基于控制的自由摆激光追踪系统
2012-02-21夏晨林张均峰
陈 杰,夏晨林,张均峰
(苏州大学 机电工程学院,江苏 苏州 215021)
反馈是生命的核心特征。反馈过程控制着我们如何成长、如何应对压力和挑战,并调节着体温、血压以及胆固醇水平等身体参数。反馈机制在各种层次上都起着作用,从细胞中蛋白质的相互作用,到复杂生态系统中生物体之间的相互作用,都有其贡献[1]。本文研究的自由摆激光控制系统正是现代检测与控制技术[2]应用的典型案例。MCS-51兼容单片机作为典型早期开发产品,以其优越的性能、成熟的技术以及高可靠性和性价比,迅速占领了工业测控和智能仪器仪表应用的主要市场,成为国内单片机应用领域的主流。步进电机因其较高的精度和可靠性广泛应用于数字控制系统中,如数模转换装置、数控机床、计算机外围设备、自动记录仪、钟表等,另外,其在工业自动化生产线、印刷设备等中亦有应用。如采用位置检测和速度反馈,可以方便地实现闭环控制,而高性能细分驱动器能够提高步进电机控制的精度,也使得控制方法简单灵活,便于调试。本文以下内容将详细介绍自由摆激光追踪系统的原理和设计方案,并对其应用进行了展望。
1 自由摆激光追踪系统的工作原理
1.1 方案原理
自由摆激光追踪系统主要由控制模块、角度检测模块、电机驱动模块、辅助显示模块、自由摆机械装置五个模块组成。在摆杆摆动过程中,由角度检测模块检测其摆动角度,并将旋转位移转换为一连串数字脉冲信号,传送给控制模块。控制模块根据事先编写的程序,对数字脉冲信号进行处理,并向电机驱动模块输出反馈信号,控制步进电机转动对应的角度,使激光光斑始终照射在中心线上。其原理框图如图1所示,自由摆摆架结构如图2所示。
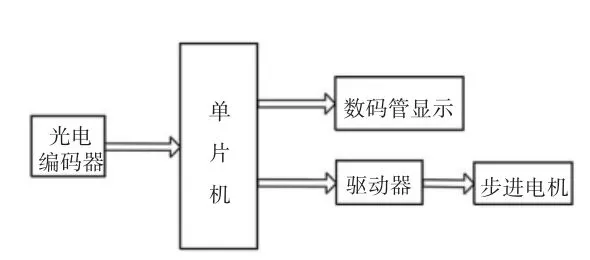
图1 系统总体结构框图
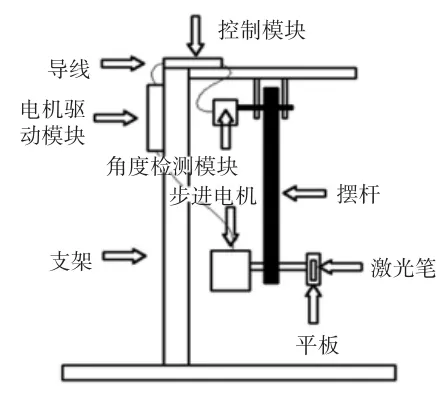
图2 自由摆摆架结构
1.2 自由摆自动控制系统数学模型
设摆杆初始位置位于竖直方向,平板垂直于摆杆,摆杆重心距离转动中心L,转动中心与靶平面的水平距离为S。
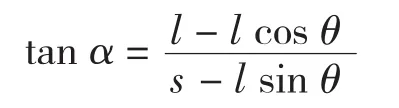
(1)摆杆逆时针转动
由图3可知,当摆杆转动θ时,若要激光笔精确打靶,必须使得平板转动φ=θ+α,其中α由下式给出
为了方便单片机进行处理,我们将列出θ在0~60度之间变化时,对应的φ的值,如表1所列。

表1 摆杆右摆,电机转动角φ与摆角θ的关系
(2)摆杆逆时针转动
由图4可知,当摆杆转动θ时,若要使激光笔精确打靶,必须使得平板转动φ=θ-α,其中α由下式给出
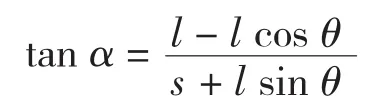
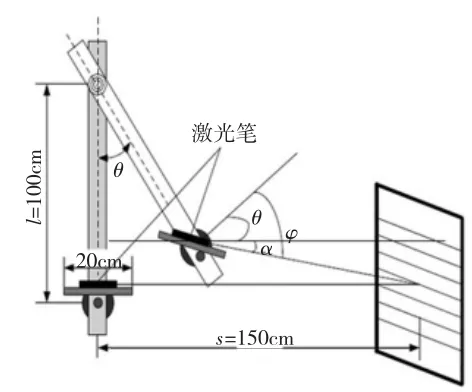
图3 摆杆顺时针转动
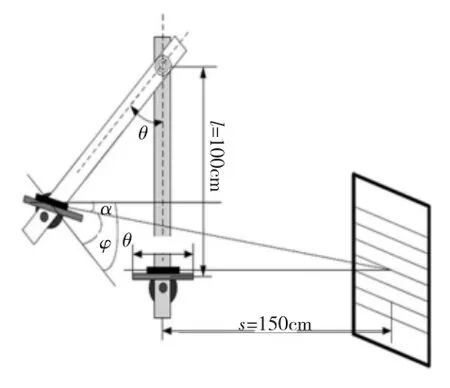
图4 摆杆逆时针转动
为了方便单片机进行处理,我们将列出θ在0~60度之间变化时,对应的φ的值,如表2所列。

表2 摆杆左摆,电机转动角φ与摆角θ的关系
在摆杆摆动过程中,根据前面分析的平板转动控制原理及旋转角度之间关系,根据摆杆摆角的变化,控制步进电机的旋转,从而使激光笔光斑始终瞄准照射在靶纸的中心线上。通过实验分析,该装置能够达到预期的精度要求。
2 自由摆激光追踪系统的方案设计
2.1 系统各个模块的方案选择
(1)控制器模块
控制器模块采用MCS-51兼容高性能微处理器SST89E516RD[4]为主控制芯片。MCS-51兼容单片机处理速度可完全满足系统对实时性的要求,与检测模块和驱动模块接口方便,可靠性、性价比高。编程环境为 Keil μVison(C语言)[5],可以提高可移植性、结构性及可读性,且方便维护和修改。
(2)角度检测模块
角度检测模块采用增量式光电编码器,型号为E50S8-200-3-1-24。主要由光源、码盘、检测光栅、光电检测器件和转换电路组成。码盘上刻有节距相等的辐射状透光缝隙,相邻两个透光缝隙之间代表一个增量周期;检测光栅上刻有A、B两组与码盘相对应的透光缝隙,用以通过或阻挡光源和光电检测器件之间的光线。它们的节距和码盘上的节距相等,并且两组透光缝隙错开1/4节距,使得光电检测器件输出的信号在A、B两相互差90°电度角,从而可方便地判断出旋转方向。当码盘随着被测转轴转动时,检测光栅不动,光线透过码盘和检测光栅上的透过缝隙照射到光电检测器件上,光电检测器件就输出两组相位相差90°电度角的近似于正弦波的电信号,电信号经过转换电路的信号处理,可以得到被测轴的转角或速度信息。
(3)电机模块
电机模块采用上海四宏电机有限公司生产的二相四线制步进电机,型号为42BYGH102(主要参数为:步距角1.8°,工作电压12 V,额定电流0.5 A,静转矩0.4 N.m)。
(4)电机驱动模块
电机驱动模块采用上海四宏电机有限公司生产的SH-215B高性能细分驱动器。
(5)显示模块
显示模块采用CD4094驱动七段式共阴极数码管[3]。
系统各个模块的方案选择,如表3所列。

表3 方案总括
2.2 电路与软件程序设计
以上分别讨论了各个子模块的选择方案,确定结果如表3所示。下面将以上各模块进行电路整合,并为其设计软件程序。在控制过程中,摆杆的位置信息通过安装在转轴上的增量式光电编码器测出,两路输出信号进入SST89E516RD单片机,OUTA接单片机外部中断口P3.2,OUTB接单片机I/O端口P1.2,用控制程序进行识别,即可得到摆杆的角位移变化信息。单片机对此进行分析处理,依照指定功能通过一定算法控制步进电机转动,达到控制平板运动,激光定位等功能要求。在设计电路时,步进机采用了专用驱动器SH-215B,其直接与单片机和步进电机相连。总体电路设计框图见图5。
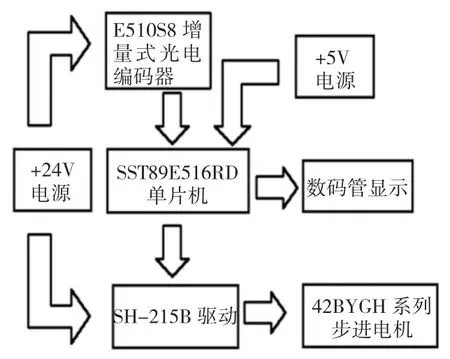
图5 总体电路框图
软件部分主要实现摆动过程中平板的旋转与平衡的控制。本系统主要通过SST89E516RD单片机接收由增量式光电编码器采集的摆杆转动角度(中断处理),内置平板状态控制的算法,查表得到激光笔应旋转的角度,发送相应角度旋转指令给高性能细分驱动器SH-215B,驱动步进电机实现平板的旋转,确保在摆杆自由摆动过程中尽量使激光笔光斑始终瞄准照射在靶纸的中心线上。另外,实时地将摆角的大小显示在数码管上。程序流程图如图6所示。

图6 程序流程图
电路及软件程序设计部分,电机驱动模块是重要的一环,下面详细介绍这一部分。SH-215B驱动器+5 V引脚接5 V控制电源,ENA引脚悬空,CP、DIR端分别接入单片机 P1.0、P1.1端口,VCC、GND接+24 V直流电源,A+、A-、B+、B-端口接到步进电机相应绕线,具体为:A+接红线,A-接绿线,B+接黄线,B-接蓝线,如图7所示。
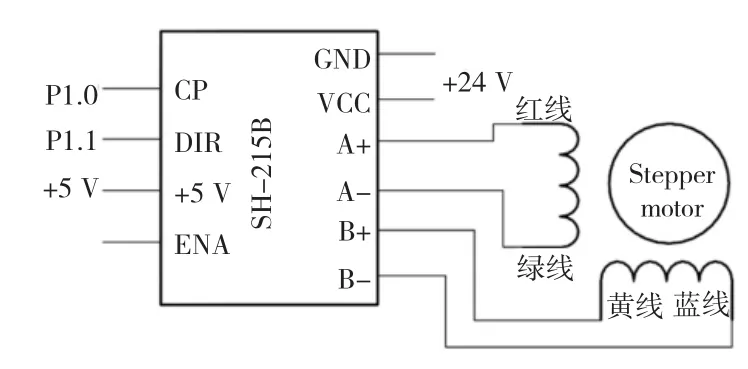
图7 电机驱动电路设计
电机驱动子程序:
sbit P10=P1^0; //电机CP控制端
sbit P11=P1^1; //电机运转方向控制
void maichong(uint i)//步进电机控制输入脉冲序列
{
uint j;
for(j=0;j {P10=1; delay(); P10=0; delay();} } if(count>flag) //摆杆向右旋转 { P11=1; if(count>0)maichong(tab1[count-1]); else if(count<0)maichong(tab2[-count-1]); else maichong(tab2[0]); flag++; } if(count { P11=0; if(count>0)maichong(tab1[count-1]); else if(count<0)maichong(tab2[-count-1]); else maichong(tab1[0]); flag--;} 本文论述了一种较为简单的自动控制系统—自由摆激光追踪系统,其运用了反馈控制的基本理论和方法。反馈控制的基本环节包括测量、计算和驱动三个部分,在本系统中,测量装置为增量式光电编码器,计算部分为51单片机,驱动环节为两相四线制步进电机。由于各部件存在的原始误差和时滞效应,系统的精度受到一定的影响。在今后的研究工作中,可以将通过算法优化的方法来减小系统的误差并且提高系统的动态稳定性,从而拓宽该控制系统在工业、航空航天、国防等重要领域的应用,如在特殊环境下的激光钻孔、切割,激光制导以及激光定位等。 [1]M.B.Hoagland,B.Dodson.The Way Life Works[M].New York:Three Rivers Press,1998. [2]金 伟,齐世清,王建国.现代检测技术[M].北京:北京邮电大学出版社,2006. [3]康华光,陈大钦.电子技术基础[M].第五版.北京:高等教育出版社,2006. [4]邹丽新,翁桂荣.单片微型计算机原理[M].苏州:苏州大学出版社,2009. [5]陈 涛.单片机应用及C51程序设计[M].第二版.北京:机械工业出版社,2011.3 结束语