基于降落图像的安全着陆点选择技术研究
2012-06-11王海涛马建华
王海涛 马建华
(北京空间机电研究所,北京 100076)
1 引言
目前,月球探测和火星探测等深空探测的主要方式是着陆在星体表面进行实地考察,安全着陆点的选择主要是依靠现有的关于月球或者火星表面图像来选择着陆区,美国“凤凰号”火星探测器即是地面工作人员选定着陆区,然后在着陆火星的巡航阶段对既定着陆区进行跟踪探测,但在整个降落着陆过程中,“凤凰号”并没有对着陆区进行实时性的判断,即使着陆点不适合着陆,着陆器也不能实时改变实际的着陆点,这对于探测任务的实现是一种威胁[1-2]。为实现着陆器安全精准着陆,本文通过对降落相机获取的降落图像的处理,得到着陆区的安全信息,识别出着陆区的障碍物,并提供出备选的安全着陆区。由于降落相机是在着陆器着陆过程中工作,所以这种方法能够为着陆器着陆系统提供必要的、及时的信息来决定是否改变着陆点,使得着陆器的着陆具有一定的自主性,从而保障着陆器安全着陆。这也是今后深空探测的主要方向。
2 降落相机工作过程
当前降落相机的工作任务主要是测量着陆器在着陆过程中的水平速度和垂直速度[3],同时它也是降落图像运动估计系统(Descent Image Motion Estimation System,DIMES)的主要传感器之一。但是本文需要利用降落图像判断着陆区的安全信息,其工作时间和工作过程都较目前降落相机的工作时间和工作过程有所改变。
当降落相机在大约2km的高度时,DIMES系统开始工作,降落相机拍摄3张降落图像[3]计算着陆器的水平和垂直速度,工作时间较短,拍摄的降落图像也很少。“勇气号”获取3张图像的高度分别是1 983m、1 706m和1 433m,每幅图像有3.75s的计算处理时间,计算出获取降落图像时着陆器的水平和垂直速度,再根据着陆器的水平速度之间和垂直速度之间的内部牵制关系来进行各个高度速度估计。例如“勇气号”DIMES系统计算出了海拔1 570m时,着陆器的水平速度为4.1m/s,垂直速度为9.7m/s,而估计得到助推火箭点火时的水平速度为和垂直速度分别为-1.2 m/s和10.7m/s,与实际情况都比较相符[4]。
本文要求火星着陆器降落相机拍摄的图像较多,工作时间较长。其工作过程如图1所示。
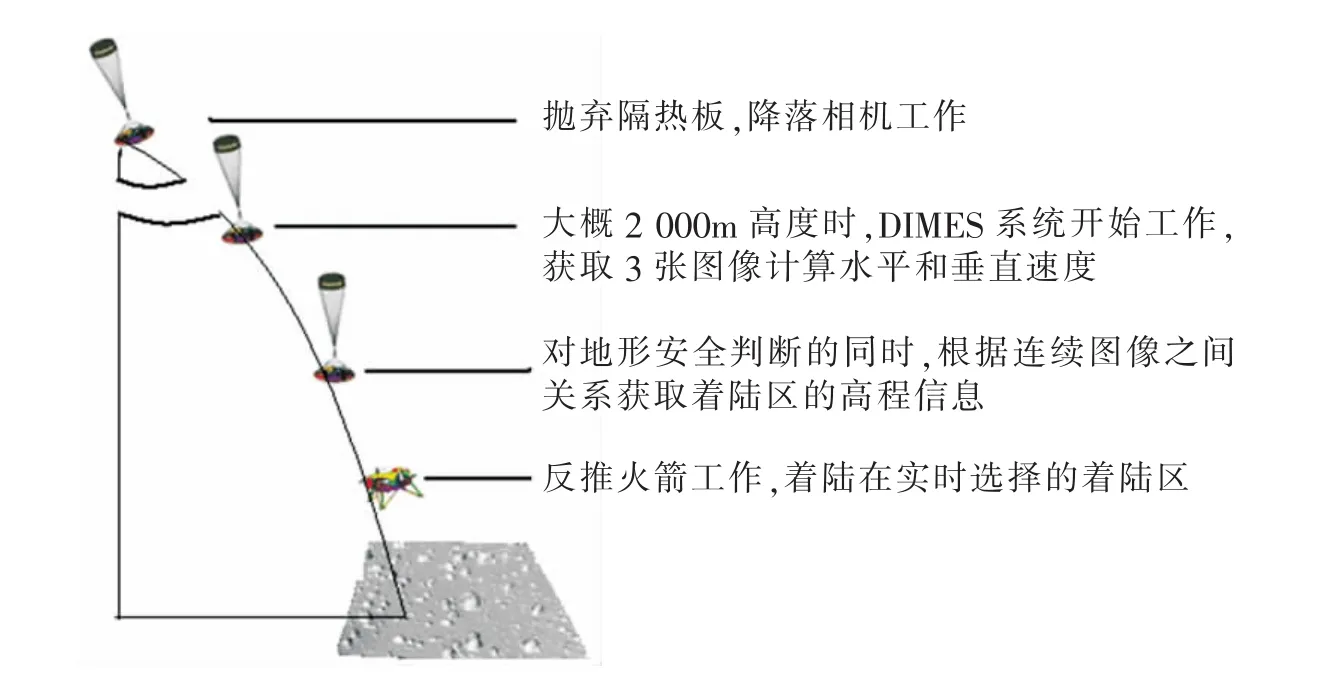
图1 降落相机工作过程Fig.1 Working process of landing camera
在大约12km的高度,着陆器抛弃隔热板,降落相机开始工作,不断获取着陆区的地形地貌图像,同时对降落图像进行处理,对石头、陨石坑等障碍进行识别,并根据拍摄图像时着陆器高度、降落相机焦距、降落相机敏感器像元大小等信息计算获取陨石坑和石头等障碍物直径和体积,为安全着陆点的选择提供依据。在大约2km的高度时,DIMES系统开始工作,利用部分降落图像来计算着陆器的水平速度和垂直速度。
大约距离地面120m高度时,反推火箭开始工作,降落相机工作结束。
由上面对降落相机工作过程分析可知,作为DIMES系统主要传感器之一的降落相机是目前深空探测获取水平速度和垂直速度的主要传感器之一,但是降落相机是在着陆器降落过程中成像,本身可以实时获取着陆器降落过程中着陆点地形地貌信息,而目前的深空探测的降落相机并没有利用这一特点。考虑更安全更有效的实现着陆器的安全着陆,本文重新设计降落相机的功能如下:
1)降落相机通过对获取的降落图像进行处理计算来获取着陆器水平速度,并提供着陆器水平速度信息,这项技术已经应用于火星探测的实际当中;
2)获取着陆器降落过程中各个高度时降落区域的火星地貌特征图、地形地貌图像,对火星表面的地形地貌图像进行存储和处理分析,得到地形地貌包括石头、陨石坑等的实时信息;
3)根据图像处理的结果,提供出备选的安全的着陆区。
3 着陆点选择
3.1 着陆点选择原理
着陆器在降落过程中,降落相机在各个高度获取着陆区的图像信息,根据着陆器的高度和降落相机的焦距、像元大小等已知的参数信息,可以计算得知每幅图像每个像元代表的地面分辨率。然后对于每一幅图像,利用障碍物的阴影信息对障碍物进行识别,判断出障碍物的大小,对于不能对着陆器安全着陆构成威胁的障碍物进行过滤,最后根据着陆点选择算法,选择备选的安全着陆区。具体计算步骤如下:
1)对每一幅降落图像,采用离散二维熵双阈值分割方法对图像进行分割[5]。
原理是图像中目标(石头)、背景(包括目标的阴影)共同构成了整幅图像,背景占据了大部分的灰度信息。将目标与背景分离开来,采用离散二维熵双阈值分割方法进行阈值选择[6],对图像进行分割。离散二维熵H定义如式(1)所示:

式中 pi,j为点灰度—区域均值对(i,j)发生的概率:

N×M为图像大小,ni,j为图像中心点灰度i区域均值为j的像素点的个数。
以原始灰度图像(L个灰度级)中每个像素及其8邻域的8个像素为1个区域,计算出区域灰度均值图像,这样原始图像中的每1个像素点都对应于1个点灰度—区域灰度均值对,进行处理得到降落图像的二维直方图。
2)用最优阈值选择方法选择阈值[6]。
选择原理是根据不同的概率分布,对pi,j进行归一化处理,使得不同区域的熵之间具有可加性。设阈值为(s,t),定义熵的判别函数如式(2)式所示:

式中 PA为A区总概率;HA为A区二维熵;HL为整个图像的二维熵。


图2 处理单元Fig.2 Process element
计算使得式(2)取最大值的灰度值即为最佳阈值。选择最佳阈值之后对降落图像进行分割,可得出石头和阴影图像。在对阴影进行去除处理,得到石头图像。
3)识别出着陆区的石头,并对那些不能对着陆器构成威胁的石头进行处理[7]。
去除石头和阴影图像中的阴影部分可得石头图像,并处理不能对着陆器构成威胁的石头。处理方法如下:假设降落相机焦距50mm,像元大小12μm,则着陆器高度8km时地面像元分辨率为1.9m,以4个像元为1个处理单元,如图2所示。对直径大于1.9m的石头或者陨石坑等障碍物进行识别。当着陆器高度为3km时,地面像元分辨率为 0.72m,同样以4个像元为1个处理单元,则可以对直径(星体表面水平方向的障碍物最大宽度)大于0.72m的石头或者陨石坑等障碍物进行识别。以此类推,当着陆器高度是350m左右时,地面像元分辨率为大约8cm,根据经验,直径为8cm的石头或者陨石坑已经不能对着陆器安全着陆构成威胁,在高度更低时,可以对直径小于8cm的石头或者陨石坑不予考虑。
本文以石头面积小于4个像元面积为例进行处理,并对图像进行分块,对每1块进行图像均值和方差比较,最小的块即可作为待选着陆区,其着陆区的选择流程如下:
将代表石头的那些数据换成实际灰度值,然后对该图像进行分块处理,每块大小为着陆器占地面积大小的4倍,本文假设着陆器占地面积对应的像元数为40像元×40像元;对每1个分块进行灰度均值和方差计算,选取最小的那1块;判断上一步选择的待选着陆区是否靠近该降落图像的中间地带,如果是则作为着陆区的待选区域,经过计算可得到符合石头安全识别的待选着陆区域;结合这些备选着陆区的高程信息、坡度坡向和粗糙度信息进行选择[8],最终确定备选着陆区。
4)结合着陆区的高程等信息,使用多敏感器方法选择合适的着陆区。
5)在之后的降落图像中对该着陆区进行跟踪,随着分辨率的提高进一步缩小着陆区,按照着陆区的选择流程进一步判断选择安全着陆区,在反推火箭开始工作之前,确定最终着陆区。
3.2 MATLAB仿真结果
图3是“火星探测漫游者”MER火星着陆器降落相机获取的降落图像,图像大小是256×256像元。对图3进行处理,得到二维直方图如图4所示。由图4所知,pi,j的概率高峰主要分布在图5所示的iOj平面的对角线部分,整体呈现出双峰一谷的状态,由于图像中目标和背景点占据的比例最大,而目标区域和背景双峰分别对应于目标和背景,而目标和背景区域的灰度,比较均匀,点灰度和区域均值灰度相差不大,所以都集中在对角线附近,而双峰分别代表目标和背景。

图3 图像原图Fig.3 Original image

图4 二维直方图Fig.4 2D histogram
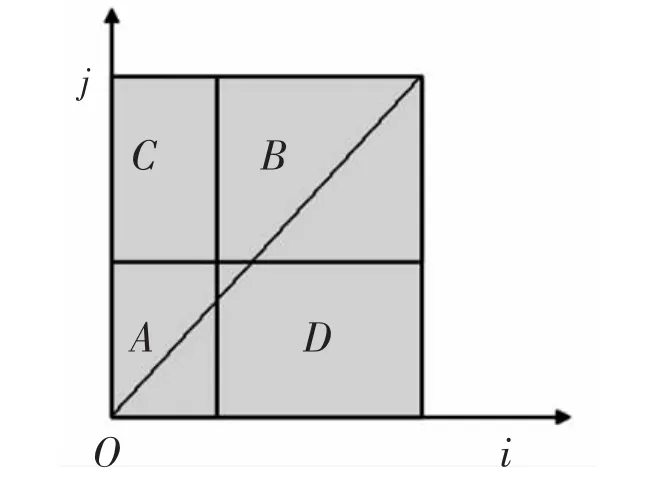
图5 iOj平面Fig.5 Plane iOj
计算可得使得式(2)取最大值时,对应的灰度值为178;同理,将PA换成PB,HA换成HB得到使得式(2)取最大值时对应的灰度值是46。根据上面的分析,灰度大于178的那部分是石头的向光部分,灰度小于46的那部分石头的恶阴影占据大部分,所以以此二阈值进行二值化处理得到阴影和石头的二值化图像,如图6所示;再根据阈值46进行二值化处理得到阴影的二值化图像,并与图5进行减去处理可得到石头的二值化图像如图7所示。
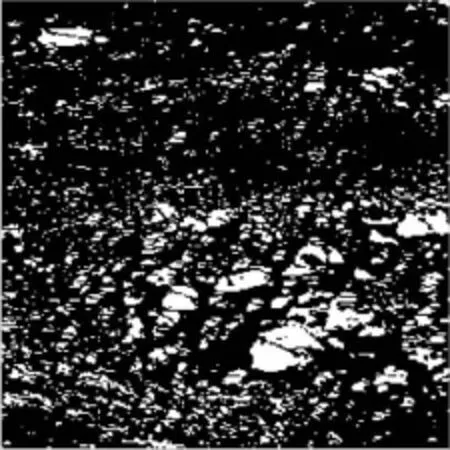
图6 石头与阴影图像Fig.6 Image of stones and shadows

图7 目标识别图Fig.7 Target identification image
将代表石头的那些数据换成实际灰度值(见图8),再根据假设着陆器占地面积为40像元×40像元对图8进行分块,对每1个分块进行灰度均值和方差计算,按照着陆区的选择流程得到待选着陆区域如图9灰色方框区域所示。
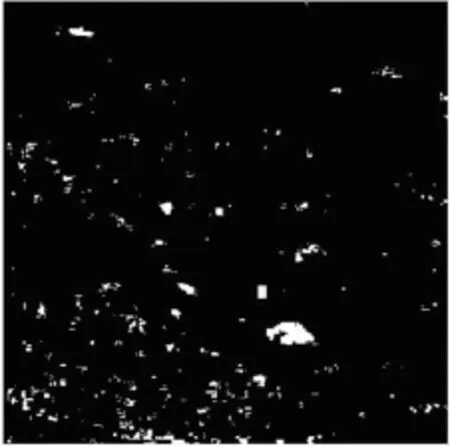
图8 影响着陆石头图像Fig.8 Image including unsafe stones
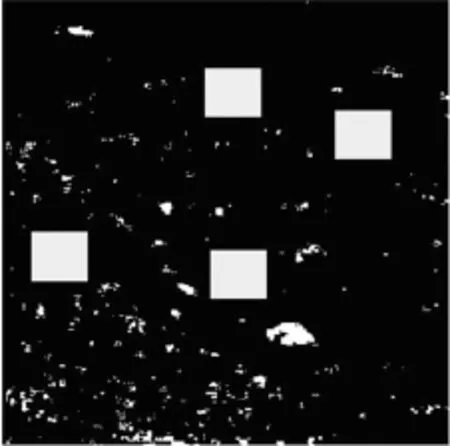
图9 着陆区选择Fig.9 Image for landing zone choosing
通过对降落相机获取的每1张降落图像进行如上处理,可以得到安全的备选着陆区,再结合备选着陆区的坡度坡向信息、高程信息和粗糙度信息来综合选择最终的着陆区。
4 结束语
本文介绍了降落相机的工作过程,并根据深空探测对着陆器更高的要求,对降落相机功能进行了扩展,增加了降落相机避障和着陆点选择的功能,按照这些功能的要求,本文以火星探测为例对降落相机的避障和着陆点选择技术进行了分析,并以石头识别为例进行了了避障和着陆点选择仿真分析。
利用降落相机获取着陆区降落图像进行地形安全判断和避障,具有集成度高、技术成熟和适应性强等特点,而且经过仿真,利用对降落图像进行处理,速度快,能够做到在降落过程中实时判断和选择着陆区,这对于我国深空探测着陆技术进一步发展具有一定的参考意义。
(References)
[1]付丽章.火星着陆自主避障技术—模糊逻辑地形分析算法研究[D].中国空间技术研究院硕士论文,2009.FU Lizhang.Autonomous Hazard Avoidance Technology for Landing on Mars-Research on A Fuzzy Logic Terrain Analysis Algorithm[D].China Academy of Space Technology,2009.(in Chinese)
[2]Prasun N D .Entry,Descent,and Landing Performance of the Mars Phoenix Lander[C].AIAA/AAS Astrodynamics Specialist Conference and Exhibit,Hawaii,2008:18-21.
[3]Johnson A E,Klumpp A R,Collier J B,et al.Lidar-based Hazard Avoidance for Safe Landing on Mars[J].Journal of Guidance,Control,and Dynamics,2002,25(6):1091-1099.
[4]Matthies L,Huertas A,Cheng Y,et al.Landing Hazard Detection with Stereo Vision and Shadow Analysis[C].Proc AIAA Infotech at Aerospace Conference,2007.
[5]丁萌.基于被动图像的探测器着陆过程中岩石检测[J].光电工程,2009,36(1)82-87.DING Meng.To Detect the Stones in the Landing Progress of Lander Based on Passivity Images[J].Opto-electronic Engineering,2009,36(1):82-87.(in Chinese)
[6]Cheng Y,Johnson A,Olson C,et al.Optical Landmark Detection for Spacecraft Navigation[C].13th Annual AAS/AIAA Space Flight Mechanics Meeting,2003.
[7]Johnson A E,Matthies L.Precise Image Based Motion Estimation for Autonomous Small Body Exploration[C].Proc 5th Int’l Symp.Artificial Intelligence,Robotics,and Automation in Space (iSAIRAS 99),European Space Agency Publications Div,1999:627-634.
[8]Bernard D,Golombek M.Crater and Rock Hazard Modeling for Mars landing[C].Proc Space 2001 Conference and Exposition.
