汽车防抱死制动系统H∞控制与P ID控制的比较研究
2012-07-19严运兵荣锐兵蔡啸霄
吴 浩,严运兵,方 圆,荣锐兵,蔡啸霄
(武汉科技大学 汽车与交通工程学院,武汉 430081)
汽车在紧急制动过程极易出现很多危险的现象,例如侧滑、跑偏、失去转向操纵能力等,进而导致了相当多的交通事故。这些危险的现象都是由于汽车制动时车轮抱死产生的,因而考虑汽车制动安全性而研制出来的汽车防抱死制动系统就具有重要的作用。汽车防抱死制动系统 (简称ABS,即Antilock Braking System)是一种主动安全装置,能够防止汽车在制动时车轮完全抱死,从而起到缩短制动距离、增强车辆稳定性和转向操纵性的作用。
如图1所示为汽车ABS系统的工作原理。汽车防抱死制动系统通常由传感器、电控单元(ECU)和执行器(液压调节器)三部分组成。车辆制动时,电控单元接收来自传感器的车速和轮速信号,经过运算和处理后向执行器(液压调节器)发送控制信号,然后执行器会通过调节制动器液压来实现车轮制动力的动态调节,进而实现防止车轮抱死的功能。
控制方法是ABS的核心技术,掌握控制方法的设计和匹配,对于自主开发ABS和进一步开展汽车主动安全性理论和技术研究有着重要的现实意义[1]。目前,国内外对ABS的控制方法进行了很多研究,其中在实际中应用的较为广泛是逻辑门限控制,它对于非线性系统是一种有效的控制方法,但是在选择门限值、车速估计及路面识别上存在困难[1]。也有采用 PID、模糊、滑模变结构等控制方法的[3-5],但一般都通过单一的控制方式来实现,因此往往很难兼顾控制的鲁棒性、精度和稳定性。对于ABS这样一种非线性和参数不确定性的系统,必须要考虑控制器的鲁棒性能。因此本文在建立防抱死制动系统数学模型的基础上,设计了 H∞控制算法,并与基于传统PID控制的ABS系统进行比较研究。
1 ABS数学模型
本文以单轮车辆系统模型为研究对象,为了便于分析,在研究汽车制动防抱死系统时作了如下简化:(1)车轮承受的载荷为常数;(2)忽略空气阻力和滚动阻力的影响。
汽车防抱死制动系统的数学模型由车辆动力学模型、轮胎模型、制动系统模型、滑移率计算模型和控制器模型5部分组成。其中,控制器模型是依据其他4个模型进行设计的。
1.1 车辆动力学模型
本文对车辆动力学模型进行了简化,采用的车轮动力学模型为单轮车辆模型。因为此模型描述的是制动性能,适合于汽车防抱死制动系统性能的分析。车辆受力分析如图2所示。
由图2可得车辆动力学方程:车辆运动方程:
车轮运动方程:
车辆纵向摩擦力:
式中:M为1/4车辆的质量,kg;v为车辆行驶速度,m/s;F 为纵向摩擦力,N;I为车轮的转动惯量,kg·m2;w为车轮角速度,rad/s;R 为车轮行驶半径,m;Tb为制动器制动力矩,N·m;μ为纵向附着系数;N为地面支持力,N。
1.2 轮胎模型
轮胎模型是指制动过程中轮胎附着力和其它各种参数之间的函数关系式,通常用轮胎附着系数与各种参数的函数关系式来表示。本文采用比较常用且相对精确的魔术公式来描述轮胎模型[5]。用魔术公式模型来模拟制动时车轮纵向附着系数和车轮滑移率之间的关系为:
式中:μ为纵向附着系数;f相当于车轮在纯滚动时附着系数,一般情况下设为0;D、C、B、E都是与路面有关的常数,通过改变这些参数可模拟不同路面的附着系数。本研究拟进行干沥青路面上的ABS系统的仿真,选取的相关常数为:D=0.85;C=2.4;B=6.0;E=0.9。
1.3 制动系统模型
制动器模型指制动器力矩与制动系气液压力之间的关系模型。为了便于对控制过程的仿真研究,在进行仿真时假设制动器为理想元件,认为其非线性特性较弱并忽略了其滞后带来的影响。因此,制动器方程为:
1.4 滑移率计算模型
汽车制动时,如果车轮线速度wR低于汽车行驶速度v时,轮胎和路面之间将产生滑移,此时滑移的程度常用滑移率表示,其计算公式为:
2 H∞鲁棒控制设计
ABS系统在实际使用时,往往会因为外界的扰动,如汽车质量会因载重量的不同而发生变化,制动器因磨损会使得制动效能下降,轮胎气压以及路面条件等因素也经常发生变化,从而使得被控系统存在不确定性。这就需要在考虑不确定性的基础上,设计出能在一定程度上抑制扰动的鲁棒控制器。
2.1 ABS数学模型简化
借鉴文献[2]的模型简化方法,对ABS系统数学模型进行简化,得到系统状态方程为:
输出方程为:
本研究采用的汽车模型基本参数为:设期望滑移率为0.2;制动初始车速为20 m/s;车轮滚动半径R为0.287 m;单轮汽车质量M为725 kg;车轮转动惯量 I为 0.405 kg·m2; 制动器效能因数 Kt为 500;重力加速度g为10 m/s2;时间常数Tp为0.5。代入仿真参数,并将式(7)、(8)转换成传递函数形式,得系统的传递函数:
2.2 基于混合灵敏度的H∞控制设计
H∞鲁棒控制理论是在H∞空间(即Hardy空间)通过某些性能指标的无穷范数优化而获得具有鲁棒性能的控制器的一种理论[7]。混合灵敏度问题是H∞控制的最典型问题之一,应用H∞方法设计系统,为了保证鲁棒性和提高系统性能,通常将设计问题转化为混合灵敏度问题。H∞混合灵敏度控制就是指在频域内选择加权函数 W1、W2、W3,使之满足:
式中:S和T分别为灵敏度函数和补灵敏度函数。
根据ABS系统的标称模型(式9),进行加权函数的选择[8-9],并使用 Matlab 中的鲁棒工具箱进行仿真实践,最后选取的加权函数为:W1(s)=100/(s+1);W2=0.00005; W3(s)=s/(s+1000)。 在 MATLAB环境下,对ABS系统的标称模型进行加权,并使用hinf命令求解H∞控制器,结果为一个四阶模型[10-11]:
3 ABS系统动态仿真和结果比较分析
为达到最佳制动效果,一般希望制动过程中滑移率稳定在 0.2附近[12]。 以此为控制目标,在Matlab/Simulink平台上搭建ABS系统仿真模型,并分别基于H∞控制和PID进行动态仿真,得到单轮车辆模型在干沥青路面上的ABS系统动态仿真响应过程。图3为ABS系统的Simulink仿真模型。
图4和图5分别给出了采用H∞控制器和PID控制器时,车速、轮速和制动距离的变化曲线。可以看出,无论是PID控制还是H∞控制,ABS系统均能使车速和轮速不断减小,最后同时减为0,表明当汽车制动停止时车轮才抱死,控制效果都比较好。而且,制动时间和制动距离也比较接近,说明两种控制方式所获得的汽车制动性能较为接近,都能使汽车获得较好的制动性能和操纵稳定性。
图6和图7分别给出了在改变系统参数 (汽车载重量和制动器效能因数)时,基于PID控制器和H∞控制器的滑移率变化曲线。从控制系统的快速性角度来看,基于PID控制的滑移率曲线大约需要0.5 s的调节时间才能达到期望值,而基于H∞控制的滑移率曲线从0 s开始就达到了期望值,说明与PID控制相比,H∞控制响应更为迅速;从控制系统的鲁棒性角度来看,当使汽车质量M从725 kg增加至1 000 kg或使制动器效能因数Kt从500增加至1 000时,滑移率曲线变化均比较小,基本上都能保持在期望滑移率0.2附近,说明两种控制方法都能抵抗一定的参数不确定性,鲁棒性能都比较好;从控制系统的稳定性角度来看,基于PID控制的滑移率曲线在制动过程末端出现了一定的波动,而基于H∞控制的滑移率曲线从始至终一直比较稳定,说明H∞控制比PID控制稳定性更好。
表1给出了两种控制算法的性能对比分析,通过比较发现,相对于传统的PID控制而言,H∞控制能明显缩短ABS工作的调节时间,且具有更加优秀的稳定性,两者都能使ABS系统具备抵抗系统不确定性的能力,即具有较好的鲁棒性能,H∞控制唯一不足的是存在一定的稳态误差。因此,总体而言H∞控制的控制效果优于PID控制。
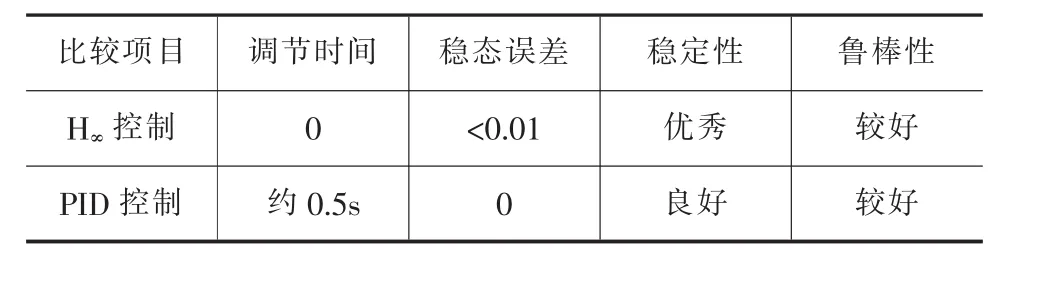
表1 两种控制算法各项性能对比分析
4 结束语
相对于传统PID控制的ABS系统而言,本文设计的基于H∞控制的ABS系统能使车轮滑移率有效的控制在期望值附近,且响应迅速、具有较好的鲁棒性和稳定性,整体的控制效果优于PID控制,因此可以为实际的ABS控制系统开发提供理论借鉴。本文只是在单轮模型的基础上研究,还不能很好的反映整车的情况;为了得到系统数学模型,本文进行了一些简化 (如忽略液压系统的滞后),这与实际的ABS系统也有一定差别,因此在本研究的基础上可以建立更为准确的ABS系统模型(如两轮模型或四轮模型),以得到更加合理的仿真结果。
[1]宋健,李永.汽车防抱死制动系统控制方法的研究进展[J].公路交通科技,2002,19(6):140-145.
[2]张显库.汽车防抱死制动系统的鲁棒控制[J].重庆工学院学报(自然科学版),2008,22(7):1-5.
[3]程军.汽车防抱死制动系统的理论与实践[M].北京;北京理工大学出版社,1999.
[4]陈炯,王会义,宋健.基于滑移率和减速度的ABS模糊控制仿真研究[J].汽车工程,2006,28(2);148-151.
[5]Pacejka,H.B.and Bakker.E.The Magic Formula Tyre Model.In Pro.1st International Colloquium on Tyre Models for Vehicle Dynamics Analysis,Deft,Netherlands,1991.
[6]冷雪,李文娟,王旭东,等.汽车防抱死制动系统三种控制算法制动性能比较 [J].自动化技术与应用,2009,28(2):74-77,89.
[7]梅生伟,申铁龙,刘康志.现代鲁棒控制理论与应用(第二版)[M].北京:清华大学出版社,2008.
[8]吴旭东,解学书.H∞鲁棒控制中加权阵选择[J].清华大学学报(自然科学版),1997,37(1):27-30.
[9]赵慧,姜洪洲,韩俊伟,等.H∞混合灵敏度控制在液压伺服系统中的应用 [J].中国机械工程,2002 (2),13(3):195-197.
[10]薛定宇.控制系统计算机辅助设计:MATLAB语言与应用[M].北京:清华大学出版社,2006.
[11]D.-W.Gu,P.Hr.Petkov and M.M.Konstantinov.Robust Control Design with MATLAB [M].Springer,1st Edition,2005.
[12]余志生.汽车理论 (第五版)[M].北京:机械工业出版社,2009.