一种改进的混合高斯模型运动目标检测算法
2012-06-29任克强余启明罗会兰
任克强,余启明,罗会兰
(江西理工大学信息工程学院,江西 赣州 341000)
责任编辑:魏雨博
运动目标检测是计算机视觉领域中的一个重要内容,其检测效果将会对目标跟踪与识别造成一定的影响[1]。目前较为常用的运动目标检测方法有光流法[2]、帧间差分法[3]和背景减法[4]。目前,常见的背景建模方法有均值滤波、线性预测、W4方法、高斯模型法[5-6]及核密度估计法[7]等。
Stauffer和 Grimson[5]提出的混合高斯建模(Gaussian Mixture Model,GMM)是在户外运动目标检测中应用较多的背景建模方法。刘鑫等[8]将GMM与帧间差分相结合来更新高斯模型的学习速率,增强混合高斯模型处理运动干扰和多层背景的能力。马义德等[9]提出均值与方差采用不同的学习率,其中均值更新采用自适应的学习速率,方差的学习率取固定值的方法,以解决GMM方法中均值和方差自适应性慢等缺点,但对背景更新过慢造成的“拖影”问题处理并不理想。本文对GMM方法进行了改进,将背景建模分为背景初始和背景稳固两个阶段,分别采用不同的自适应策略来更新学习速率,并在HSV空间进行阴影检测和抑制。
1 混合高斯模型
混合高斯模型使用K个高斯模型来表征图像中各个像素点的特征,在获得一帧新的图像后,更新混合高斯模型,采用匹配的方法来判断某像素点是否是背景点。混合高斯模型进行运动目标检测主要包括以下几个步骤:背景建模、参数更新、背景模型的生成以及运动目标的提取。
1.1 背景建模
对视频图像中的每一个像素,用K个高斯模型表示某一像素点在某个时间的状态,假设Xt为t时刻的像素点,则其概率函数为

式中:K为混合高斯模型的个数,一般取3~5;wi,t为第i个高斯模型在 t时刻的权值; η(Xt,ui,t,Σi,t)为概率密度函数;ui,t为 t时刻第 i个高斯模型的均值向量; Σi,t为模型的协方差矩阵,i=1,2,…,K。
1.2 参数更新
将当前帧各点的像素值I(x,y)与K个高斯分布进行匹配,若满足式(3),则I(x,y)与高斯分布匹配,否则为不匹配。

式中:D为置信参数,一般取2.5;ui,t-1为第i个高斯分布在t-1时刻的均值;σi,t-1为第i个高斯分布在t-1时刻的标准差。
1)如果匹配成功,则对与之相匹配的高斯分布的参数进行更新
式中: α 为学习速率,取 0.005; ρ= α × η(Xt,ui,t,Σi,t) 。
2)如果匹配不成功,则建立一个新的高斯模型,同时去掉最不可能是背景模型的高斯分布。其他高斯分布均值和方差不变,但权值按式(7)更新

1.3 背景模型的生成及运动目标的提取
每个像素建立混合高斯模型时,只有一个或者几个高斯分布代表背景,其他的代表前景。由于背景出现的时间一般较长,权重较大,所以高斯混合模型中代表背景的高斯分布是那些权重较大的分布。因此,选择代表背景模型的高斯分布时,先将高斯分布按w/μ的值降序排列,最有可能成为高斯背景的排列在前,然后取前B个分布作为高斯分布的背景模型

式中:T是一个全局的先验概率,它表示出现在像素范围内属于背景像素的概率。
在实际应用中,T的值需要预先设定。如果T取值过小,则背景模型就变成单模态,这时仅仅使用了最有可能的单个高斯分布作为背景。随着T取值增大,背景模型会包含更多的高斯分布,产生一种透明的效果,允许背景模型接受两个或两个以上的色彩值,但是随着高斯分布数量的增加,计算量剧增,故T的取值不能过大,一般取0.8。
选取B个高斯模型后,将当前帧的像素值I(x,y)与已经选取的背景分别进行匹配。如果I(x,y)与背景模型不匹配,则判定此像素点为前景点(即运动目标),否则为背景点。
2 算法改进
传统混合高斯模型在初始化过程中,由于背景建模初期的数据很少,会导致一些非背景模型像素的权重过大,从而不能很好地反应像素的真实分布;背景形成以后,由于学习速率较小,某些像素一旦被判为背景需要很长时间才能从背景中脱离现来;如果目标运动较慢,还会出现“拖影”,影响运动目标的检测。因此,本文采用动态更新学习速率的方法来生成背景模型,从而削减“拖影”,并利用HSV色彩空间中阴影的色彩和亮度比背景暗,饱和度几乎一样这一特性来消除阴影。
2.1 学习速率的改进
学习速率α的选取十分重要,α取值过小,适应环境的变化需要较长时间,这样会把某些已经不是前景的物体误判成运动目标;α取值过大,虽然适应环境变化的能力增强了,但容易使目标溶入背景。
本文将背景建模分为背景初始和背景稳固两个阶段,分别采用不同的自适应策略来更新学习速率。
式中:n为当前视频流过的帧数;N为视频的前N帧;C1,C2均为常数,C1用于消除学习速率α在初始几帧变化过快所带来的目标溶入背景的现象,C2为背景稳固阶段的最大学习速率;ΔD为当前帧I(x,y)的前景与背景邻近8个像素值之差;i,j均为整数。
1)背景初始阶段(n<N):在视频开始的若干帧,由于背景尚未形成,故采用较大的学习速率以加快初始背景建模的速率;随着背景的逐渐形成,学习速率逐步减小。
2)背景稳固阶段(n≥N):形成背景以后,方差已经收敛,其学习速率应小于背景初始阶段的学习速率,以稳住背景。学习速率由前景和背景邻近像素值的差动态更新,以解决背景模型更新造成的“拖影”现象。其基本思想是:当ΔD较大时,说明前景像素运动较快,应适当加大学习速率来稳住背景;当ΔD较小时,说明前景像素运动较慢,则适当减小学习速率来稳住背景。
高斯分布是通过对大量灰度值统计提出的,当N太小时,统计的灰度值太少,初始背景模型不能达到稳定的高斯分布,导致后续背景模型很难达到稳定的高斯分布;同时,背景初始阶段的学习速率应该大于或等于背景稳固后的最大学习速率C2,故N也不能过大。N的取值一般为120≤N≤250。
2.2 阴影的抑制
视频序列中的运动阴影带有运动目标位置、形状等信息,容易被误判为运动目标,从而使得运动目标变形,甚至使目标丢失。因此,阴影抑制在运动目标检测中十分重要。与RGB色彩空间相比,HSV色彩空间更接近于人眼视觉模型,能直接反映色彩的亮度信息,从而可以更准确地区别阴影和运动目标[10]。
设IH(x,y) ,IS(x,y),IV(x,y) 分别为当前像素值的H,S和V 分量;BH(x,y) ,BS(x,y) ,BV(x,y)分别为背景像素值的H,S和V分量,则满足式(11)的像素值为阴影。
式中:ε,β,τ和λ为常数,0<ε<β<1;ε的取值主要考虑阴影的强度,阴影较强时,ε取较小值;β用来增强对噪声的稳健性;τ,λ用来增强阴影检测的抗噪声性能,一般选取较小的值。
3 实验结果与分析
为了验证本算法的性能,在VC++和OpenCV平台下,对GMM方法和本文方法进行了运动目标检测比较实验,测试序列为 HighwayⅡ(500帧,320×240),Campus(1179帧,352×288)和 Intelligent room(300帧,320×240),实验参数为:K=3,T=0.8,C1=20,C2=0.005,N=180,ε =0.4,β=0.95,τ=0,λ =50。
图1为测试序列HighwayⅡ第7帧的运动目标检测结果,主要比较两种方法背景建模初始阶段的检测效果。由于GMM方法的学习速率为固定值,导致背景并未完全更新,仍有部分运动车辆的残留,故会出现一些孤立的非运动目标。本文方法为在视频开始的若干帧采用较大的学习速率加快初始背景的建模,使得模型在初始阶段能更快地适应背景变化,从而提取的运动目标更接近于真实情况。
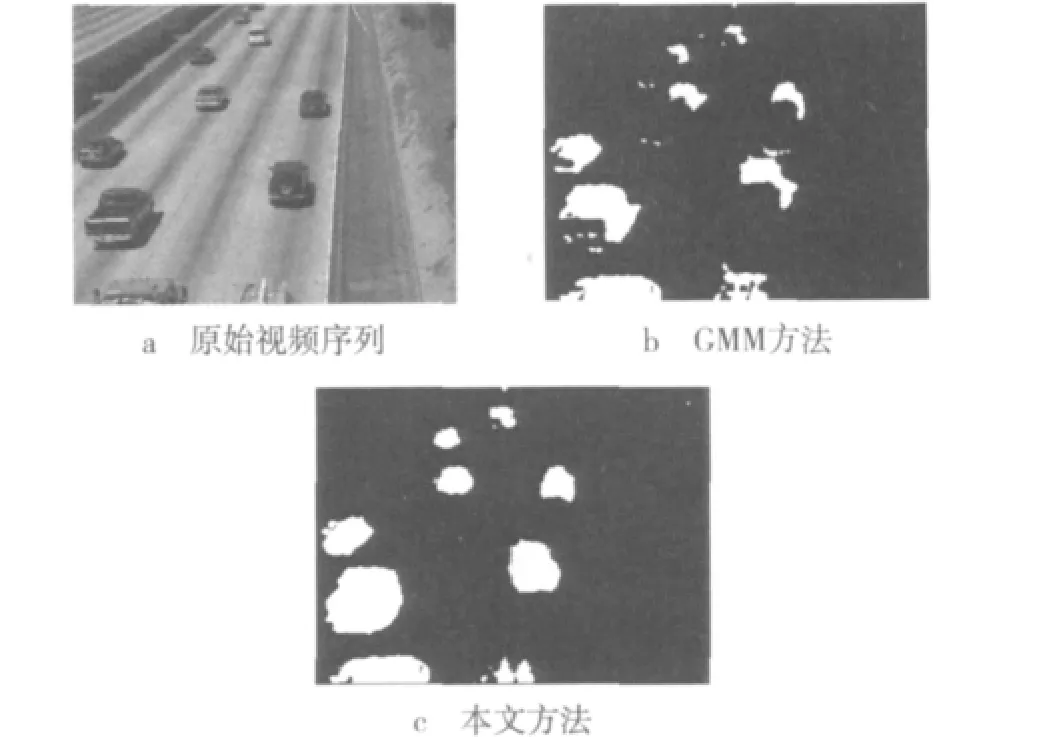
图1 HighwayⅡ序列的检测结果
图2为测试序列Campus第353帧的运动目标检测结果,主要比较两种方法背景建模稳固阶段的检测效果。GMM方法提取运动目标时,道闸被误判为运动目标,但道闸在第300帧时已经关闭,并处于静止状态。其原因是GMM方法的固定学习速率不能很好地适应场景的变化,一旦道闸被判定为前景,就需要较长的时间从前景中消失。本文方法采用自适应的学习速率调整策略,根据背景的变化动态调整学习速率,从而能够及时更新背景,准确地检测运动目标。

图2 Campus序列的检测结果
图3为测试序列Intelligent room第285帧的运动目标检测结果,主要比较两种方法对缓慢运动目标的检测效果。GMM方法在背景更新过程中,没有考虑目标运动速度的快慢,当目标运动过慢时,检测结果出现了不合理的“拖影”。本文方法采用前景和背景邻近像素值的差动态更新学习速率,根据目标运动的快慢自适应地调整学习速率,较好地解决了“拖影”问题。
此外,本文方法在HSV空间进行了阴影检测和抑制,消除了阴影的干扰,取得了较好的效果。
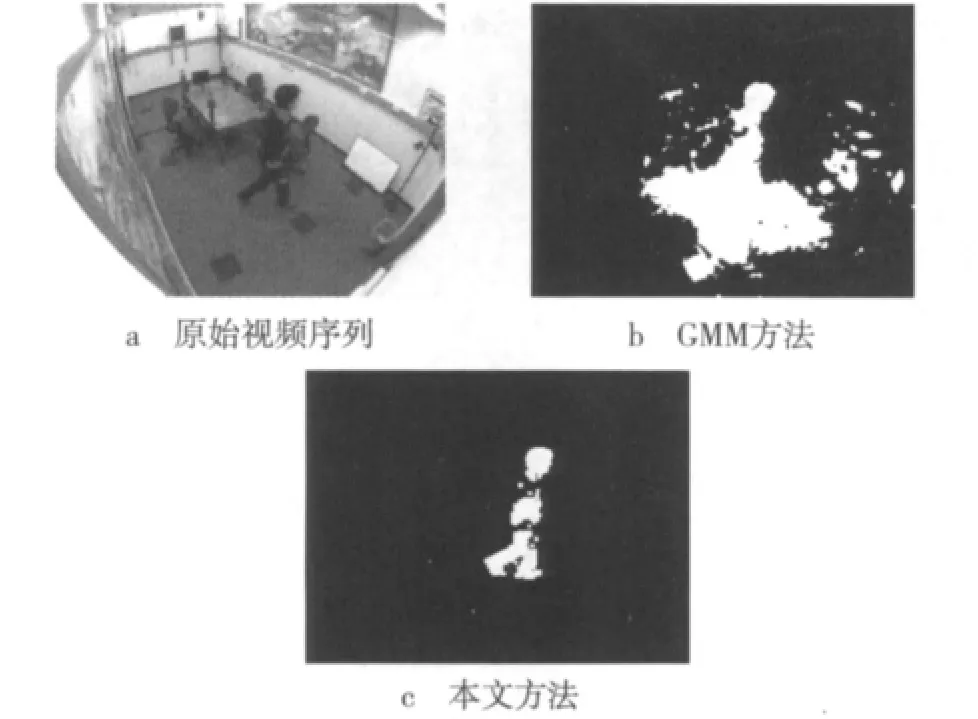
图3 Intelligent room序列的检测结果
4 结束语
学习速率是基于GMM的运动目标检测算法中的一个重要参数,对运动目标的检测效果有着重要的影响,自适应的学习速率调整策略是提高运动目标检测质量的有效途径。本文根据背景建模不同阶段的特点,分别采用不同的自适应调整策略动态更新学习速率,较好地解决了传统GMM方法采用固定学习速率所带来的问题,取得了较好的运动目标检测效果。
[1]张水发,丁欢,张文生.双模型背景建模与目标检测研究[J].计算机研究与发展,2008,48(11):1983-1990.
[2]罗寰,王芳,陈中起,等.基于对称差分和光流估计的红外弱小目标检测[J].光学学报,2010,30(6):1715-1720.
[3]王平,陈素华,董福洲.运动目标检测技术在智能监控系统中的应用[J].电视技术,2007,31(10):81-83.
[4]BENEZETH Y,JODOIN P M,EMILE B,et al.Comparative study of background subtraction algorithms[J].Electronic.Imaging,2010,19(3):301-312.
[5]STAUFFER C,GRIMSON W E L.Adaptive background mixture models for real-time tracking[C]//Proc.IEEE International Conference on Computer Vision and Pattern Recognition,1999.Fort Collins:IEEE Press,1999:246-252.
[6]江登表,程小辉.基于高斯运动模型的车辆检测[J].电视技术,2009,33(8):103-106.
[7]孙志海,张桦,武二永,等.非参数核密度估计视频目标空域定位技术研究[J].光电工程,2010,37(8):12-18.
[8]刘鑫,刘辉,强振平,等.混合高斯模型和帧间差分相融合的自适应背景模型[J].中国图象图形学报,2008,13(4):729-734.
[9]马义德,朱望飞,安世霞,等.改进的基于高斯混合模型的运动目标检测方法[J].计算机应用,2007,27(10):2544-2546.
[10]CUCCHIARA R.,GRANA C.,PICCARDI M,et al.Improving shadow suppression in moving object detection with HSV color information[C]//Proc.IEEE 2001 Conference on Intelligent Transportation Systems,2001.Oakland:IEEE Press,2001:334-339.
