前馈结构DASA抑制器在抑制PIO中的应用研究
2012-03-03李颖晖朱广东曹启蒙徐浩军孟捷
李颖晖,朱广东,曹启蒙,徐浩军,孟捷
(空军工程大学工程学院,陕西西安 710038)
引言
随着航空技术的迅猛发展,高增益、全权限电传飞行控制系统在先进战斗机与大型运输机上得到广泛应用,非线性驾驶员诱发振荡[1](Pilot Induced Oscillation,PIO)现象不断增加,已造成多起飞行事故,严重威胁飞行安全。据报道,JAS-39,F-22,Su-27,X-31和YF-12A等都曾出现过PIO引发的坠机事故[2]。20世纪90年代初,JAS-39曾发生两起由PIO引起的坠机事故;1992年4月,F-22在接地前放弃着陆任务后发生PIO[3]。因此,对PIO抑制方法的研究显得尤为重要。
对非线性PIO的抑制方法,国内外展开了广泛的研究工作。国外主要从控制律和作动器本身来考虑,采用提高舵机系统的舵机速率,在一定程度上能抑制PIO现象,但需要改变舵机尺寸和重量,因此未能广泛应用[4]。目前,广泛采用的方法是运用补偿技术抑制非线性Ⅱ型PIO的发生。补偿方法之一是减少驾驶杆命令增益或减小反馈控制增益,但会使飞机飞行品质恶化,驾驶高增益飞机飞行如同驾驶运输机;另一种方法是当速率限制被激活时对系统相位进行补偿,设计相位补偿系统有逻辑条件法和连续信号法。SAAB发展了相位补偿技术以克服JAS-39Gripen飞机与速率限制相关的缺陷,并获得了成功[5]。国内对PIO的研究仍处于理解应用阶段,对PIO抑制方法的研究并不系统,未建立类似于国外的PIO评估数据库,与国外相比仍存在差距。
本文研究的DASA(Dead Area Stability Augmentation)抑制器采取相位补偿,是基于连续信号法设计的前馈结构抑制器[6]。首先从DASA抑制器结构入手并对抑制器本体的时域特性、相位补偿特性进行研究,然后仿真研究其抑制Ⅱ型PIO的效能,最后在地面飞行模拟器上进行验证。该研究能够为已有成型飞行器的Ⅱ型PIO抑制器设计提供参考,具有一定的工程应用价值。
1 DASA开环特性分析
1.1 DASA抑制器的结构
DASA抑制器结构如图1所示,该系统由一个速率限制和两个滤波器组成前馈结构。图中,u为输入信号,y为抑制器输出信号。该抑制器中速率限制器未饱和时,系统允许输入信号无衰减地通过;速率限制器饱和时输入信号会被衰减,同时速率降低,补偿环节中的死区环节的间隔为速率上下限之间的间隔。
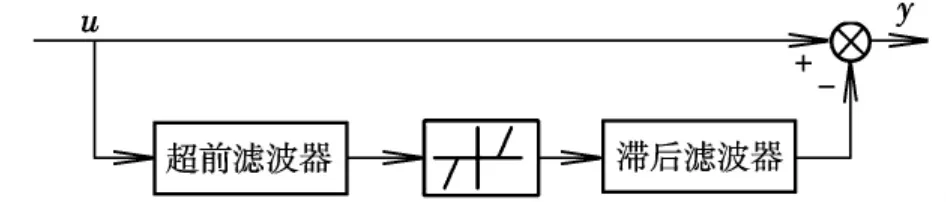
图1 DASA抑制器结构图
1.2 DASA抑制器频域特性分析
由DASA抑制器结构可知,该抑制器为非线性结构,需要运用描述函数法来研究抑制器的频率特性。描述函数取决于输入信号的频率ω和幅值C,当输入信号为u=C sin(ωt),输出信号为y(t)时,描述函数YN(C,ω)为:

式中,a1,b1为傅里叶系数;c1,φ分别为描述函数YN(C,ω)的幅值与相位。
进行频率特性计算时,速率限制VL的值设为±1 rad/s;抑制器中的超前滤波器为s/(0.05s+1),滞后滤波器为1/(s+1)。
本文仅对驾驶员关心的频率范围(0.1~10 rad/s)进行研究。当频率低于0.1 rad/s,周期已经长到足以让驾驶员操纵干预修正;当频率高于10 rad/s,相当于产生了180°相位滞后,也仅仅产生小于0.3 s的时间延迟。图2为DASA抑制器的伯德图,图中实线表示DASA抑制器,虚线表示速率限制器。由图2可知,随着速率限制与输入信号幅值之比m/C的减小,抑制器的相位补偿量较显著,补偿起始频率值也变小。
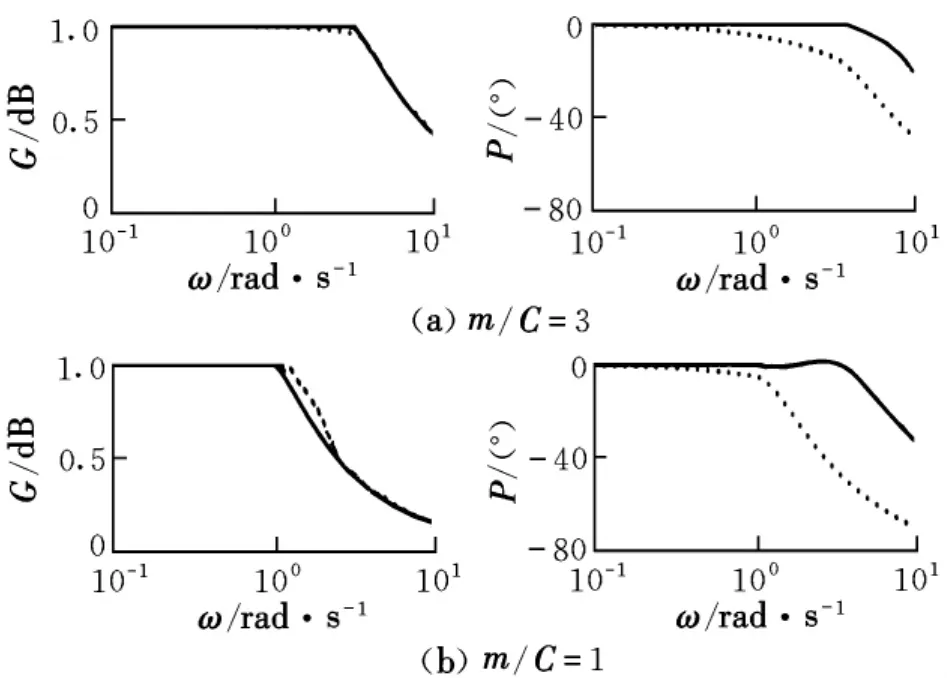
图2 DASA抑制器的伯德图
1.3 抑制器时域特性分析
图3为输入信号u=sin(3t),速率限制VL=±1 rad/s情况下的DASA抑制器的时间响应。图中,正弦输入信号和无补偿速率限制器三角输出信号均以虚线表示,DASA抑制器的时间响应如实线所示。由图3可发现,DASA抑制器有少许时延,表明抑制器具有一定的相位补偿能力,能够有效减少延迟时间。

图3 抑制器对u=sin(3t)的时间响应
若输入信号为非对称、无稳态误差的偏差信号时,将使驾驶员操纵受到干扰,从而驾驶员会给出较低的飞行品质评价。图4为偏差输入信号,速率限制VL=±1 rad/s时的DASA抑制器的时间响应。图中,正弦输入信号和无补偿速率限制器三角输出信号均以虚线表示,DASA抑制器的时间响应如实线所示。由图4可以看出,对偏差输入信号跟踪时,DASA抑制器能有效消除输入信号偏差。
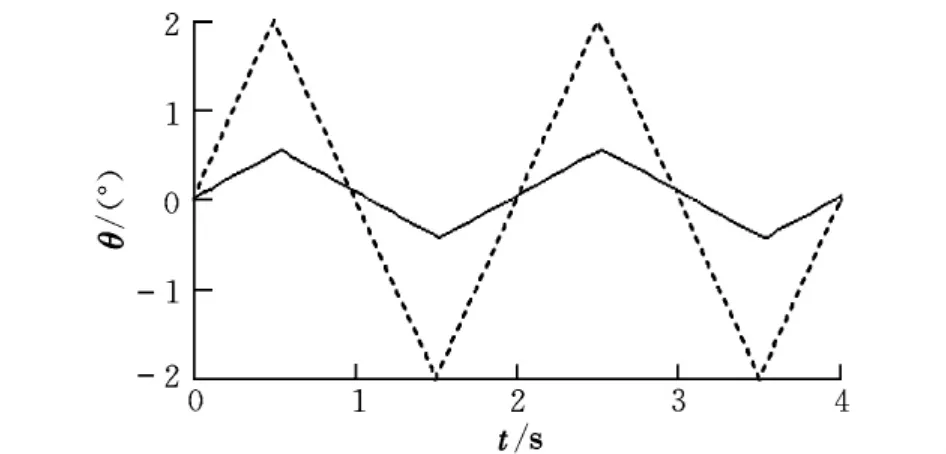
图4 抑制器对偏差输入信号的时间响应
2 DASA抑制器效能研究
2.1 人机闭环系统模型
人机闭环系统模型包括飞行器小扰动模型、Neal-Smith驾驶员模型、速率限制舵机模型、位置限制模型和DASA抑制器模型,如图5所示。
2.1.1飞机模型
飞行器的小扰动模型为:

式中,x=[v,α,q,θ]T,其中 v为前向速度,α 为迎角,q 为俯仰角速度,θ为俯仰角;u=[δe]T,其中 δe为升降舵偏角;y=[v,α,q,θ]T。
本文研究1号和2号两种不同的飞机模型。
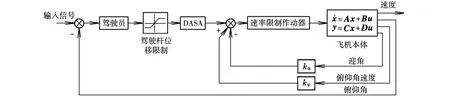
图5 含DASA抑制器的人机闭环系统
1号飞机的A,B,C和D矩阵如下:
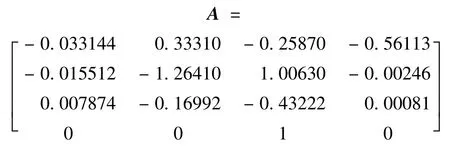
2号飞机的A矩阵如下所示(B,C和D矩阵与1号飞机相同):
1号飞机本体是静不稳定的,倍幅时间为2.31 s,增稳后可达1级飞行品质;2号飞机本体的飞行品质为3级飞行品质,增稳后可达1级飞行品质。1号飞机本体的稳定性弱于2号飞机。当速率限制舵机饱和时,1号和2号飞机均有PIO趋势,1号飞机在PIO中将有发散趋势。
2.1.2驾驶员模型
本文选择Neal-Smith驾驶员模型展开研究,采用满足MIL-HDBK 1797A[7]中1级飞行品质的驾驶员模型。
2.2 正弦追踪任务
正弦追踪任务的目的为发现相位滞后,正弦追踪任务对1号飞机仿真如图6所示。图中,点线为输入的正弦追踪任务,虚线为未加抑制器的人机闭环系统仿真结果,实线为加入DASA抑制器后的俯仰角输出。由图中可以看出,DASA抑制器消除了飞机的持续振荡,使俯仰角输出信号能大致追踪到输入信号。
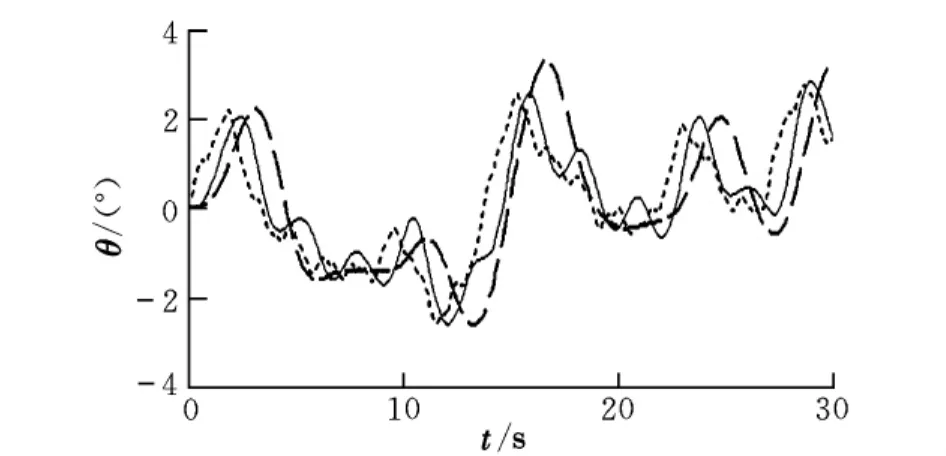
图6 正弦追踪任务时间响应
2.3 离散俯仰追踪任务
为测试抑制器的性能,在测试中采用MIL-STD-1797A中规定的离散俯仰追踪任务。在离散俯仰追踪任务中,对2号飞机仿真结果如图7所示。图中,点线为离散俯仰追踪任务,虚线为未加抑制器的飞机俯仰角输出,实线为加入DASA抑制器后的俯仰角输出。由图7可知,未加抑制器的2号飞机出现了持续振荡,加入DASA后输出信号显示DASA抑制器可以消除飞机的持续振荡,在第8 s成功追踪输入信号,但在8 s以前的调节过程有大幅振荡出现,且在追踪过程中第25 s、第46 s也出现了幅值衰减的小幅振荡。由此可得DASA抑制器对Ⅱ型PIO有一定的抑制作用。
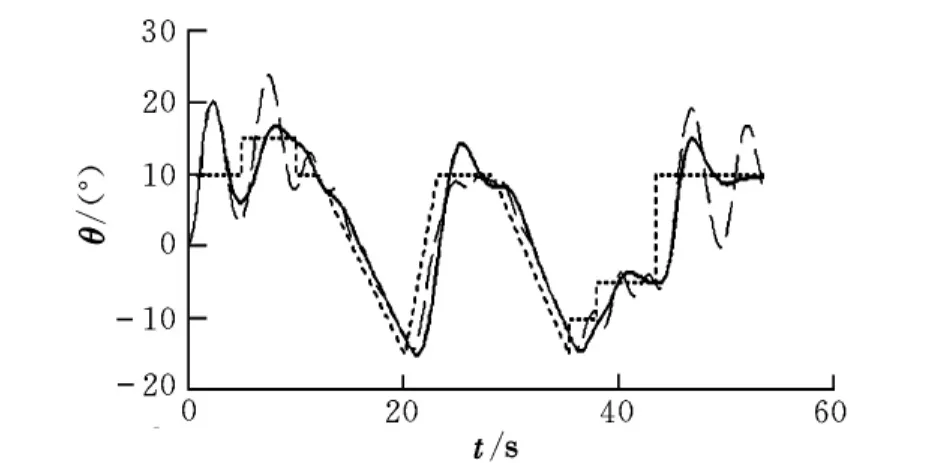
图7 离散俯仰追踪时间响应
通过正弦追踪任务、离散俯仰追踪任务仿真研究,可以看出DASA抑制器能够起到抑制PIO的作用,消除飞机振荡,能对输入信号进行追踪。
3 DASA抑制器抑制效能地面飞行模拟试验
3.1 飞行员评估
飞行品质评估是飞机及飞行控制系统研制过程中的一个重要组成部分。PIO问题是飞行品质问题的一部分,在测试Ⅱ型PIO抑制器的性能时也需评估其对飞机飞行品质的影响,因此在评估中采用C-H标准[8]进行评分。
3.2 试验计划
研究试验是在国防科技重点实验室的地面飞行模拟器上进行,该模拟器是研究型地面飞行模拟器,可以开展Ⅱ型PIO抑制器性能的研究。模拟飞行是由两名飞行员在地面飞行模拟器上进行。对1号飞机进行正弦追踪任务仿真,对2号飞机进行离散俯仰追踪任务仿真。飞行初始条件统一设为高度8 500 m,飞行速度760 m/s。
3.3 试验结果
1号飞机进行正弦追踪任务仿真无抑制器时,图8为飞行员a的飞行结果,图9为飞行员b的飞行结果。飞行员a给出的C-H评分为5分,飞行员b给出的C-H评分为6分。该评分说明需要对飞机进行必要的改进,观察两图也可发现在试验过程中均出现了较大幅度的振荡。

图8 未补偿离散俯仰追踪时间历程1

图9 未补偿离散俯仰追踪时间历程2
1号飞机进行正弦追踪任务仿真加入DASA抑制器,DASA抑制器各参数值设置同第2节数值仿真中的设置。图10为飞行员a的飞行结果,图11为飞行员b的飞行结果。飞行员a给出的C-H评分为4分,飞行员b给出的C-H评分为3.5分。该评分说明仍需对飞机进行必要的改进,但与无抑制器时相比对飞行品质有明显改善。
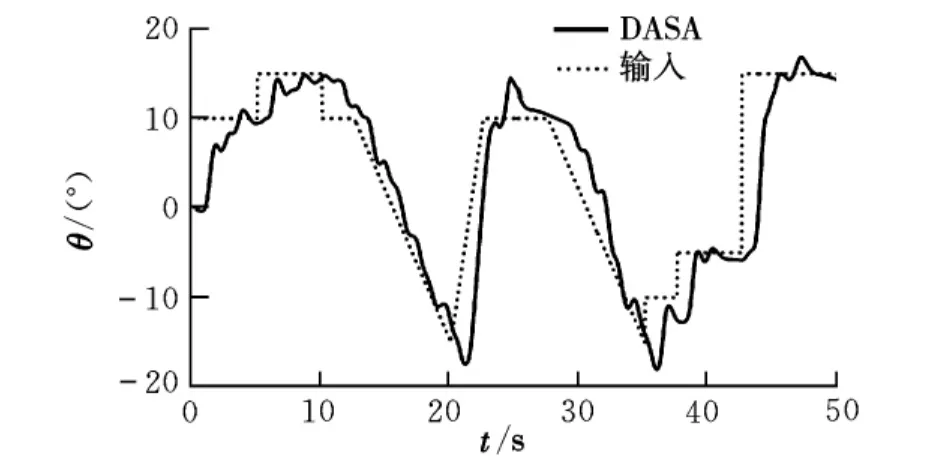
图10 DASA抑制后时间历程1
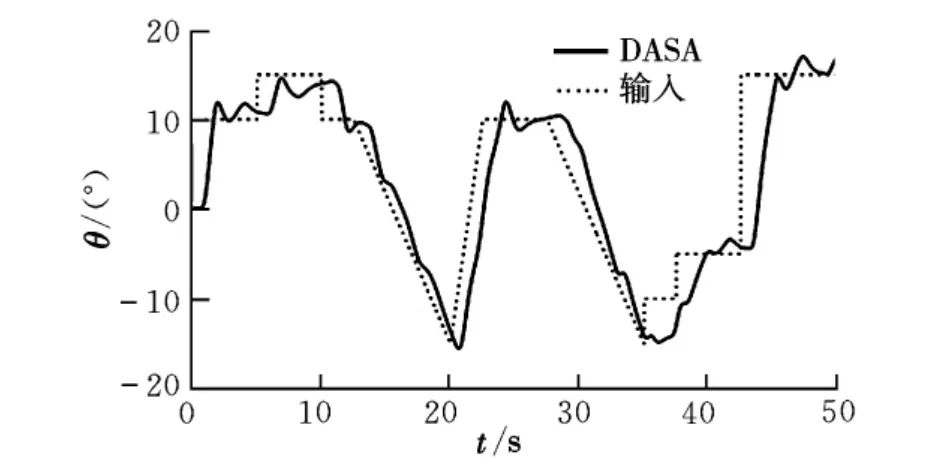
图11 DASA抑制后时间历程2
2号飞机进行离散俯仰追踪任务无抑制器时,图12为飞行员a飞行结果,图13为飞行员b飞行结果。飞行员a给出的C-H评分为4分,飞行员b给出的C-H评分为4.5分。该评分说明飞机有改进的必要。与图6的数值仿真结果相比较,发现飞机俯仰角没有发生大幅振荡。说明人的自适应特性能够最大程度地改善人机闭环系统性能,这也是单纯凭数学模拟计算达不到的。
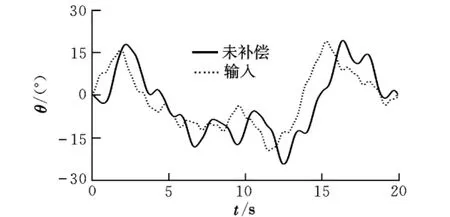
图12 未补偿正弦追踪时间历程1

图13 未补偿正弦追踪时间历程2
2号飞机进行离散俯仰追踪任务仿真加入DASA抑制器时,图14为飞行员a的飞行结果,图15为飞行员b的飞行结果。飞行员a给出的C-H评分为2.5分,飞行员b给出的C-H评分为3分。该评分说明DASA抑制器对飞机飞行品质有一定改善,但改善不明显,仍有小幅振荡。
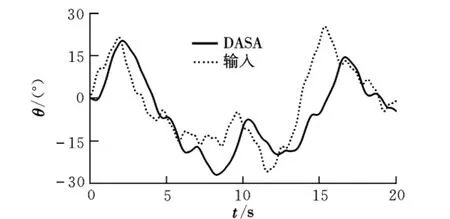
图14 抑制后的正弦追踪时间历程1
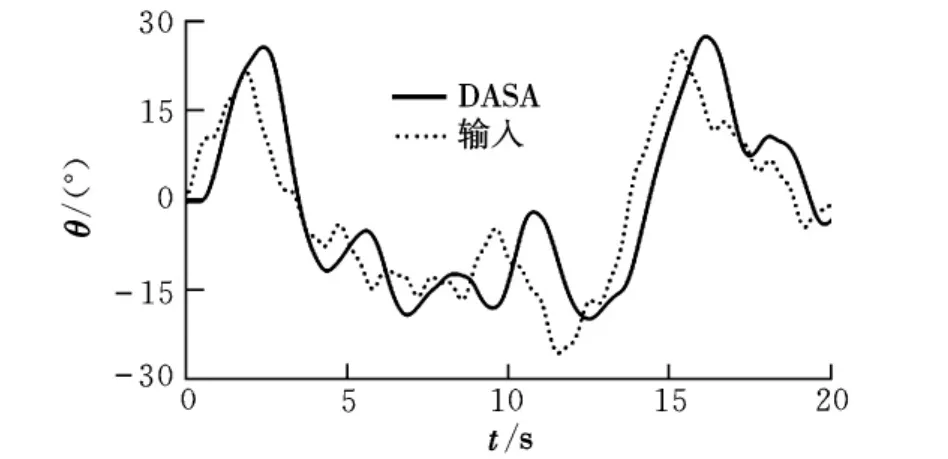
图15 抑制后的正弦追踪时间历程2
离散俯仰追踪任务的C-H评分分值高于正弦追踪任务的C-H评分分值,说明正弦追踪任务中运动目标的追踪难度更大,正弦追踪任务较离散俯仰追踪任务更易发现飞机的PIO趋势。
将试验结果与上一节的数值仿真结果相比较,发现试验评估结果与数值仿真结果相一致。说明DASA抑制器对抑制Ⅱ型PIO的发生,改善飞机的飞行品质有一定的效果。
4 结束语
本文在研究前馈结构DASA抑制器的基础上,将其应用到Ⅱ型PIO的抑制中,从时域仿真和地面飞行模拟试验两方面对抑制器的抑制效能进行了验证。通过地面飞行模拟试验取得了与数值仿真相一致的结论:DASA抑制器可以改善飞机飞行品质,但仍需对抑制器进行研究并加以改进,才能对Ⅱ型PIO进行有效抑制。
[1] Defense Department.MIL-STD-1797 Flying qualities of piloted aircraft[S].ASD/ENES,Wright Patterson AFB OH,1987.
[2] McRuer D T.Aviation safety and pilot control,understanding and preventing unfavorable pilot-vehicle interactions[M].Washington D C:National Academy Press,1997.
[3] 孟捷.非线性PIO机理及其预测与抑制方法研究[D].西安:空军工程大学工程学院,2010.
[4] Chapa M J.A nonlinear pre-filter to prevent departure and/or pilot induced oscillations(PIO)due to actuator rate limiting[D].USA:Air Force Institute of Technology,1999.
[5] Mobarg,Milton,Lowell Lykken.JAS-39 gripe flight control system status report[R].Technical Report,SAABAircraft Division and Lear ASTRO Corporation,1991.
[6] Gatley S L,Turner M C,Ian Postlethwaite,et al.A comparison of rate-limit compensation schemes for pilot-induced-oscillation avoidance[J].Aerospace Science and Technology,2006,10:37-47.
[7] Anon.MIL-STD-1797A Military standard:Flying qualities of piloted airplanes[S].W right-Patterson AFB,1990.
[8] Anon.军用规范——有人驾驶飞机的飞行品质[M].西安:飞行力学杂志社,1985.
