单斜热丝测量三维速度场算法研究
2012-07-14陈洪敏吉建波
钟 明,陈洪敏,熊 兵,田 伟,吉建波
(1.中国燃气涡轮研究院,四川江油621703;2.柴油机高增压技术国防科技重点试验室,山西大同037036)
1 引言
随着对各种流动现象研究的深入,对流动测量技术的要求也越来越高。三维速度场测量已发展了热线、LDV、PIV等多项技术,这些技术原理各异、性能有别,适用范围不一,其中热线技术因其测试系统简单、频率响应宽、测量精度高等优点而得到广泛应用[1]。热线技术测量三维速度场时,可用三丝探头或单斜热丝探头。但三丝探头有六根支杆,所占体积较大,很难分辨小尺度空间的强剪切流,且探头对流场干扰较大,校准复杂,维修费用高。单斜热丝探头因对流场干扰较小、空间分辨率较高、使用方便,在实际应用中得到更多重视[2],但存在校准困难,数据处理复杂、耗时长等。单斜热丝测量技术的测量精度和范围,取决于能否有效地反映单斜热丝对气流速度(大小和方向)的敏感性。本文根据经验关系式,提出以改进的粒子群优化算法(PSO)求解实际测量流场数据,并通过试验验证算法的有效性。
2 三维速度场的单斜热丝测量方法
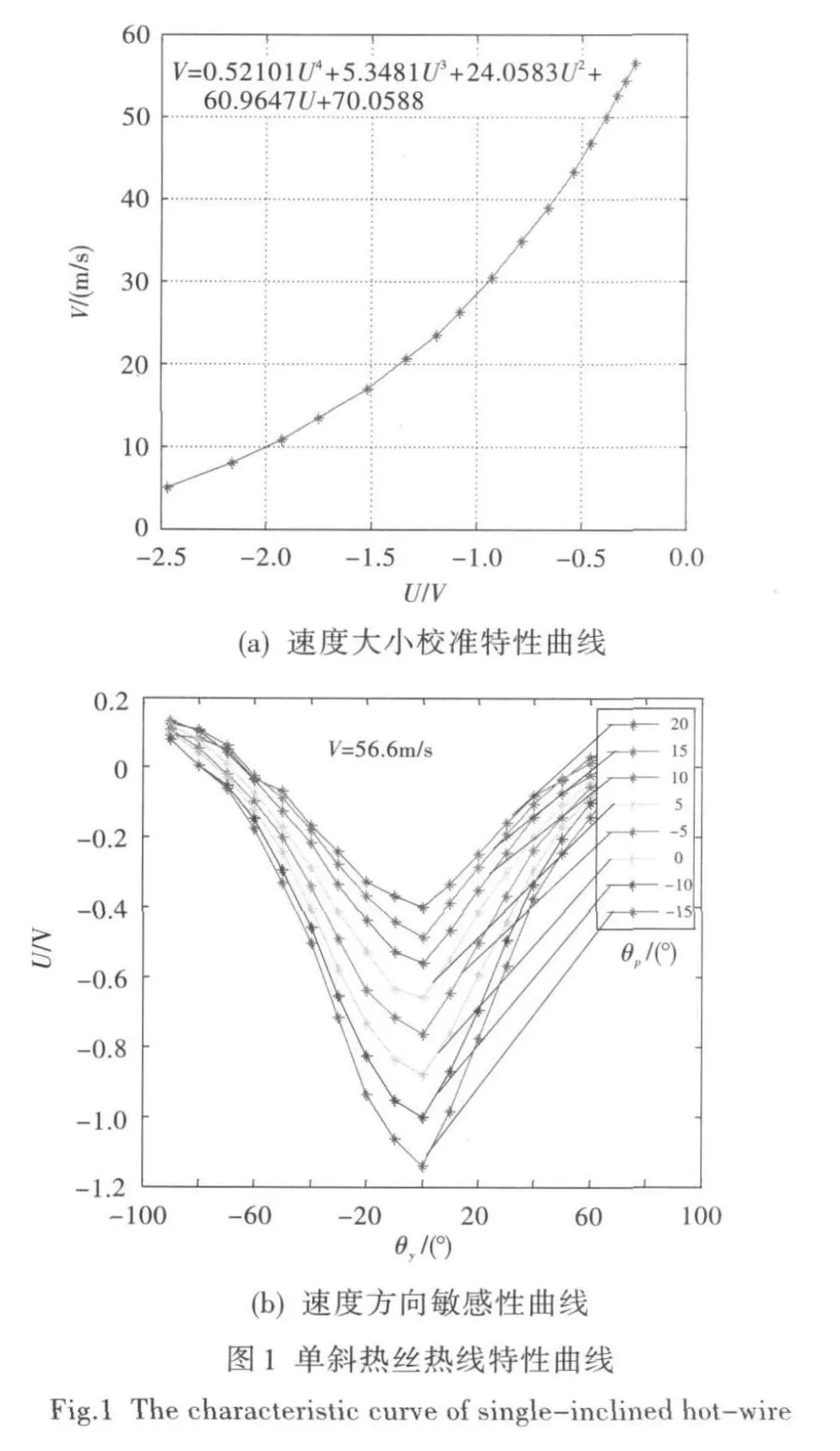
用单斜热丝测量三维流场是基于热丝的方向敏感性。当气流不垂直于热丝时,热丝所感受的冷却速度(有效速度)为气流速度和方向的函数,其关系如图1所示。图中,V为冷却速度,U为输出电压,θy为偏转角,θp为俯仰角。
针对单斜热丝对气流速度的敏感性,本文采用下列经验关系式表示:
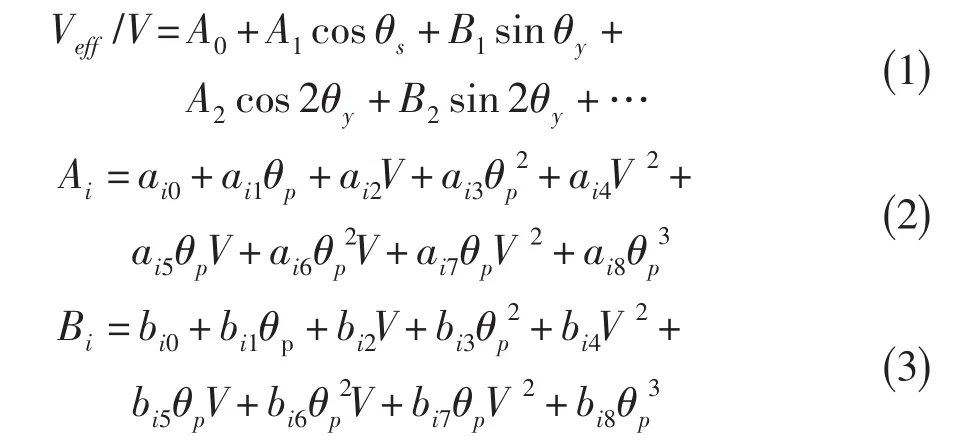
式中:Veff为有效速度,θs为单斜热丝倾角,三角函数的阶数一般取3~4阶,系数aij和bij由最小二乘法拟合校准数据确定。由于热丝的方向敏感性对θy=0°不对称,通常把校准角度分为对称的两组,-90°≤θy≤0°和0°≤θy≤90°,分别对这两组偏转角用最小二乘法拟合出上式中的校准系数。实际测量中要得到三维速度值,需将单斜热丝放置在不同角度位置,当热丝绕自身轴线旋转时,仅气流对探针的偏转角改变,俯仰角不变。如果探针只旋转三个位置进行测量,理论上可求解方程组,但由于校准曲线由最小二乘法拟合得到,求解误差较大[4]。当气流俯仰角变化范围较宽时,增加探针角向测量位置,可有效提高测量精度,一般选取5~7个测试点,可表示为:

用上式对各种测试数据进行拟合,构成一个非线性最小二乘问题,即确定目标函数使上式理论值与实际值误差最小的解(V ,θp,θy)。对此,文献[4]提出用最小二乘算法求解,文献[5]提出用非线性最优化的L-M算法进行数据处理。虽然这两种算法求解速度快,但都要求拟合函数能方便地分解为矩阵形式,公式(1)~(3)求解函数复杂,很难分解为矩阵形式,因此这两种算法求解困难。另外,由于实际测量时速度主流方向的不确定性,热丝旋转的不同角度数据如果根据角度偏转正负带入公式计算,必然引入热丝方向敏感性不对称误差,使得前面分组校准失去意义。角度的不确定性如图2所示。
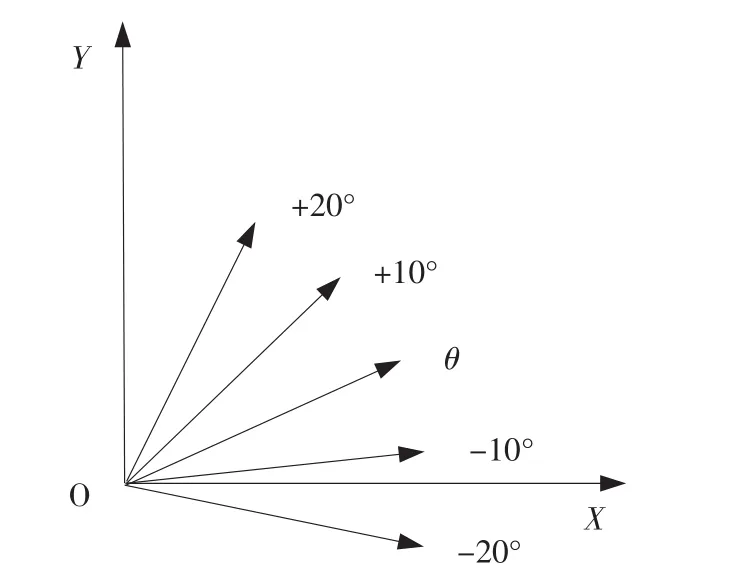
图2 偏转角度的不确定性Fig.2 The uncertain characteristic of pitch angle
针对以上问题,本文利用改进的粒子群优化算法求解上述非线性最小二乘问题,不需对公式进行矩阵分解,且有效解决了起始角度(零位)不确定性问题(热线零位指气流主流方向),避免了实际测量计算时引入方向不对称性误差,提高了测量精度。
3 粒子群优化算法流程
粒子群优化算法是一种智能优化算法[6],一旦确定了其微粒子和适应度函数,则函数优化问题的计算步骤可总结为:
(1)随机初始化粒子群的位置和速度,其位置和速度应在限制范围内。
(2)执行粒子群算法。粒子在迭代时,根据经典粒子群算法迭代方程更新自己的速度和位置,惯性权重系数ω按下式更新:

式中:fvag、fmin分别为适应度函数的平均值和最小值,ωmax、ωmin分别为惯性权重的最大值和最小值,fitness(i)为个体的适应度函数。
(3)计算粒子个体的适应度函数。如果粒子适应度优于个体极值的适应度,则更新个体极值Pb;如果有个体适应度值优于全局极值的适应度,则更新全局极值Pg。
(4)粒子个体采用变异因子进行变异,计算变异后个体的适应度并更新个体极值和全局极值。
(5)判断适应度值是否满足精度或是否达到最大迭代数,如满足要求则结束并输出结果,否则返回步骤(2)继续迭代。
4 验证试验分析
为掌握单斜热丝测三维流场的技术,验证算法的有效性,通过热线风速仪对压气机转子出口流场的测试,研究不同状态下压气机转子出口的三维流动结构,并分析算法的性能。测量站布置在转子出口测量截面距叶尖尾缘约15.0%弦长处,叶根到叶尖共分25站测量,近叶根6站和近叶尖6站,站间径向间距为2.5%叶高(5 mm),叶中测量13站,站间距为5.0%叶高(10 mm)。记录单斜热丝探针旋转7个角度的数据。定义适应度函数为7组测量数据经验公式计算值Vi与粒子速度值Vi′误差的累积平方和:

粒子群随机产生的初始偏转角即为探针旋转的初始角度θ,记录的7组数据分别对应为θ+30°,θ+20°,θ+10°,θ,θ-10°,θ-20°,θ-30°的有效冷却速度(±代表热线探针相对初始位置的左右旋转),公式计算值Vi根据偏转角(θ±Δθ)的正负将相应的校准系数代入经验公式计算得出。相对坐标系下部分试验结果如表1所示。
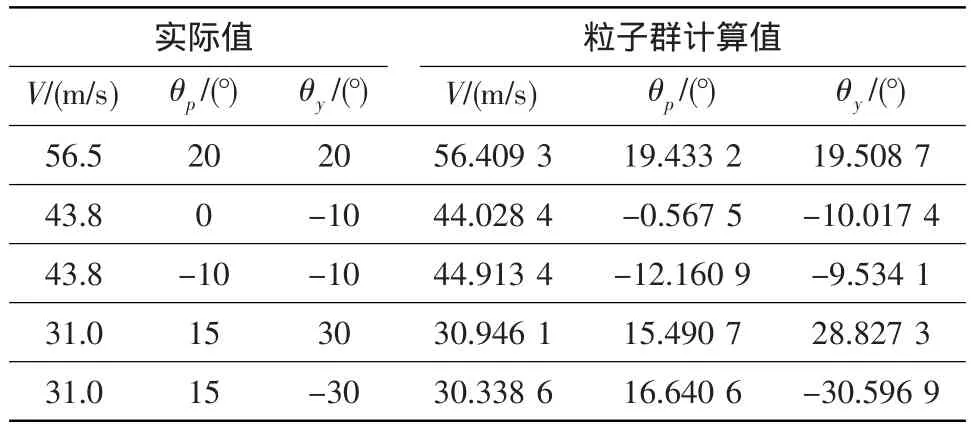
表1 粒子群算法计算结果Table 1 The calculation results ofparticle swarm optimization
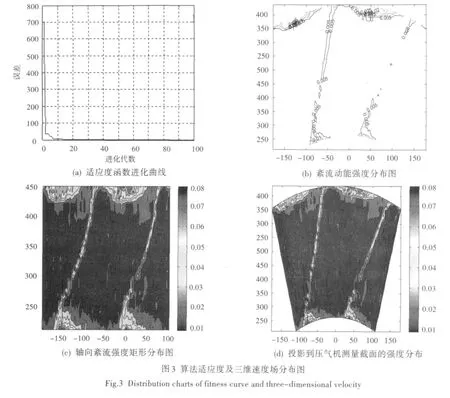
图3为算法适应度及压气机转子出口三维速度场分布图。由图3(a)中可知,粒子群算法适应度能很快进化到最优。单斜热丝校准数据对该算法的校准结果(表1)也表明,算法搜索结果收敛精度较高,速度误差在1.5 m/s内,角度误差在±2°内,证明采用粒子群优化算法能有效克服试验中单斜热丝热线旋转带来的角度不确定性影响,避免了由热线方向敏感性带来的方向误差。图3(b)是压气机测量截面的紊流动能分布图,图3(c)是轴向紊流强度的矩形分布图,通过图像投影算法将热线测量速度数据在压气机测量截面重建(图3(d)),可直观看出压气机截面速度场分布,清晰了解沿叶高速度场的变化规律。
5 结束语
单斜热丝测量三维速度场主要利用热丝对气流速度的敏感性,其测量精度取决于算法能否在较大速度和角度范围内准确有效地反映有效速度与气流大小和方向的关系。本文根据某单丝热线的速度、方向敏感性经验关系式,在分析最小二乘、L-M算法不足的基础上,采用粒子群优化算法求解测量数据,有效解决了热线旋转角度不确定性问题,避免实际计算时重新引入热线方向性误差,试验结果表明该算法有较好的精度。同时,采用图像重建技术将数据转化为速度场分布图,可清晰直观地呈现出压气机出口截面的流场分布。但粒子群优化算法收敛时间比最小二乘法长,因此在大量数据的处理中时间复杂度高、耗时长,不适合试验数据的在线分析。如何分析参数设置对粒子群算法的影响,及进一步提高算法精度和减小时间复杂度,需做进一步研究。
[1]邓康耀,顾宏中,邬静川.应用热线风速仪测试二维周期性非定常流动[J].流体力学试验与测量,1998,12(2):80—83.
[2]盛森芝,徐月亭,袁辉靖.热线热膜流速计[M].北京:中国科学技术出版社,2003.
[3]马宏伟,蒋浩康.单转子压气机设计状态和近失速状态出口三维紊流流场[J].工程热物理学报,1997,18(2):153—158.
[4]李雨村,蒋浩康.单斜热丝测量叶轮机内三维流动[J].航空动力学报,1989,4(2):145—149.
[5]郭恩民,李志刚.叶轮机械中三维周期性非定常流场测量[J].航空动力学报,1998,13(3):241—244.
[6]邹 毅,朱晓萍,王秀平.一种混沌粒子群混合算法研究[J].沈阳工程学院学报,2009,5(3):258—260.
