面向dSPACE教学的应用实验单元设计与实践
2012-04-26谢海斌史美萍龙志强
谢海斌,史美萍,龙志强
(国防科学技术大学机电工程与自动化学院,湖南长沙 410073)
0 引言
dSPACE实时仿真系统为快速控制原型RCP(Rapid Control Prototyping)与硬件在回路仿真HILS(Hardware-in-the-Loop Simulation)两方面应用提供了一体化解决途径。目前,dSPACE在航空、航天、汽车、发动机、电力机车、机器人、驱动及工业控制等领域已被广泛应用[1]。
我们面向相关学科研究生或高年级本科生开设了15学时的“基于dSPACE的控制系统快速原型设计与硬件在回路仿真”实验课程,采用课堂讲授与实验相结合的方式实施,使学生了解与初步掌握的基本概念、原理和方法。该课程作为控制学科研究生的必修实验课程,同时还可供机械、仪器、航空、航天、电子、计算机等相关学科研究生与高年级本科生选修。
由于研究生毕业于不同的学校和专业,学科背景、专业基础和能力素质存在较大差异,因此,实验环节按照循序渐进原则依次开展二个单元共四个实验。其中,基础实验单元为“基于dSPACE的多功能信号发生器快速原型设计”,主要目的是使学生能够熟练掌握基于Matlab/Simulink的动态系统图形化建模与仿真方法,了解dSPACE软硬件开发环境,初步掌握dSPACE的开发设计流程以及RTI与ControlDesk的使用方法。
应用实验单元为“基于dSPACE的步进电机控制系统快速原型设计”,种类繁多的各类电机是最主要的执行器件。针对不同的电机及其应用场合,控制方式与要求差异显著[3-6]。而采用数字信号控制的步进电机,用作教学是一类理想的研究和实践对象。因此,采用带有驱动器与增量编码器的二相步进电机组件作为被控对象是合适的。
1 实验内容与要求
利用dSPACE系统递进地完成步进电机开环控制系统与闭环控制系统的快速原型设计与硬件在回路仿真,可以巩固与深化对dSPACE设计理念与方法的理解,掌握基于dSPACE的实际应用技能,锻炼学生在控制系统设计过程中综合运用所学知识发现问题、分析和解决问题的科研能力和工程素养。
应用实验单元由两个实验(共6个学时)构成。
(1)“基于dSPACE的步进电机开环控制系统快速原型设计”。该实验让学生了解电机控制系统的基本原理,掌握步进电机与增量编码器的工作原理和电气特性以及RTI中的D2F模块和增量编码器相关模块的使用方法;完成步进电机组件(含步进电机驱动器与增量编码器)与dSPACE平台对应I/O端口的正确连接;通过构建快速控制原型,实现对步进电机的启停、调速以及正反转控制,为步进电机位置伺服控制快速原型系统设计奠定基础。
(2)“基于dSPACE的步进电机位置伺服控制系统快速原型设计”,是在实验一的基础上,采用任意控制结构(算法)设计步进电机角位置伺服控制器,逐步实现对稳态位置信号、周期性动态信号和随机动态信号的快速高精度跟踪。通过将dSPACE用于实际闭环控制系统的设计,可以使学生了解控制系统的分层设计方法,同时深化对所用控制算法的理解,巩固基于dSPACE的控制系统快速原型设计与硬件在回路仿真方法,为dSPACE的深入应用奠定基础。
2 实时模型与快速原型系统
2.1 被控对象工作原理
被控对象步进电机组件由二相步进电机、驱动器以及增量编码器构成。驱动器用于给步进电机供电,并通过输入的频率信号(PU+与PU-)和电平信号(DR+与DR-)分别控制步进电机的转速和转向,增量编码器通过联轴器与步进电机共轴连接,用于检测电机的角位置与转速。实验中,驱动器分频数设定为1600,增量编码器精度为2500线。
2.2 步进电机开环控制系统实时模型
采用自顶向下的层次性建模方法构造步进电机开环控制系统实时模型。开环控制系统的输入信号包括一个启停信号(逻辑信号);一个用于确定电机转向的电平信号(Boolean型或Double型数据,依赖于采用何种RTI模块产生该电平信号);一个用于确定电机转速的频率信号(Double型数据);一个用于使能增量编码器输出复位功能的使能信号(Boolean型数据)。输出信号包括增量编码器实测到的电机角位置(转)和角速度(转/秒)。步进电机开环控制系统顶层模型的输入、输出信号定义如表1所示,Simulink模型如图1所示。
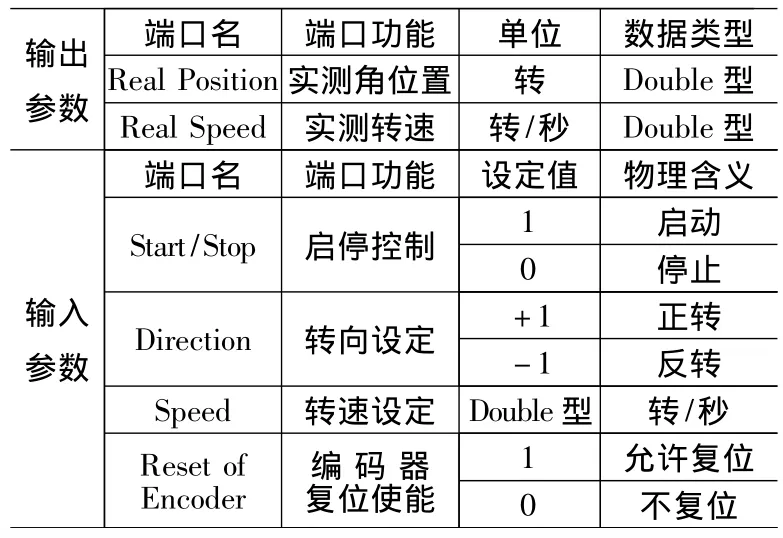
表1 步进电机开环控制系统实时模型端口定义

图1 步进电机开环控制系统顶层模型
图1中的StepMotor RealTime Model模块的算法设计如图2所示。其中,采用DAC模块产生电平信号控制电机正反转(-1对应-10V物理信号,+1对应+10V物理信号)。采用D2F模块产生频率信号控制电机转速,由于驱动器分频数为1600(即电机转动1圈需输入1600个脉冲),因此对单位为“转/秒”的频率设定值进行1600倍增益。电机启停控制端START/STOP设定为0时,D2F模块的输入信号为零,电机停止;反之当设定为1时,D2F模块的输入信号为经过增益变换后的频率设定值,此时步进电机按期望的转速运转。

图2 StepMotor RealTime Model模块的Simulink模型
如果直接采用了RTI中的增量编码器模块(ENCODER MASTER SETUP和ENC_POS)和硬件端口对增量编码器的输出信号进行采集,该模块直接得到当前采集到的脉冲数和每个采样周期(Ts)的脉冲变化量。由于增量编码器为2500线精度,对RTI模块的角位置输出做1/2500倍增益变换,将角位置单位变为“转”,角速度输出做1/(Ts×2500)倍增益变换,将角速度单位变为“转/秒”。
此外,还可以采用增量编码器软件中断复位模块(ENC_SW_INDEX和ENCODER SET POSITION)实现增量编码器输出的软件控制复位。建立实时模型时,若使用了增量编码器相关的RTI模块时,都需要使用ENCODER MASTER SETUP模块,且将其放置到根模型中。
为了使设计的模型能够适用于其它步进电机组件的控制与检测,将采样周期Ts、步进电机分频参数FP及增量编码器精度参数Precise以变量形式设定在模型中的相应模块中,并将StepMotor RealTime Model模块封装成子系统,针对不同的步进电机组件,只需设定上述相应的三个参数即可。
将图1所示的模型输入端口采用常数(Constant)模块替换,输出端口采用串联的单位增益(Gain)和终端(Terminator)模块替换,将其转化成实时模型。然后在Simulation菜单中打开Configuration Parameters窗口,完成如下三步仿真编译条件设置:
(1)在Solve选项页中,将Stop Time设置为inf,将Solve Option中 Type设置为 Fixed-step,将Fixedstep size设置为一个确切的仿真步长,如0.001(s);
(2)在Optimization选项页中,将Simulation and code generation中的Block reduction和Signal storage reuse两个选项勾选掉;
(3)在Real-Time Workshop选项页中,将System target file选择为所使用的平台,如 rti1103.tlc或rti1104.tlc,点击build按钮完成编译、连接和下载。
完成上述步骤后步进电机开环控制系统的实时代码已经运行在dSPACE系统中。根据实时模型中RTI模块的设定,正确连接步进电机组件与dSPACE平台对应的I/O端口,即可在ControlDesk中设计虚拟仪表控制台,选择恰当的虚拟仪表控件并与相应的模块正确关联,就可以实现对步进电机的启停、调速、正反转控制和电机角位置与转速的监控。鼓励学生尝试使用各种控件,设计美观、易用的个性化控制台,步进电机开环控制系统虚拟仪表控制台的一个设计实例如图3所示。这里的三组RadioButton控件分别与 START/STOP、Direction、Reset of Encoder端口的参数关联,用于控制步进电机的启停、转向、以及增量编码器的输出复位使能控制。Slider控件与Speed端口参数关联,用于控制步进电机的转速。PlotterArray和3个Display控件用于对比显示设定的期望转速和通过增量编码器模块采集的实测转速,以及实际的角位置曲线。

图3 步进电机开环控制系统虚拟仪表控制台
2.3 步进电机位置伺服控制系统实时模型
在开环控制实验的基础上,鼓励学生尝试设计任意结构及算法的控制器,以实现快速、稳定和高精度的位置伺服控制。但从实验的实施效果看,几乎所有学生都选择最常用的PID控制器。
基于图1所示的开环控制系统实时模型,采用Simulink的 Discrete库中的 Discrete PID Controller模块构建的步进电机位置伺服闭环控制系统实时模型如图4所示。其中,PID控制器以设定的期望位置信号(静态或动态信号)与实时模型采集到的角位置信号的偏差为输入,输出的控制信号经过取符号、限幅并求绝对值等变换后作用于步进电机实时模型。构建实时模型时,可以不精确地设计PID参数,而在ControlDesk中设计虚拟仪表控制台(如图5所示)时采用Slider控件与PID控制器参数关联对其进行在线调节,直接观察PID参数对控制效果的影响。依控制器设计指标难度,期望的角位置信号可以依次选取阶跃信号、正弦波或方波等周期性参数可调信号和随机性的手动输入信号等。

图4 步进电机闭环控制系统实时模型

图5 步进电机闭环控制系统虚拟仪表控制台
3 教学实践
通过两年来对应用实践单元的教学实践,学生在实验过程中暴露出如下主要问题。
(1)物理概念模糊,表现为讲不清模型中使用的模块在整个系统中的作用以及信号流向关系;
(2)信号量纲混乱,如用于获得误差信号的期望角位置信号与反馈回的角位置信号量纲不一致;
(3)没有模块化设计的概念,不会按照自顶向下或自底向上的原则进行算法设计,不懂得子系统创建与封装,模型结构混乱;
(4)对控制器(如PID)各环节的作用及其对应的物理概念、取值范围不清楚,参数调节盲目,难以评判参数调节的预期效果;
(5)理论与实践脱节,表现在理论上头头是道,实践中无从下手,实践动手能力亟待提高。
我们要求8学生在短短6个学时的时间内,既要理解实验目的和要求,还要了解被控对象与dSPACE相关模块的软硬件特性与用法,进而设计出能够满足控制要求的快速原型系统,确实是有难度的。现在,通过采用实验前讲解、合作组讨论和启发式答疑等多种教学手段,学生基本上可以按时保质的完成全部实验内容。部分学生在完成基本实验内容后,还可在教师的指导下对实验内容进行拓展,能力得到进一步锻炼。
通过应用实验单元“基于dSPACE的步进电机控制系统快速原型设计”的实践,使学生真正体会到可以通过快速构建面向真实被控对象控制的原型系统的方式对控制理论、原理、算法、结构等进行更加真实的验证,而不是停留在以往离线数值仿真验证层面上。
学生普遍反映,实验内容安排合理,难易适中,知识点涵盖全面,自身收获显著。学生感到以往理解模糊的物理概念终于搞清了,达到了理论与实践紧密联系的实验效果。
[1]恒润科技.dSPACE--基于Matlab/Simulink平台的实时快速原型及硬件在回路仿真的一体化解决途径[Z].恒润科技有限公司,2005
[2]谢海斌,沈林成等.关于高校加强计算机辅助技术教育的探讨[C].全国计算机新科技与计算机教育论文集(第17卷),2009.8(上集):17 -22.
[3]宋科,刘卫国等.控制系统硬件在回路实时仿真实验平台的dSPACE 实现[J].上海:微特电机,2008(4):28-31
[4]张浩.基于dSPACE的交流调速系统实验平台设计[J].南京:电气电子教学学报,2010.32(1):76 -79.
[5]潘峰,薛定宇.基于dSPACE半实物仿真技术的伺服控制研究与应用[J].北京:系统仿真学报,2004.16(5):936 -939
[6]卢子广,柴建云等.电力驱动系统实时控制虚拟实验平台[J].北京:中国电机工程学报,2003.23(4):
