对抗条件下浮标基水声定位技术研究
2012-02-22付进李利梁国龙马巍
付进,李利,梁国龙,马巍
(1.哈尔滨工程大学水声技术国防科技重点实验室,黑龙江哈尔滨150001;2.大连测控技术研究所,辽宁 大连116013)
0 引言
在水下靶场测控中,浮标基定位系统可用于对水下作战武器的定位跟踪,为武器的试验演练和战技性能评价提供依据。当定位系统利用待测目标的水声侦察信号对其进行定位时,直达声时延测量精度是保证系统定位精度的关键。在非水声对抗条件下,检测到水声侦察信号及其多途序列后,采用分群开窗机制可准确提取直达声,再利用其时延信息即可实现对待测目标的精确定位[1-4]。
在水声对抗条件下,对抗器材在接收到待测目标的侦察信号后,对其进行波形分析和参数估计,进而模拟目标特征并发出回波信号[5-7]。此时,水声侦察信号与模拟回波信号之间的差别不大,而且二者多途序列之间存在复杂的叠加关系,很难正确选取侦察信号的直达声,利用传统的分群开窗机制选择首脉冲,容易出现错将模拟回波信号当作水声侦察信号进行解算的情况,此时定位效果严重下降,目前尚未见到解决这个问题的相关报道。针对这种情况,本文提出了一种基于时延匹配及信号多普勒的侦察信号辨识方法,可在受模拟回波信号干扰的脉冲序列中正确选取侦察信号的直达声,进而实现在水声对抗条件下对待测目标的准确定位。
1 浮标基定位系统工作态势
在对抗条件下,浮标基定位系统的典型工作态势如图1所示:此时,浮标接收到的除了待测目标发射的水声侦察信号外,还有对抗器材发射的模拟回波信号,两种信号在特征上差别不大,很难区分,若错将回波信号当作侦察信号解算,将对定位结果产生很大的影响,甚至不能正确定位。
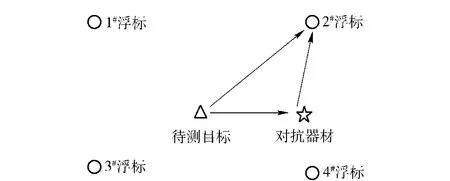
图1 浮标阵工作态势Fig.1 Buoy array working situation
2 侦察信号与模拟回波之间的关系
2.1 两种信号直达声之间的时延差
浮标接收到两种信号即水声侦察信号与模拟回波,它们的时延差主要和浮标与对抗器材的距离及它们与待测目标的相对位置有关。对该时延差的分布情况进行仿真,仿真条件:在平面直角坐标系中,浮标位置(-500,0)m;对抗器材位置(500,0)m,待测目标在平面内变化,对应每个位置计算时延差,仿真结果如图2所示。

图2 两种信号的时延差Fig.2 Time-delay of two signals
图中,左面的小圆为浮标,右面的五角星为对抗器材,时延差单位为毫秒。由仿真结果可以得到以下结论:
1)时延差的最大值、最小值仅和浮标与对抗器材的距离有关,最大值为待测目标在对抗器材与浮标的延长线上,大小为2d/C 秒(d 为对抗器材与浮标间距,C 为声速),最小值为待测目标在浮标与对抗器材的延长线上,大小为0;
2)待测目标由对抗器材向浮标方向运动时,两种信号的时延差由小变大,反之则由大变小;
3)在一定区域内,二者时延差小于脉冲宽度,则两种信号将叠加在一起成为一个脉冲;
4)当时延差大于发射信号的周期时,模拟回波信号将会在下个周期出现,形成复杂的干扰情况。
2.2 两种信号叠加关系
由于水声信道多途的存在,水声侦察信号与模拟回波信号的时延差,及信号发射周期决定了两种信号的叠加情况。假设发射周期固定,发射与接收同步(若不同步,信号相对位置不会改变,不会对结果产生影响),不考虑信号的脉冲宽度及信号之间的同相与反相叠加,则两种信号序列将会出现如图3所示的几种叠加情况:
图中,SB 为水声侦察信号的直达声,STB 为模拟回波信号的直达声,t_S 为水声侦察信号的时延扩展,t_T 为模拟回波的时延扩展,Δt 为两种信号直达声之间的时延差,T 为信号发射周期。
设分群时间为t_Q,分析图中各情况为:
1)当Δt <t_S+t_Q 时(图3(a)),此时同周期的侦察信号序列与模拟回波信号序列叠加在一起,形成一个脉冲群;
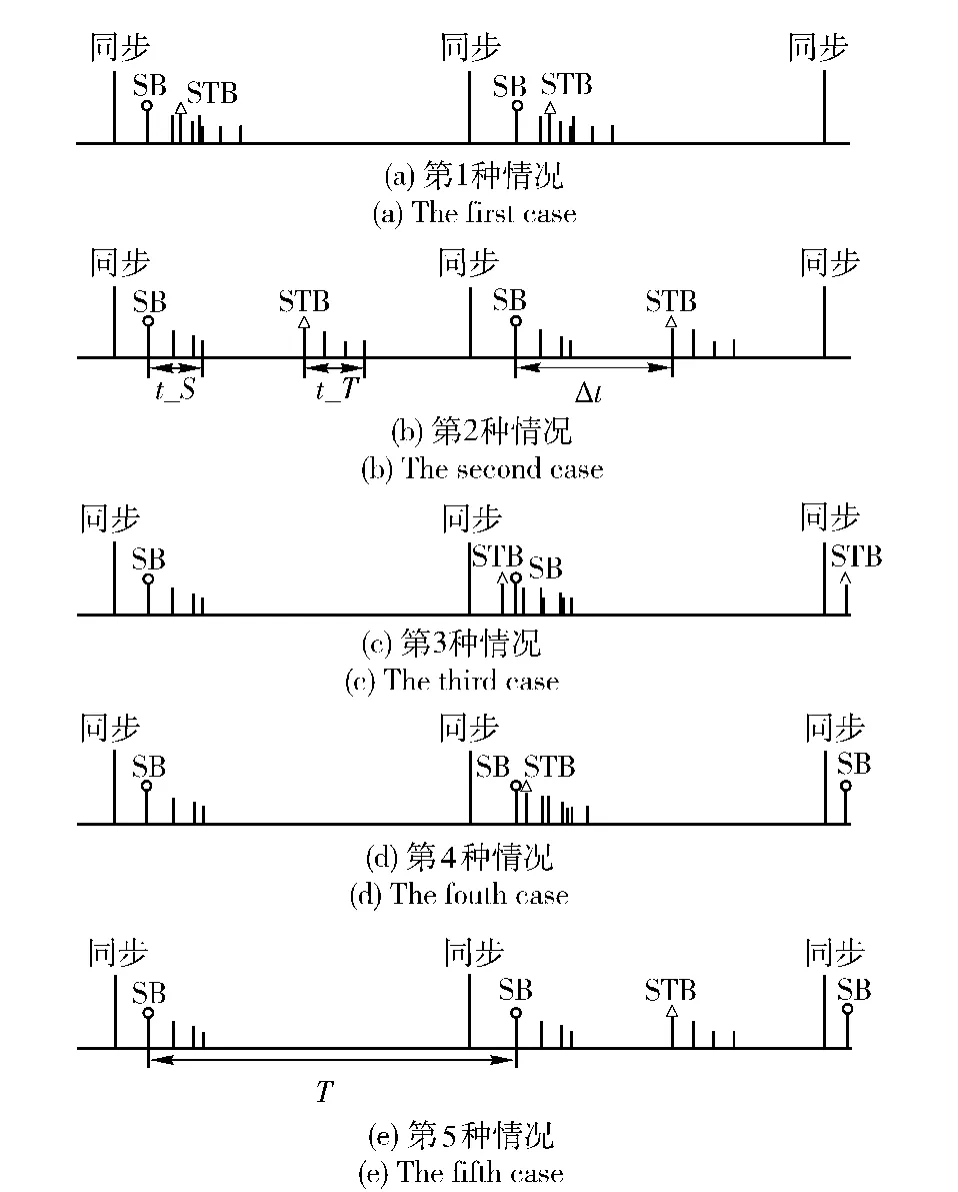
图3 脉冲结构Fig.3 Pulse structure
2)当t_S + t_Q <Δt <T- t_T- t_Q 时(图3(b)),同周期的侦察信号与模拟回波信号在同一期内,并且能明显分开成两个群;
3)当T-t_T-t_Q <Δt <T 时(图3(c)),本周期的模拟回波出现在下个周期,与下个周期的侦察信号叠加在一起,模拟回波在前;
4)当T <Δt <T+t_S+t_Q 时(图3(d)),本周期的模拟回波出现在下个周期,侦察信号在前,在第二个周期观测与第一种情况相似;
5)当T+t_S +t_Q <Δt <T +T-t_T-t_Q 时(图3(e)),本周期的模拟回波信号出现在下个周期,侦察信号在前,形成两个脉冲群,在下个周期观测与第二种情况相似。
当模拟回波信号与水声侦察信号的时延差再增大时,模拟回波信号将再向后移,则会与第三种情况相似,依次类推,重复上述几种情形,只是所跨周期数增加。
对以上分析进行仿真,条件:声速C =1 500 m/s;t_S=100 ms;t_T =100 ms;t_Q =100 ms;T =1 s;浮标位置(-500,0)m;对抗器材位置(500,0)m,待测目标在平面内变化,对应其每个位置计算两种信号时延差,并根据上述5 种情况划分平面区域,仿真结果见图4.

图4 区域内不同脉冲结构分布Fig.4 Regional distribution of different pulse structure
图中,左面的小圆为浮标,右面的五角星为对抗器材,从右往左的五个区域分别代表上述的1~5 种情况。这几种情况的出现与浮标和对抗器材的距离有关,距离越大,越容易出现更多情况。对于传统方法,若对抗器材与浮标相距较近,即仅为情况1 时,开窗长度大于时延差的最大值,模拟回波信号被卡掉,不再干扰定位解算;但对情况2、5,水声侦察信号与模拟回波将被分为两个不同的群,开窗后得到两种信号的两个直达声,难以取舍;对于情况3 分群开窗后,待测目标侦察信号的直达声被卡掉,只剩模拟回波信号,所以利用传统方法这三个区域均得不到准确的定位结果。
3 基于时延匹配及信号多普勒的侦察信号辨识方法
3.1 忽略信道多途影响
当忽略信道多途影响时,浮标接收到的仅为水声侦察信号与模拟回波信号的直达声,为了选出侦察信号,要利用多个浮标检测到的时延值,以图5为例进行说明。
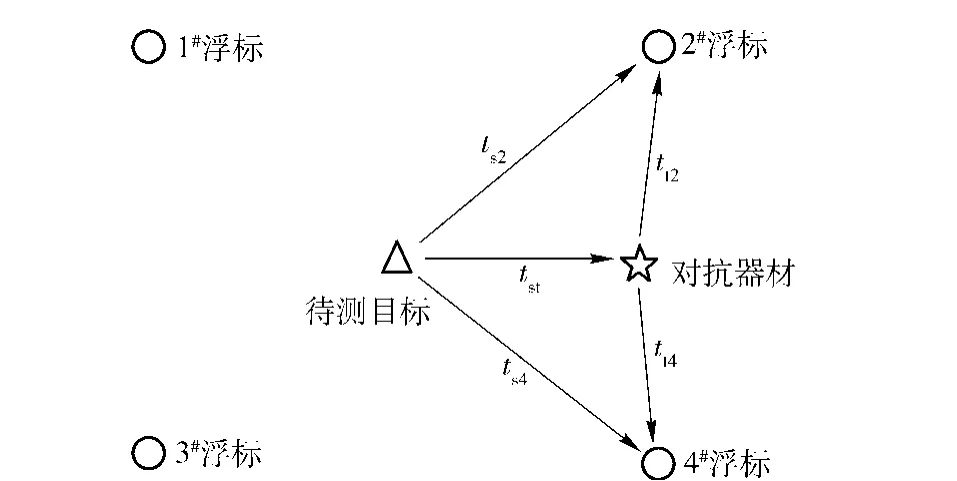
图5 时延分析图Fig.5 Time-delay analysis diagram
设侦察信号到达2#、4#浮标的时延分别为ts2、ts4,到达对抗器材的时延为tst,模拟回波到达浮标2、4 的时延分别为tt2、tt4,侦察信号经过对抗器材再到浮标2、4的时延分别为tst2、tst4,则有下式成立:

式(1)减式(2)得:

由于浮标与对抗器材的位置均确切已知,则tt2、tt4可以求得,那么由式(3)可以得到两个浮标模拟回波的时延差。当2#、4#浮标接收信号满足上述关系时,则可将这两个信号判为对抗器材模拟回波信号。经过仿真验证,上述方法能够可靠地选出模拟回波信号。
3.2 考虑信道多途
当考虑信道多途影响时,浮标接收到的信号除了包括水声侦察信号与模拟回波信号的直达声外,还包括它们各自的多途信号。由于海深相对于目标与浮标距离非常小,可认为直达声信号与其多途序列的多普勒近似相同,所以根据多普勒可以将检测到信号分成两个不同的群。利用时延匹配找到模拟回波信号的直达声后,与其多普勒接近相同的脉冲则为其多途,予以剔除不参与解算,而剩下的脉冲即为侦察信号及其多途序列,利用分群开窗的方法找到直达声即可。
在计算时需选取一个参考浮标,将其它浮标的时延与该浮标的各个时延值作差。因为要互相验证,参考浮标的选择主要考虑与对抗器材的距离,距离越远,模拟回波信号越容易与水声侦察信号分开,也可以轮换各个浮标作为参考。
3.3 处理步骤
根据理论分析,信号处理的流程见图6.

图6 处理流程图Fig.6 Process flow diagram
4 测试结果
在待测目标运动条件下进行仿真,仿真条件:4个浮标位置及对抗器材位置如表1所示;待测目标做直线运动,起点:(- 400,- 900,40)m,终点(350,700,50)m;目标运动速度:20 m/s;声速C =1 500 m/s;水声侦察信号发射周期为1 s.
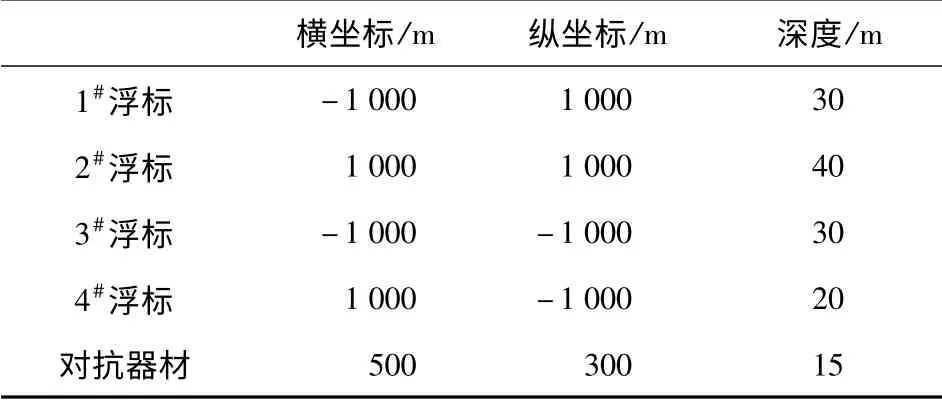
表1 浮标、对抗器材及待测目标位置Tab.1 Bouy,countermeasure equipment and the target location
采用传统方法选取接收信号的首脉冲,利用其时延进行解算,结果见图7.

图7 传统方法动点解算结果Fig.7 Calculation result of traditional methods
图中五角星为对抗器材位置,直线为目标真实轨迹,实心圆点为解算结果,利用传统方法,第一周期利用首脉冲可以得到正确结果,但是其它周期由于对抗器材模拟回波的存在,得不到正确结果。
利用时延匹配找到模拟回波信号直达声后,利用多普勒确定该信号的多途序列,剩下的脉冲再利用分群开窗的办法找到直达声,并进行定位解算,结果如图8所示,所得目标位置与真值重合,仿真结果说明该方法可以提高在水声对抗条件下的定位准确性。
5 结论
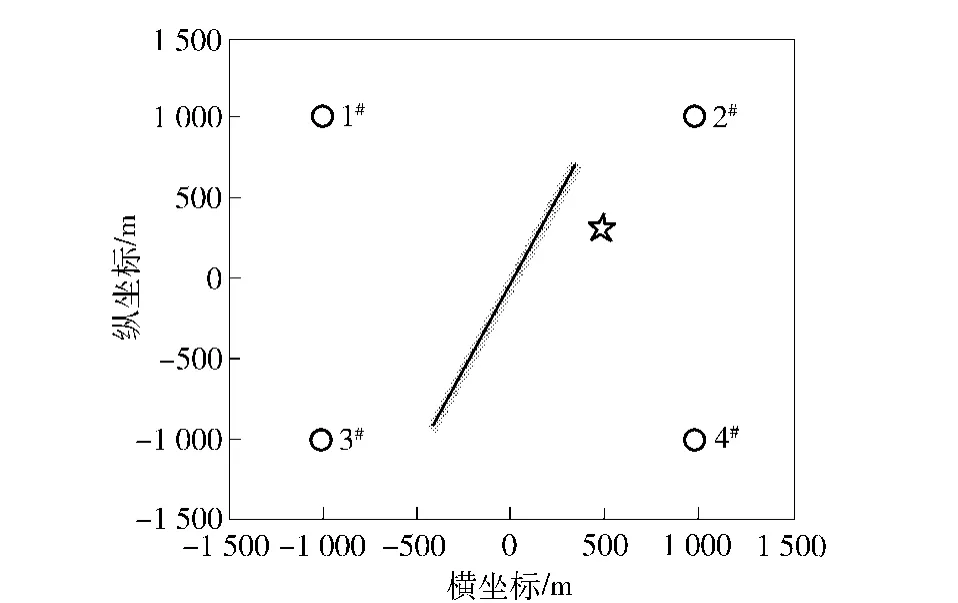
图8 新方法动点解算结果Fig.8 The calculation results of new method
在水声对抗条件下,从受模拟回波信号干扰的脉冲序列中正确选取侦察信号的直达声是浮标基定位系统实现正确定位的关键所在。本文提出了一种基于时延匹配及信号多普勒的侦察信号辨识方法,该方法利用时延匹配技术可找到模拟回波信号的直达声,并利用多普勒信息确定其回波信号的多途序列,从而准确提取待测目标的侦察信号,再结合传统分群开窗的办法实现侦察信号直达声的准确辨识,从而保证了系统对目标进行正确定位。仿真结果验证了该方法的有效性和可行性,具有一定的工程应用价值。
References)
[1] 王逸林.水下目标跟踪系统声学信号处理[D].哈尔滨:哈尔滨工程大学,2002.WANG Yi-lin.Acoustic signal processing of underwater targets tracking system[D].Harbin:Harbin Engineering University,2002.(in Chinese)
[2] 付进.长基线定位信号处理若干关键技术研究[D].哈尔滨:哈尔滨工程大学,2007.FU Jin.Research on several key techniques of the signal processing for long baseline location[D].Harbin:Harbin Engineering University,2007.(in Chinese)
[3] 耿培涛.水下高速目标轨迹测量系统信号处理软件设计[D].哈尔滨:哈尔滨工程大学,2008.GENG Pei-tao.The signal processing software design of underwater high-speed target's trace measuring system[D].Harbin:Harbin Engineering University,2008.(in Chinese)
[4] 李超.浮标主动定位系统信道匹配策略研究与实现[D].哈尔滨:哈尔滨工程大学,2009.LI Chao.Active positioning system channel matching strategy research and realization[D].Harbin:Harbin Engineering University,2009.(in Chinese)
[5] 王琳.水声对抗器材建模及目标特征参数提取方法研究[D].西安:西北工业大学,2002.WANG Lin.Study on the modeling of underwater acoustic countermeasure equipments and the methods of target feature extraction[D].Xi'an:Northwestern Polytechnical University,2002.(in Chinese)
[6] Routh C C.Sonar target simulator:United States Patent D357700[P].1980-08-26.
[7] Preikschat F K.Target simulation system:United States Patent 4521780[P].1985-06-04.
