舰船水压场实验的新方法*
2012-03-09
(海军工程大学理学院 武汉 430033)
0 引 言
舰船水压场是指航行舰船在水底引起的压力变化,它是舰船目标自身的特性之一,可为水中兵器探测和利用[1-2].由于实验室环境干扰少、船模可以准确定位,因而成为研究舰船水压场的重要手段[3-4],并作为检验舰船水压场理论模型的依据[5].船模实验根据相似理论在拖曳船池内进行,船模和实船之间除了满足几何相似外,还需满足重力相似准则.此时

式中:Δpm,Δps分别为船模和实船引起的扰动压力变化;CL为实船与船模的几何尺度比.
由于船模运动引起的压力变化微小,仅为实船的1/CL,为提高测量精度,实验采用高精度微差压传感器,通过水深静压平衡系统补偿背景压力,使得测量结果仅为船模运动引起的水底动压变化.采用上述直接法测量舰船水压场,由于变水深实验时需要不断精细地调整静压平衡系统,而且所测得的压力变化仅是标量,因此存在使用不便以及船模目标特性信息量不足等问题,为此又发展了舰船水压场的间接测量方法:即基于水底扰动速度的测量法和基于表面波高的测量法.所建立的2种测量方法通过实验验证效果良好,拓展了获取舰船水压场的新途径.
1 基于扰动速度测量方法
取动坐标系固结于船体,坐标原点o位于船体水线中心,z轴垂直向上,船头指向x轴负方向,y轴为横距方向.设船长为L,船速恒为V,水深恒为h,舰船运动引起的扰动速度分量为ux,uy,uz,则舰船水压场的压力系数为

式中:Cp=Δp(0.5ρV2);ρ为水密度;Δp 为动压变化,Δp=p-p∞,其中:p∞为静压强,p∞=ρgh.
理论分析表明,扰动速度分量ux,uy,uz≪V,忽略式(2)右边的高阶小量得

上式是依据测速法换算得到舰船水压场的理论模型.为验证该模型,研制了一套水底扰动速度与水底压力变化的联合测量系统,并进行了船池模型实验.船模A主要参数为:水线长2.52m,宽0.248m,吃水0.1m,排水量30.034kg,最大横截面积Smax=0.02m2.实验水深h=0.2 L,在拖曳船模经过的两侧y=±0.1 L的水底附近对应测点上,分别安装微差压传感器和点式流速仪,测量点距水底高度均为0.05m.
实验采用的Vectrino小威龙点式流速仪系挪威Nortek AS公司研制,其高分辨率探头利用声学多普勒原理,可以测量三维速度场.流速测量范围:±0.01,0.1,0.3,1,2,4m/s,可调;测量精度为测量值的±0.5%±1mm/s.安装时使测速仪探头的z1轴保持铅垂方向,x1轴和y1轴可以在水平面内旋转,当x1轴、y1轴与船体坐标系x轴、y轴相互平行时,定义x1与x轴之间的角度α=0°.图1是水深弗劳德数Frh=V/0.7时,船模通过测速仪测出的三个速度分量ux,uy,uz随时间的变化曲线,已转换成无因次距离.显然,在扰动速度3个分量中,ux变化的幅值最大,uy变化的幅值其次,uz因接近水底变化的幅值最小.由于ux,uy纵向通过特性曲线规律明显,因此其信号特征可为水中兵器利用.
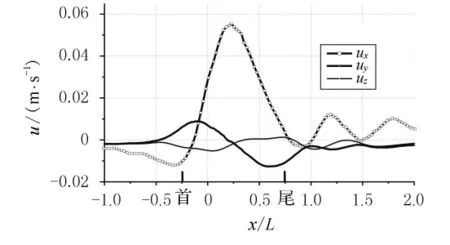
图1 扰动速度分量的变化
图2 是将所测的ux利用式(3)换算后再与通过直接测量压力得到的压力系数进行的比较,两者有较好的吻合,这说明通过测速方法换算得到舰船水压场是行之有效的.
在实际海洋中使用测速仪时,考虑到舰船航向相对于测速探头的不确定性,例如,设舰船上的x轴与测速仪探头的x1轴成α角,如图3所示.则此时测速仪测得的速度分量ux1,uy1和α=0°时的速度分量ux,uy之间应满足如下换算关系

在α=30°时实验测得的速度分量为ux1,uy1,通过式(4)计算得到α=0°的速度分量ux,uy,然后再与α=0°的实验结果进行对比,两者之间吻合良好,见图4.说明测速仪探头布放于水底后,通过一次船模实验结果即可换算得到其他航向的速度分量,这为舰船目标的探测、定位和实际应用提供了便利条件.
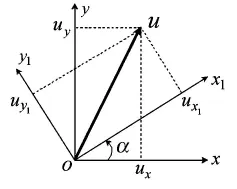
图3 速度分量的换算
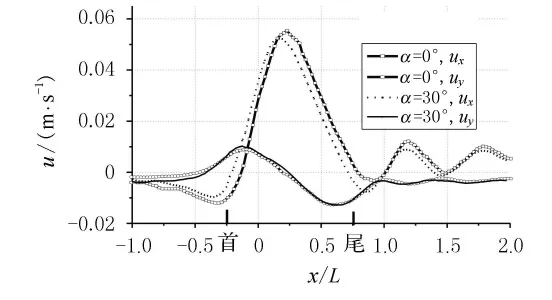
图4 速度分量的比较
对水面舰船通过相似理论分析,扰动速度之间应满足

式中:um,us分别为船模和实船引起的扰动速度分量.如果CL=64,则根据式(1)、(6)可知,船模的扰动压力为实船的1/64,船模的扰动速度为实船的1/8,可见相比较压力测量而言,在船池实验中采用速度测量法更为有利.
2 基于表面波高测量方法
描述一个固定点的水面波形可由一系列不同周期和不同随机初位相的余弦波迭加而成
式中:Ai=aicosθi;Bi= -aisinθi;ai=为波动水面相对于静水面的瞬时高度;ai,ωi,θi分 别为第i个组成波的振幅、角频率和初位相.
通过把实验测量的水面波形ζ(t)展开成傅里叶级数[6-7],得

式中:i=0,1,…,M;B0=0;ωi=2iπ/T;T=NΔT(Δt为采样时距,N 为总的样本个数);tn=nT/N=nΔt;取M=N/2以满足Nyquist采样定理.
利用式(8),(9)数值计算得到Ai,Bi后,再利用式(7)即可反演重构出由一系列余弦波组成的原来水面波形,基于线性叠加法进一步计算出航行舰船在水底引起的压力变化
式中:Kpi=1/cosh(kih),其中:ki为与ωi相对应的第i个组成波的波数.
对已知的角频率ωi,ki由如下色散关系确定

由式(7)~(11),构成了依据表面波高反演计算舰船引起水底压力变化的理论模型.为验证该模型,研制了一套表面波浪与水底压力联合测量系统.该系统由浪高仪、微差压传感器等构成.压力传感器布置于船模航线水底一侧,其铅垂线上方静水面处布置有相应的浪高仪,可以同时测量表面波高和水底压力变化.LGY-IA型浪高仪由东升激光技术应用研究所研制,属钽丝电容式传感器.钽丝传感器总长48cm,浪高测量范围:0~+20cm.实验船模B主要参数为:水线长2.4m;宽0.48m;吃水0.13m;排水量66.0kg;最大横截面积Smax=0.044m2.
船模实验在武汉理工大学交通学院拖曳船池内进行.图5、图7是船模在静水中航行时所测量的水面兴波和水底压力变化曲线,横坐标为时间历程t,s,纵坐标为水面波形ζ和水底压力变化pb(为便于对比,单位均采用mmH2O).图5中Frh=0.553处于亚临界航速,船模出现在t=3~5s之间.图7中Frh=1.80处于超临界航速,船模出现在t=0.9~1.5s之间.根据图5、图7水面波形测量结果通过式(7)~(10)反演计算后,再与船模引起的水底压力变化实验结果进行对比,分别由图6、图8可见两者吻合较好.
图9是船模在非规则波中航行时所测量的水面波形和水底压力变化曲线,船模航行在t=13s附近遭遇波浪,此时水面波形和水底压力均发生大幅度变化.图10是根据图9的水面波形测量结果,通过式(7)~(10)计算得到的水底压力变化与测量结果之间的比较.尽管水面波形变化剧烈,但水底压力计算结果与实验结果仍然吻合较好.说明基于表面波高换算舰船水压场的方法既适用于舰船在静水中航行,也适用于舰船在波浪中航行,既适用于舰船以亚临界速度航行,也适用于舰船以超临界速度航行.

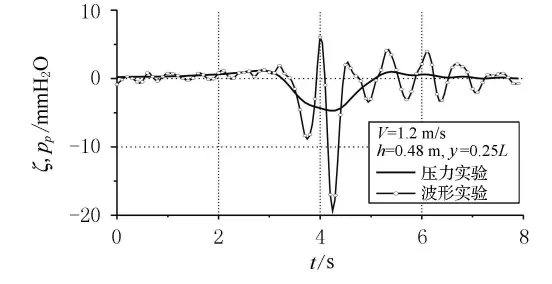
图5 船模兴波与水底压力变化测量结果
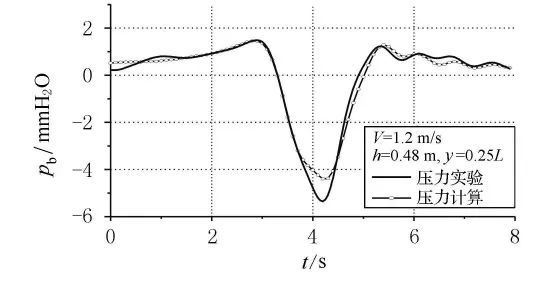
图6 船模水底压力变化测量与计算结果比较
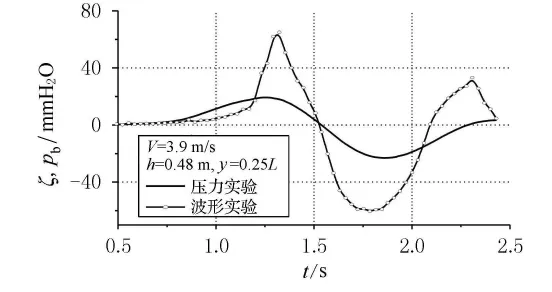
图7 船模兴波与水底压力变化测量结果
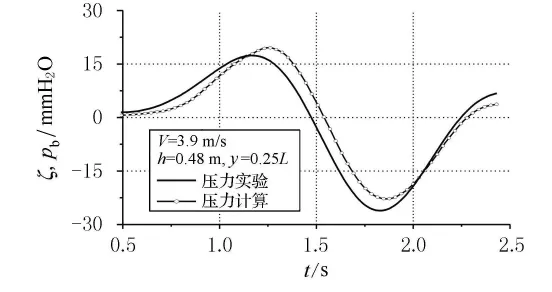
图8 船模水底压力变化测量与计算结果比较
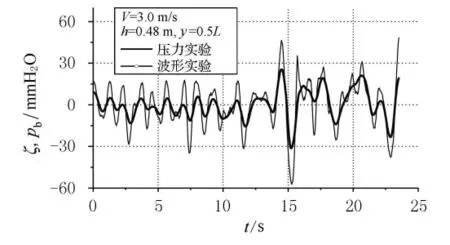
图9 水面波形与水底压力变化测量结果
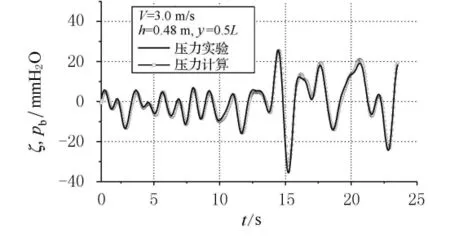
图10 水底压力变化测量与计算结果比较
3 结束语
传统的压力直接测量方法不需换算,通过实验即可直接得到舰船水压场.基于扰动速度的间接测量方法利用纵向扰动速度分量可以换算得到舰船水压场,而横向扰动速度分量可以提供舰船目标的更多信息,有利于舰船的识别和定位.基于表面波高的测量方法,仅需在水面安装调试浪高测量系统,相比较压力直接测量法和扰动速度测量法具有更加便利的优点.本文在压力直接测量法基础上,进一步研制了舰船速度-压力场和舰船浪高-压力场两套联合测试系统,建立了基于扰动速度和表面波高间接获取舰船水压场的理论反演模型,通过船模实验验证了所提出的两种方法效果良好,为舰船水压场的获取开辟了新的技术途径.
[1]Kozaczka E,Milanowski L.Experimental investigations of hydrodynamic pressure produced by a moving ship[C]//Proceedings ofⅫ Symposium on Hydroacoustics,Gdynia:Jurata,1995.
[2]Kozaczka E,Milanowski L,Komorowski A,et al.The application of the ship hydrodynamic field distribution for its localization[C]//UDT96Wembley Conference & Exhibition Centre,London,UK.2-4,July,1996:394-397.
[3]Suzuki K.New evaluation formulate for the sea bottom pressure caused by ships[J].Kansai Soc.N.A.,1992,218(9):181-191.
[4]张志宏,顾建农,郑学龄,等.有限水深船舶水压场的实验研究[J].水动力学研究与进展,2002(6):9-14.
[5]张志宏,顾建农.浅水高速船舶引起的波浪和压力场研究.船舶力学[J].2006,10(2):15-22.
[6]俞聿修.随机波浪及其工程应用[M].大连:大连理工大学出版社,2000.
[7]张万平,张志宏,顾建农.表面波引起的水底压力脉动[J].武汉理工大学学报:交通科学与工程版,2005,29(1):87-90.
