单轴稳定平台控制系统及其电磁干扰防护
2012-02-22康永泰袁国珍
康永泰,齐 蓉,袁国珍
(西北工业大学,陕西西安710129)
1 稳定平台控制器的总体设计
1.1 设计背景及意义
稳定平台技术在各国一直是经久不衰的研究课题,在军事、民用工业上都有着广泛的应用[1]。单轴稳定平台控制器用于当载体在空间旋转时稳定载体内的平台负载,同时输出载体相对平台的角度及角速度信号。理想的单轴稳定平台系统,其内部平台是不会跟随外部载体转动而转动的,然而实际中,由于支撑轴的摩擦力存在,当外部载体转动时,支撑轴的摩擦力矩带动平台随着载体同方向转动。为了克服不均匀负载以及支撑轴承带来的摩擦力矩,我们需要一个力矩电机来产生抵消台体旋转的力矩。本文采用空间矢量脉宽调制技术,驱动永磁同步电动机实现上述功能,并对平台的硬件电磁隔离设计进行了详尽的说明和验证对比。
1.2 控制器的总体框架设计
伺服控制器的中心任务是控制伺服电机以一定的性能指标快速、精确的运动。因此,系统本质上就是一个高精度位置系统。伺服控制器的总体组成框图如图1所示,主要由伺服电动机、伺服控制器、磁电编码器、IMU(或模拟IMU)等构成。
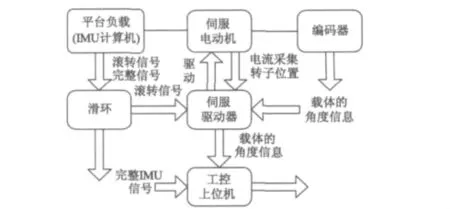
图1 伺服控制系统组成框图
2 稳定平台的硬件设计
2.1 硬件设计的总体结构
伺服控制系统硬件电路主要由控制电路及功率驱动电路组成,外加其它辅助电路。控制电路主要包括DSP最小系统电路、位置检测电路、通讯电路、隔离电路等,主要实现信息采集及SVPWM控制策略实现。功率电路由驱动电路、功率MOSFET、电流采样及保护电路构成,完成电机驱动控制。伺服控制器的硬件结构框图如图2所示。
2.2 DSP最小电路系统设计
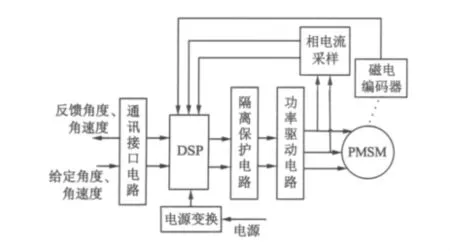
图2 稳定平台系统硬件结构框图
系统构造了一个DSP最小电路系统,使控制回路能正常工作,如图3所示。系统中选用电源芯片TPS70351作为DSP电源转换芯片,它拥有上电时序功能,保证DSP TMS320F2812的I/O供电先于内核供电。为提高供电的质量,在芯片的电源输入管脚附近都使用了0.1 μF 的电容进行滤波[2]。
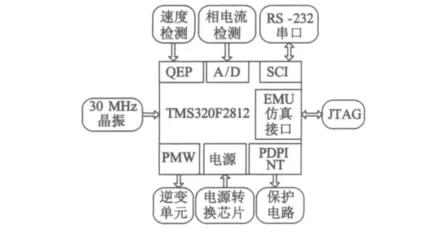
图3 DSP最小系统框图
2.3 电机驱动电路设计
本控制器采用事件管理器EVB产生六路SVPWM波经过隔离放大形成对电机的驱动信号,通过功率驱动芯片IR2103S放大驱动,由IRFR3412构成的逆变电路从而提供对电机的驱动信号。
2.4 相电流采样电路
电机电流环的补偿和矢量控制下电机的驱动需要对电机相电流采样。由于本系统采用的永磁同步电动机是星形连接方式,故其A、B、C三相电流之和为零,因此只需采样两相电流。检测相电流的任务由线性电流传感器ACS712完成。ACS712的输出端先经过一个减法器限压,然后经过巴特沃斯低通二阶滤波。另外,为了防止意外产生的过电流干扰,将滤波后的信号送入A/D采样单元之前要经过已经设置好的保护电路。
2.5 电源变换电路
外部提供对地隔离的+27 V和+5 V电源。+27 V提供母线电压,经电源变换后为驱动芯片IR2103和隔离芯片ADUM1401一侧提供电源;+5 V经电源变换后为DSP I/O、DSP内核(数字)及电流采样芯片ACS712等提供电源。
2.6 通讯接口电路
为平台采用惯性测量单元(IMU)提供伺服控制系统的给定信号。由于可以用IMU直接对平台的角加速度进行测量,从而对测得的角加速度进行一次积分可以得到平台的角速度,再进行第二次积分就可以得到了平台的角位置。平台的伺服通讯信号经由串口RS422传送。由芯片SN74CBTD3305C构成的电平转换电路,将DSP输出3.3 V转换为5 V供给由MAX488EESA构成的专用通讯电路,完成整个通讯接口电路的功能。
3 稳定平台控制器的软件设计
在软件方面平台采用TI公司的集成编译环境CCS3.3,使用混合语言(C语言+汇编语言)进行编程,并采用模块化的设计思想。
系统总体结构如图4所示。系统软件主要由两部分构成:主程序模块和中断服务处理程序模块,每个程序模块又包含若干子程序模块。主程序模块在完成系统的初始化(系统寄存器的设置和初始化变量)工作后进入循环等待中断状态;本系统的中断服务处理程序是由SCI中断和定时器3下溢中断两部分构成:其中设定定时器3下溢中断作为系统的主中断,依次完成对系统的电流环、速度环和位置环的三闭环控制;而SCI中断仅用于进行和上位机进行通讯,传递平台角度、角速度信息及控制指令。
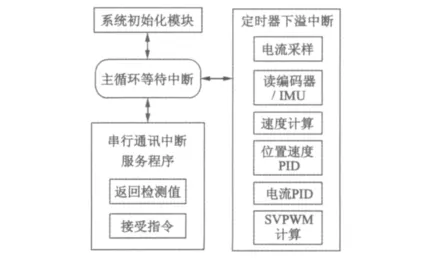
图4 系统软件总体结构
本系统采用了位置、速度和电流三闭环控制,为了防止控制时过饱和现象发生降低控制的实时性,本文采用了具有积分分离功能、抗积分饱功能的PID控制器或分段PID控制等改进型算法,使控制性能达到了良好的效果。
4 稳定平台的抗干扰技术
4.1 电磁干扰产生途径
在单轴稳定平台控制系统中,各种电磁干扰(EMI)是相当多的,电磁干扰的产生需要具备三个条件:一是干扰源,二是干扰耦合途径,三是干扰敏感设备[3]。上述三者构成了电磁干扰的三个基本要素。系统中电机、逆变器中的开关元件以及外部其它设备会产生各种干扰信号,并把干扰带到系统中去,通常情况下这些干扰信号会通过传导干扰和辐射干扰两种常见的方式传递到控制电路中,使电路或程序受到干扰,产生紊乱。
4.2 抗干扰基本措施
在硬件设计中,本系统干扰的抑制主要考虑了加去耦电路、截断干扰渠道、减小设备体积几方面。
首先控制板上,采用Analog Devices公司的ADUM1401对六路SVPWM波进行隔离,其内部的噪声抑制电路可提供高于25 kV/μs的共模抑制;为减小PCB板体积,采用四层板设计,并对电源地进行了分割以减少干扰;数字地与模拟地之间通过电感单点连接减少干扰。
其次,对于整个稳定平台的供电,外部电源经若干隔离变压器的隔离才分别供给平台、IMU以及工控上位机,并且供给控制板的电源线均采用屏蔽线;工控上位机的电源线和信号线分路走线。
以上措施都是为了避免电磁干扰的影响而采取的抗电磁干扰措施。
4.3 编码器干扰及解决方案
对于辐射干扰和电磁耦合性干扰,切断其传播途径的最有效措施是屏蔽[4]。我们采用的是金属壳屏蔽,但金属屏蔽也有其缺点,当被屏蔽干扰信号的波长正好与金属壳的某个尺寸接近的时候,金属壳很容易会变成一个大谐振腔,即电磁波会在金属壳内来回反射,并会产生互相迭加,如图5所示。当电机尾部的磁电编码器及控制板装入试验台外部拖动电机的尾部的封闭的金属舱体中时,磁电编码器产生的电磁场产生的电磁波经金属舱体反射震荡对控制板上的采样电流产生严重的干扰,导致控制效果很差,远不能达到指标要求,为此设计了一种由纯铁作为屏蔽材料打造的能紧包编码器的屏蔽外罩,很好地隔离干扰源,控制效果得到大大提高。
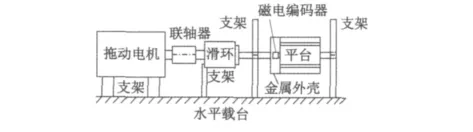
图5 平台的试验台
以下为几组编码器加屏蔽前后实际实验过程中得到的平台IMU传回数据的对比,如图6~图9所示。
在有强烈的电磁干扰的情况下(磁电编码器未加屏蔽罩),稳定平台运行的结果如图6及图8所示。曲线1为既有高转速又有低转速且运行方式和实际情况最为接近的曲线,曲线2为载体匀速5 r/s时的运行曲线,与对应的图7和图9相比较可以发现,与在屏蔽了电磁干扰以后得到的结果,要远好于未加屏蔽罩前的运行效果,可以发现磁电编码器在入舱之后产生的电磁干扰的影响十分之大,使由IMU获得的角度偏差和角速度偏差严重超出指标。针对平台中可能出现的电磁干扰情况进行了有效的预防,同时通过对其中一种特殊情况下电磁干扰的分析解决,说明了电磁干扰的广泛性和突发性,要仔细排查。
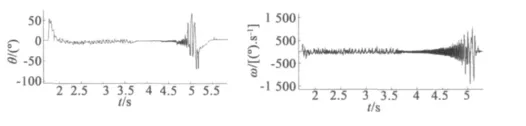
图6 编码器未屏蔽曲线1
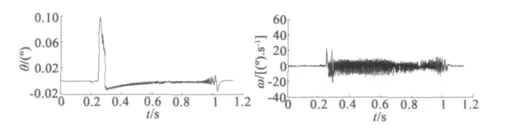
图7 编码器屏蔽曲线1
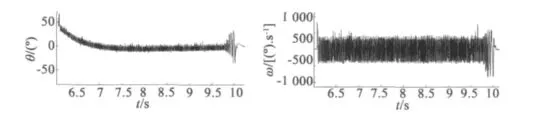
图8 编码器未屏蔽曲线2
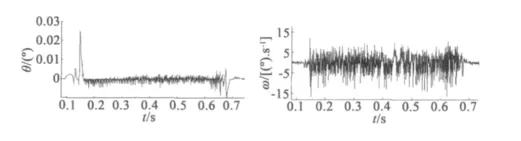
图9 编码器屏蔽曲线2
5 结 语
本文设计了单轴稳定平台伺服控制系统,结合工程实践与技术指标,其伺服系统硬件及软件的性能优异,结构整齐划一。针对系统中可能出现的电磁干扰需要全面地考虑防护,以防止造成严重的影响。
[1] 吴树平.车载三轴稳定平台控制系统的研制[D].南京理工大学,2007.
[2] 苏奎峰,吕强.TMS320X281xDSP原理及C程序开发[M].北京:北京航空航天大学出版社,2008.
[3] 钱照明,陈恒林.电力电子装置电磁兼容研究最新进展[J].电工技术学报,2007,22(7):1-11.
[4] 王宏,陈怀春.PWM控制系统中的电磁兼容设计[J].电子工程师,2004,30(11):7-9.
