基于超宽带雷达的丛林目标探测无人机系统分析
2012-06-10曹秋生刘贺军马建超
曹秋生,刘贺军,马建超,王 勇
(中国电子科技集团公司第27 研究所,郑州 450047)
0 引 言
在边境监视、丛林作战等军事/准军事应用,以及山区救援、森林防护、非法偷猎打击等民用活动中,如何对隐藏于丛林中的各类目标进行探测、识别、定位、跟踪,一直是困扰人们的难题,因为目标部分或全部被树丛遮蔽,普通技术手段难以透过树丛“看见”目标。
红外热像仪基于目标与周围环境的温差可透过稀疏树丛探测到目标,但受雾的影响较大,且不适合稠密树丛环境,而超宽带(UWB,ultra-wide band)雷达其信号具有丰富的低频分量,可穿透叶簇探测丛林目标,并不太受雾的影响,结合合成孔径处理,可以实现成像和目标识别。
无人机具有无人员伤亡风险、制造和使用成本低、留空时间长等优点,适合执行空中侦察与监视任务。将无人机和丛林目标探测传感器结合,可有效解决目标低可探测性和目标区域难以抵达性的双重难题。因此,具有成像功能和叶簇穿透能力的超宽带地面动目标显示/合成孔径雷达(GMTI/SAR)及与无人机平台的系统集成研究和试验验证得到重视,美国在研发和应用方面走在世界的前列[1]。
从介绍国外典型系统研发情况和描述超宽带雷达的工作原理和特点出发,研究超宽带SAR 无人机的系统集成,分析并讨论其难点技术问题和工作方向及重点。
1 国外典型系统研发情况
瑞典第一代机载传感器SARABAS(1992 年)用于研究超宽带机理及受衍射极限限制的散射模型,改进后的SARABAS II(1996 年)用于穿透叶簇检测人工隐藏目标[2];2002 年研制成功工作在20 ~90 MHz(SAR)和200 ~800 MHz(SAR/GMTI)的LORA(Low Frequency Radar)系统,安装于“军刀(Sabreliner)”客机上,2005 ~2010 年间开展了一系列可穿透叶簇的SAR 成像和动目标检测试验。法国宇航实验室(ONERA)在星基多波段特征提取雷达RAMSES 系统基础上研制出三通道L 波段合成孔径雷达/地面动目标显示(SAR/GMTI)系统,法国宇航中心(DLR)的E-SAR 系统也具有叶簇穿透能力。1997 年意大利开始ARCHEO 计划,其ALS-SAR 系统工作在100 ~500 MHz 波段,带宽200 ~400 MHz,若增加接收天线也可具有叶簇穿透能力。
GeoSAR(C-12 喷气机载)和FOPENSAR(全球鹰无人机载)是美国空军发展的两种双波段超宽带目标监测和地形测绘合成孔径雷达[3],均工作于较低频段以有效穿透树丛,获得高质量的地面图像,检测在树木或丛林掩盖下的目标或地形分布。DARPA 的“树叶穿透侦察、监视、跟踪和交战雷达”(FORESTER)据称可从约50 km 远处透过稀疏的树冠、约30 km 远处透过稠密的树冠进行观测,具有地面动目标显示/合成孔径(GMTI/SAR)功能,由Syracuse 公司研制,工作在P 波段(225 ~390 MHz),采用近6m 长的线性阵列天线进行机械定向和电子扫描,重272 kg,方位角探测范围±45°,部署在无人机上,空中盘旋工作时,天线对准目标区域,在6186 m高空其地面探测范围为400 km2。2010 年9 月,FORESTER 在波音公司A160T(军方代号YMQ-18A)无人直升机上进行了飞行试验(如图1 所示),尽管无人机在着陆时意外坠毁。

图1 A160 无人直升机加装天线
洛克希德·马丁公司为美国陆军的情报和信息站指挥部开发了TRACER,一种双波段(VHF/UHF)战术监视和反隐藏合成孔径雷达,可抑制地面杂波和固定目标的回波,探测隐藏于植被下、丛林和森林中的车辆、建筑和大型金属目标,定位移动和便携目标位置。其功耗不到2 kW,重约91 kg,可加装于空中平台,实时处理信号,绘制3D 合成孔径雷达图像并及时下传到地面站。
法国《防务宇航》网站2011 年4 月19 日报道,TRACER 安装在MQ-9“捕食者”B 无人机上,完成了历时4 个月、100 小时的飞行测试,在为无人机系统构建的苛刻环境中试验了对威胁目标的识别能力,验证了雷达性能,演示了用卫星数据链控制无人机平台和雷达系统,降低了雷达安装在4 级无人机或其他平台上的技术风险,例如YMQ-18A 无人直升机。
2 超宽带雷达及其特点
超宽带技术的最初发展可追溯到20 世纪50 年代末[2],而超宽带雷达的系统性研究始于20 世纪90 年代[4],其一般定义为雷达发射信号的分数带宽,或雷达辐射信号的带宽指数(信号频谱宽度与其中心频率的比值),或系统和信号的瞬时相对带宽大于0.25 的雷达。超宽带雷达呈现出称之为超宽带无线电信号频率二重性的特殊性质,即低频信息与高分辨率,使超宽带雷达可以获得更多更精细的目标信息。
系统具有许多优点,(1)高距离分辨率:可达亚米级;(2)目标成像能力:窄带雷达一个目标通常只形成一个集中回波,而UWB 雷达形成一系列携带不同角度信息的回波,通过合成孔径处理,结合高分辨距离信息,可提供高分辨率(数十厘米级)目标三维图像;(3)目标识别能力:UWB 雷达的回波由目标的早期响应和晚期响应组成,利用早期响应可得到目标的一维距离像,利用晚期响应可得到目标的极点信息,而大多数雷达目标的极点具有不变性,与目标的形状、结构、材料相关,与视角无关,是目标的固有特性。如果获得的高分辨率三维图像具有足够多的细节以区别于其他目标,就能实现目标识别;(4)强电磁穿透能力:低频电磁波对非金属介质具有强穿透性,而UWB 雷达信号包含几乎从直流到高频几千兆赫兹的频率分量,其中丰富的低频分量使得超宽带雷达具有穿透丛林、树叶、非金属墙的能力,可用于探测丛林地区的地形地貌、隐藏于丛林中的目标及地表和墙后目标。雷达的中心频率越低,穿透能力越强。
UWB 雷达的基本组成如图2 所示,与其他雷达没有本质区别,主要包括宽带信号产生器、宽带发射机、宽带接收机、宽带收/发天线和信息处理机等。
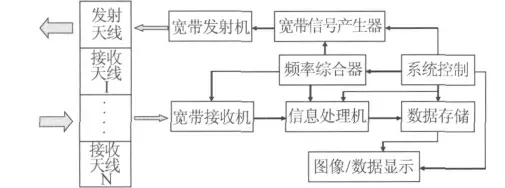
图2 超宽带雷达组成原理框图
(1)超宽带信号产生和发射:在指定频段和频带上产生规定形式并达到规定功率水平的信号。UWB 雷达根据发射信号形式不同分为两类[5],一类为UWB 微波雷达,带宽指数在25%以上,采用频率/相位调制获得超宽带信号,采用线性调频、伪随机码等常规的信号形式,而以线性调频(LFM)方式最为普遍,技术较为成熟;另一类是UWB 冲激雷达,频带从直流到GHz,带宽指数达75% ~100%。冲激信号是一种无载波信号,有单极脉冲、单周波和多周波等形式,脉宽一般为纳秒级。UWB 冲激雷达系统结构简单,冲激源直接输出激励天线,不需任何变换和放大,不需脉冲压缩处理,简化了信号处理系统,但由于发射功率不易做得很高会限制雷达的作用距离。
(2)超宽带天线:在指定频段和频带上满足增益和波束角的要求,具有良好的幅相特性并能承受高峰值功率,并要综合考虑其空间特性、时域特性和频域特性。对于冲激雷达,时域天线有圆柱形天线、双锥天线、加载蝴蝶形天线和TEM 喇叭天线、Vivaldi 天线等[6]。通常叶簇穿透雷达采用接近全向的天线以有利于高分辨成像,但同时会降低运动目标的信杂比。对于GMTI,需要长天线来提供大的SAR积累角,实现目标探测和抑制掩盖地面动目标的平台杂波扩散。天线长度尺寸与平台速度和最小可检测速度(MDV)有关[7]。天线外形可参见图1。
(3)超宽带信号接收:在指定频段和频带上满足超宽带信号的低噪声放大和信号变换。接收机必须具备良好的杂波抑制能力,以从复杂背景中提取有用信号。接收通道可以是单通道、双通道或多通道,沿航线方向放置。单通道系统实现简单,但杂波抑制能力较弱。
(4)超宽带信号处理:以高速并行方式实时或事后处理大容量数据流,获取目标信息,形成目标图像。目标成像算法有后向投影成像算法[8]和时间反转成像技术[9]等。运动补偿处理可以基于飞行平台传感器数据,也可基于回波数据。实际工作中是将成像算法与运动补偿算法进行组合。
衰减和后向散射是影响雷达探测性能的主要因素,叶簇衰减、杂波和去相关效应在较低频段上相对较小,尽管与丛林的茂密程度等密切相关。理论和试验均表明,叶簇穿透UWB 雷达的首选波段是VHF(30 ~300 MHz)和UHF(300 ~1000 MHz)波段。VHF 波段在穿透叶簇时的双程衰减平均小于UHF 波段2 dB,小于L 波段15 dB,小于C 波段30 dB 以上,并且叶簇衰减随频率降低呈单调下降趋势。VHF 波段的平均后向散射系数比UHF 波段低9 ~10 dB,但与频率间不是简单的单调增/减关系。然而在VHF 波段射频干扰更严重,而且频率越低,合成孔径时间越长,运动目标的信杂比相对越低,实现高分辨率SAR 图像越困难,也不利于检测运动目标。为此,系统通常选用VHF 和UHF 双波段。
距离向分辨率由发射信号带宽决定,带宽越宽,距离分辨率越高,还受各种信号展宽因素的影响。方位分辨率是通过飞行过程中形成的大的合成孔径来加长相干积累时间,采用“多普勒锐化”(非聚焦处理)方法,或将在相干时间内由于雷达至目标距离变化而引起的相位非线性变化和包络平移通过补偿作处理的聚焦处理方法而实现的[10]。
发射信号的脉宽应保证最小作用距离大于盲距,重复频率上限受到距离无模糊条件的约束,下限受SAR 成像方位分辨率的约束。雷达峰值发射功率与作用距离的关系由雷达方程[11]确定。
3 无人机平台选择
SAR 要得到较高方位成像分辨率,需要较窄的波束宽度,因而理论上需要相当大尺寸的天线,而实际上难以实现。因此,将无人机与SAR 结合,利用飞行轨迹等效天线在飞行方向的尺寸延伸,达到“合成”的目的。
无人机的种类很多,性能特点也不尽相同[12]。中低空领域往往为小型无人机,技术和产品都相对成熟,中高空领域往往为中大型无人机,虽已有不少相当成熟的装备,如美国的捕食者和全球鹰等,但总体上在平台和系统层面都还在持续发展之中。
无人机的系统设计和参数选择主要依据使用要求、技术水平、任务性质和成本等来确定。无人机的规模与要搭载的载荷的重量密切相关,其有效载荷与起飞重量之比大致为1 ∶5,平台升限越高,续航时间越长,有效载荷越小。此外,超宽带SAR 为高价值设备,选择成熟的无人机平台,适当进行适应性改进,有利于降低风险,加快进度。
丛林目标探测任务往往在山区作业,其海拔和山顶高度是必须考虑的因素。因此一般选择具有一定升限和续航时间并具备足够有效载荷能力的中高空固定翼无人机,或中、大型无人直升机作为平台,后者起降方便,可悬停和沿山谷或山势走向、抵近目标飞行,以获得更清晰的目标图像和更精确的目标信息,同时降低发射功率需求。
理想运动状况下雷达在无人机飞行过程中以确定指向和恒定速度作平行于地面的直线运动,而实际上无人机的飞行受气流影响会产生位置变化和偏航角、横滚角及俯仰角等姿态变化,前者影响到目标的距离,进而影响回波相位,后者则影响波束指向,其结果都是导致成像精度变差。因此,无人机装有高精度惯导系统(INS)和全球定位系统(GPS)来改善和测量位置误差,支持基于仪表测量的运动补偿处理。
对于固定翼无人机,采用较大展弦比的机翼及较高的升阻比可延长续航时间,并具有较好的纵向、横向稳定性,可降低运动补偿处理难度。对于无人直升机,其飞行控制系统应能在大气扰动时保持其平稳飞行。此外,无人机以较低速度飞行有利于检测慢速运动目标。
作为参考,列出搭载FORESTER 雷达进行飞行试验的波音公司A160T(军方代号YMQ-18A)无人直升机[12,13]及搭载TRACER 的MQ-9“捕食者”B无人机[12]的主要性能指标和参数,见表1。
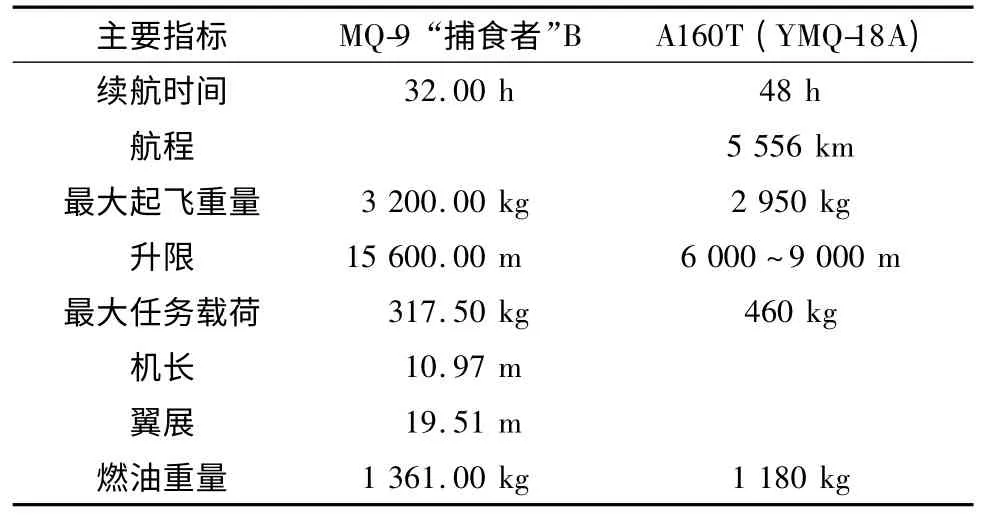
表1 MQ-9“捕食者”B 和A160T (YMQ-18A)主要指标和参数
4 系统实现及技术分析
无人机应用系统的实现通常是将任务载荷加装于无人机平台,基本要求是在结构和电气方面二者适配,即在确保无人机平台正常飞行前提下任务载荷能够正常工作并实现既定的指标和性能。以常见的搭载光电吊舱的侦察无人机为例,见表2,由于典型的光电吊舱重量通常在几kg 至50 kg 范围内,最大物理尺寸一般不超过50 mm,且形状基本为圆球(柱)形,供电最大不会超过几百瓦,因此通常光电侦察无人机起飞重量在200 ~300 kg 以下,任务载荷的供电需求容易满足且在扫描旋转工作时对飞行器平台的性能影响可忽略不计。
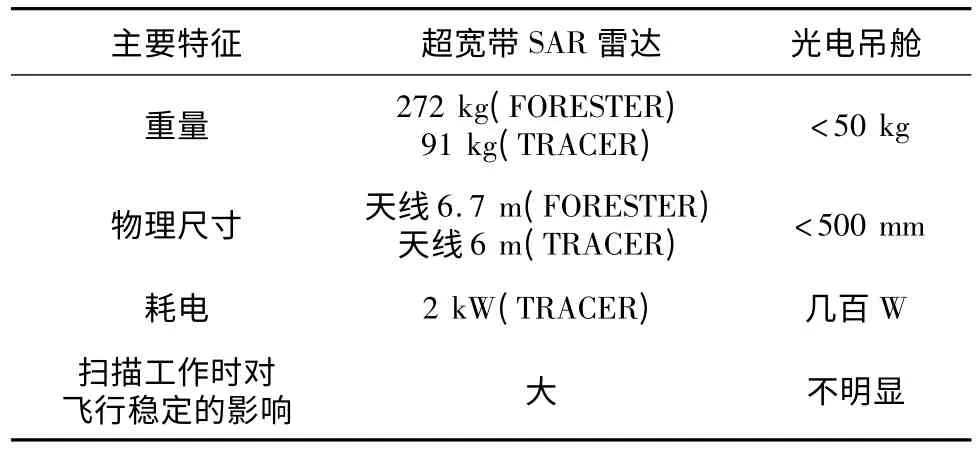
表2 无人机超宽带SAR 和光电吊舱的典型特征比较
相比之下(见表2),超宽带SAR 在重量、物理尺寸、供电等特征上与光电吊舱差异巨大,要实现叶簇穿透超宽带SAR 和无人机的系统集成面临许多难题。
首先,超宽带SAR 重达百千克量级或以上,因而无人机平台应是中大型的,起飞重量甚至需要达到吨级以上(参见表1),这意味着较大的经费投入、较长的研制周期和较高的研制、试验风险。
其次,超宽带SAR 的天线物理尺寸达几米,可与固定翼无人机的机翼或无人直升机的旋翼尺寸相比拟,在天线的布置、安装及机械扫描工作时可能影响无人机平台的飞行性能,必要时应对加装天线后无人机的空气动力学特性进行核算,以确保飞行稳定、可靠和安全。
第三,雷达载荷的供电要求高,对无人机平台是不小的压力。在保证系统灵敏度的前提下,应精心设计天线增益和工作频率以尽量降低雷达发射功率。机械扫描和雷达发射机脉冲高压工作时可能产生较强电源冲击和电磁辐射,需要采取有效的电磁兼容措施,确保飞行安全和全系统正常工作。
第四,对于无人直升机,由变化的速度和桨距引起的交变气动载荷及由桨叶与尾涡之间交叉干扰引起的振动载荷导致直升机振动[14],而这种振动无法被滤掉,因此,雷达必须有较好的抗振能力,并且安装时要有减振措施。即便如此,这种振动对无人机的姿态和位置的扰动也可能影响SAR 的成像精度,增加运动补偿处理的复杂性。
第五,系统往往在山区使用,不仅要满足大容量高速数据传输对带宽和实时性的要求,还必须考虑山区复杂环境对测控和信息传输链路的影响,必要时应采用中继或卫星通信手段。
5 结 语
基于UWB 雷达的丛林目标探测无人机系统复杂,技术难度大,要在工程上实现并可实际应用,不仅要求雷达重量轻、体积小、耗电少、探测能力强、信息处理速度快和环境适应性好,而且无人机平台应具有一定的规模,足够的载荷、航时、升限、供电能力和良好的山区测控通信能力。雷达与无人机平台的良好匹配是系统实现的关键。
总之,具有穿透叶簇能力的UWB 雷达其技术还在发展当中,而与无人机结合用于丛林目标探测更是处在初步阶段。除UWB 雷达自身的发展还面临诸多技术挑战外[7],从系统集成和应用角度出发,需关注的工作方向和重点包括以下六点。
(1)进一步提高成像分辨率:米级成像分辨率可满足对车辆、建筑物探测及地形地貌勘测的要求,但若要分辨出更小的目标,则需将成像分辨率提高至分米量级。
(2)合理选择无人机平台:固定翼无人机可在探测区域上空飞行,实现大范围覆盖普查;无人直升机无需专用起降条件,机动性好,可悬停工作,可接近地面飞行,适合局部小范围详查和战术应用。
(3)雷达小型化:以适用于中小型无人机平台,降低系统规模和研制、试验、使用风险,便于推广应用。对于使用固定翼无人机的情况,研究天线与机翼共形技术,降低由于加装天线而带来的对无人机飞行特性的影响。
(4)高分辨实时图像处理技术:开展高速并行处理技术及算法研究以实时获得高分辨目标图像,消除树干、树叶遮挡或随风运动对成像的影响,实时发现、识别、定位并跟踪感兴趣的目标,实时给出目标的运动轨迹。
(5)基础数据库建立:针对丛林环境开展深入的理论和试验研究,进行典型植被的衰减特性和典型目标的电磁散射和回波特性分析建模和测试,支持雷达的系统设计。
(6)防撞设计:确保无人机特别是无人直升机在山区的飞行安全。
[1]梁甸龙,陆仲良. 超宽带雷达技术[J]. 国防科技参考,1998,19(1):71-73.
[2]李海英,杨汝良. 超宽带雷达的发展、现状及应用[J].遥感技术与应用,2001,16(3):178-183.
[3]TOMLINSON P G,et al.Technical Challenges in Ultra-wide Band Radar Development for Target Detection and Terrain Mapping[C]//International Radar Conference,1999:1-6.
[4]JAMES D TAYLOR.Introduction to Ultra-Wide Band Radar System[M]. USA:CRC Press Boca Raton,1995.
[5]张直中.雷达信号的选择与处理[M]. 北京:国防工业出版社,1979.
[6]伊洋. 冲击脉冲雷达天线设计与成像试验初步研究[D].成都:电子科技大学,2009.
[7]MARK E DAVIS. 超宽带多模雷达面临的挑战[C].2011 国际雷达会议,成都,2011.
[8]CUI G,et al.A Back-Projection Algorithm to Stepped-Frequency Synthetic Aperture Through-the Wall Radar Imaging[C]//Process of 1st Asia-pacific Conference on Synthetic Aperture Radar,2007:123-126.
[9]LIU D,et al. Electro-Magnetic Time-Reversal Imaging of a Target in a Cluttered Environment[C]//IEEE Transactions on Antennas and Propagation,2005,53:3058-3066.
[10]保铮,邢孟道,王彤.雷达成像技术[M]. 北京:电子工业出版社,2005.
[11]M I 斯科尔尼克.雷达手册[M]. 谢卓,译.北京:国防工业出版社,1978.
[12]《国外无人机大全》编写组.国外无人机大全[M]. 北京:航空工业出版社,2001.
[13]徐云.A160“蜂鸟”无人直升机的新进展[J]. 无人机杂志,2010(5):37-41.
[14]肯·格林那.直升机设计[M]. 高正,等,译. 南京:南京航空学院直升机技术研究所.
