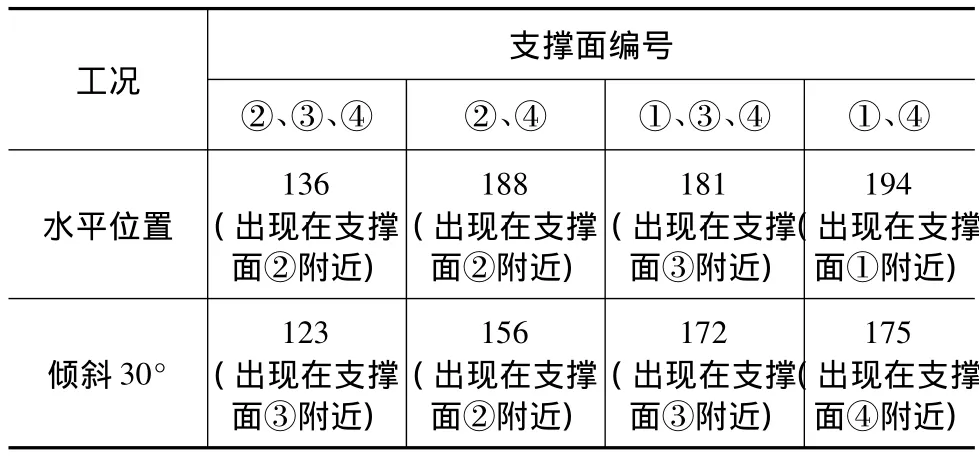
表1 行走、无负重时各工况下行走机构钢结构主体的最大应力(单位:MPa)
表2 负重时各工况下行走机构钢结构主体的最大应力(单位:MPa)
根据《起重机设计规范》(GB/T 3811-2008)的规定,缆载吊机在无风工作情况下的强度安全系数为1.48,分析行走机构钢结构主体部分时,其许用应力[σ]=325/1.48=220 MPa。从表1、表2的结果可以看出,各工况下的最大应力(von Mises Stress)都未超过许用应力,行走机构钢结构主体的强度满足规范要求。
图4 行走、无负重时的最不利工况下最不利位置等值线
图5 负重时的最不利工况下最不利位置等值线
从表1、表2的数据还可以看出,缆载吊机在主缆行走、无负重时钢结构主体的最不利工况为在水平位置、只有行走轮①、④与主缆接触;其固定在主缆作业时的最不利工况为在水平位置、只有⑤、⑦两面与主缆接触。这两种最不利工况下最不利位置的应力等值线图分别参见图4、图5。
3 结束语
本文采用solid185单元和solid92单元对300 t步履式行走机构钢结构主体进行有限元分析,比采用单一的solid185单元或solid92单元的分析,在保证计算精度的情况下,计算效率更高。通过在不同施工工况下的有限元分析可知,主体结构满足规范要求,且经过不断设计改进之后,有限元分析结果中未出现应力集中现象。但同时也应该看到,部分区域的应力较大,造成这种原因的结果有两个,一是在ANSYS中建模简化模型时,削弱了承载能力,从这点看,算出的最大应力实际上是偏大的;二是少部分区域的设计没有平滑过渡。解决了这两个问题,钢结构主体的设计将更加经济、合理。
[1]宋大炜,杨永清.JQ 900架桥机局部应力的有限元分析[J].工程结构,2004,24(6)
[2]袁昕.DF 50/160架桥机主梁设计及有限元分析研究[J].机电产品开发与创新,2008,21(6)
[3]姚玲森.桥梁工程[M].北京:人民交通出版社,2000
[4]丁智.基于有线单元法的架桥机关键技术研究[D].长安大学,2004
[5]林刚,王小洋,武江勇,等.缆载吊机主桁架的强度及稳定性分析[J].计算机应用技术,2011,38(3)
