ADXL203型双轴加速计在机器人足部感知系统中的应用
2012-02-06申海义吴宝元吴仲城
申海义 ,吴宝元 ,任 阳 ,申 飞 ,吴仲城
(1.中国科学技术大学 自动化系,安徽 合肥 230026;2.中国科学院合肥智能机械研究所,安徽 合肥 230031;3.中国科学院强磁场科学中心,安徽 合肥 230031)
仿人机器人是近年来发展起来的综合学科。运动功能是仿人机器人最基本的功能,其中双足稳定可靠行走是进行作业的基本保障,也是仿人机器人实用的前提条件。目前仿人机器人的双足行走步态规划主要是基于零力矩点ZMP(Zero Moment Point)控制理论。实际上,人行走过程中,足底的神经末梢可实现地面接触位置、地形、地面反作用力大小和方向等信息的实时感知,并及时反馈到中枢神经系统,使之能及时调整身体姿势。仿人机器人要适应人类生活、工作环境,基于足部信息的仿人机器人稳定行走控制就显得尤为重要,特别是在不平整路面上步行、转弯、上下楼梯时,其足部姿态信息就显得更为重要。而足部姿态信息中的脚面倾角信息是仿人机器人稳定控制的重要依据[1]。它可以让仿人机器人感知脚面倾斜情况,在稳定着地时,脚面倾角还可以反映地面倾斜状态,是仿人机器人稳定控制的一个关键参数。
1 系统介绍
本文研究基于本实验室研制的集成化仿人机器人足部感知系统[2-3],以使仿人机器人能够感知复杂地面环境信息,目标是实现机器人行走过程中有效稳定支撑区域、ZMP轨迹、地形、地面反作用力等信息实时感知。
仿人机器人足部感知系统是由六维力传感器、ADXL203双轴加速度传感器、柔性力传感器阵列、信号处理单元、电源单元、减震层和基板构成。其中,ADXL203双轴加速计即可测量动态加速度,又可以用来实现诸如重力加速度的静态测量,此时可以替代倾角传感器进行倾斜测量,得到静态脚面倾角信息。
信号处理板的主要功能是采集倾角传感器(A六维力传感器、柔性力传感器阵列的信号,计算有效稳定支撑区域、ZMP轨迹、地形、地面反作用力等信息,并将上述信息输出给上位机。
2 利用ADXL203双轴加速计测量倾角的原理
ADXL203是美国ADI公司推出的一种高精度、低功耗及单一的iMEMS型IC芯片双轴加速计。其原理为通过测量重力加速度g在敏感轴上的分量,通过计算将其转化成倾角,得到传感器相对于水平面的倾斜和俯仰角度[4-5]。

以重力矢量作为基准,将它的X轴和Y轴水平放置定义为0°。此时加速度传感器ADXL203处于水平位置,参考面为水平面,Z轴为重力势方向,当绕X轴或Y轴转动时,有:式中:AX、AY为加速度传感器X敏感轴和Y敏感轴的输出,即g在X敏感轴和Y敏感轴上的分量;g为重力加速度值;pitch、roll为加速度传感器平面与坐标系水平面X轴和Y轴的倾斜角度[6]。
将ADXL203加速度传感器的XOUT和YOUT输出的模拟电压信号 VX、VY换算成对应的敏感轴上输出 AX、AY为:
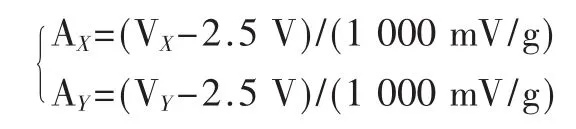
将 AX、AY代入(1)式即可得到 X、Y轴的倾斜角度pitch 和 roll。
3 倾角信息获取
3.1 测量电路硬件设计
考虑到系统中数据处理量很大,采用TI公司的32 bit的TMS320F2811作为处理器。TMS320F2811具有片内12 bit A/D转换器,快速转换时间为 80 ns;最高传输速率为1 Mb/s的增强型 CAN总线(eCAN),可以达到机器人足部感知系统实时数据采集、处理和传输的要求。
ADXL203双轴加速度计XOUT和YOUT输出为模拟信号,直接由TMS3202811的片内A/D进行采样,ADXL203提供了电源接口、自检电压输出接口、XOUT和YOUT电压输出和公共地。其中电源的输入范围为3 V~6 V,DSP(TMS320F2811)的 VDDA1输出 3.3 V 经过电感 L2、0.1 μF和10 μF电容滤除谐波,去除耦合为传感器供电。自检模式不使用,自检电压接口通过电阻接地。XOUT和YOUT经过低通滤波,实现对信号的去锯齿和噪声削弱,XOUT和 YOUT选取的滤波电容为 0.1 μF,此时带宽为 50 Hz,RMS噪声为1 mg。TMS3202811通过ADCINA0和ADCINA1与ADXL203双轴加速计相连,连接图如图1所示。

图1 ADXL203与TMS3202811连接方式
3.2 倾角测量软件设计
对传感器的输出信息进行采集是本系统的最基本功能,系统的软件设计主要完成对加速度传感器信号的采集、处理和传输。
仿人机器人足部感知系统需要同时采集和处理六维力传感器、倾角传感器和柔性力传感器阵列的数据。为了提高系统的效率,采用中断的方式实现。
定时器的定时周期配置为10 ms,每10 ms进行一次数据采集A/D转换,当转换完成后,进行数据处理,不仅包括A/D转换结果的寄存器移位操作,本系统还使用了过采样技术,使A/D的转换精度更高,使A/D转换器由原来的12位提高到13位,分辨率更高。数据处理结束,使标志位置位,由主程序进行数据的发送,通过增强型CAN(eCAN)总线发送给上位机,上位机界面显示倾角信息。
系统的软件流程如图2所示。
4 实验结果
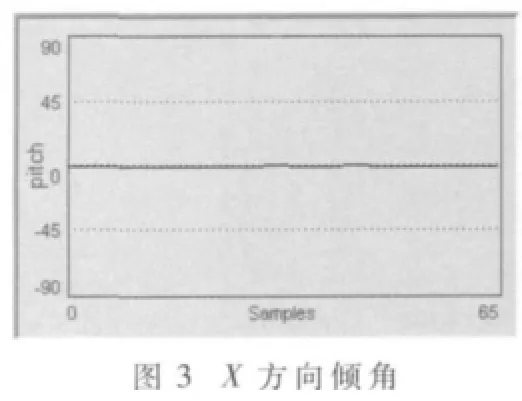
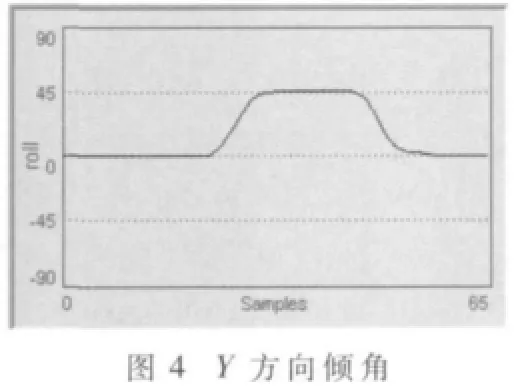
为了验证ADXL203型双轴加速度传感器在机器人足部感知系统中的可行性,利用Visual C++开发了上位机的界面用于显示倾角的变化,实验数据由TMS3202811通过CAN接口发送。此外,由CAN—USB连接上位机,上位机将数据进一步处理,转化为机器人足部的倾角值。实验中,将机器人的足部脚板X、Y方向先置于0°,上位机显示界面打开,再模仿机器人起步将足部脚板置于障碍物上,此时,X方向仍为0°,Y方向倾斜约为45°,然后再模仿机器人足部落地将脚板重新置于0°,上位机界面可以实时显示机器人足部的倾角信息。显示界面如图3和图4所示。图3中,Y轴表示X轴方向倾角(pitch)大小,图4中Y轴表示Y轴方向倾角(roll)大小,X轴均表示正在显示当前的65个采样点的倾角值。由图可知,ADXL203双轴加速计可以实现对仿人机器人足部倾角信息的准确监测。
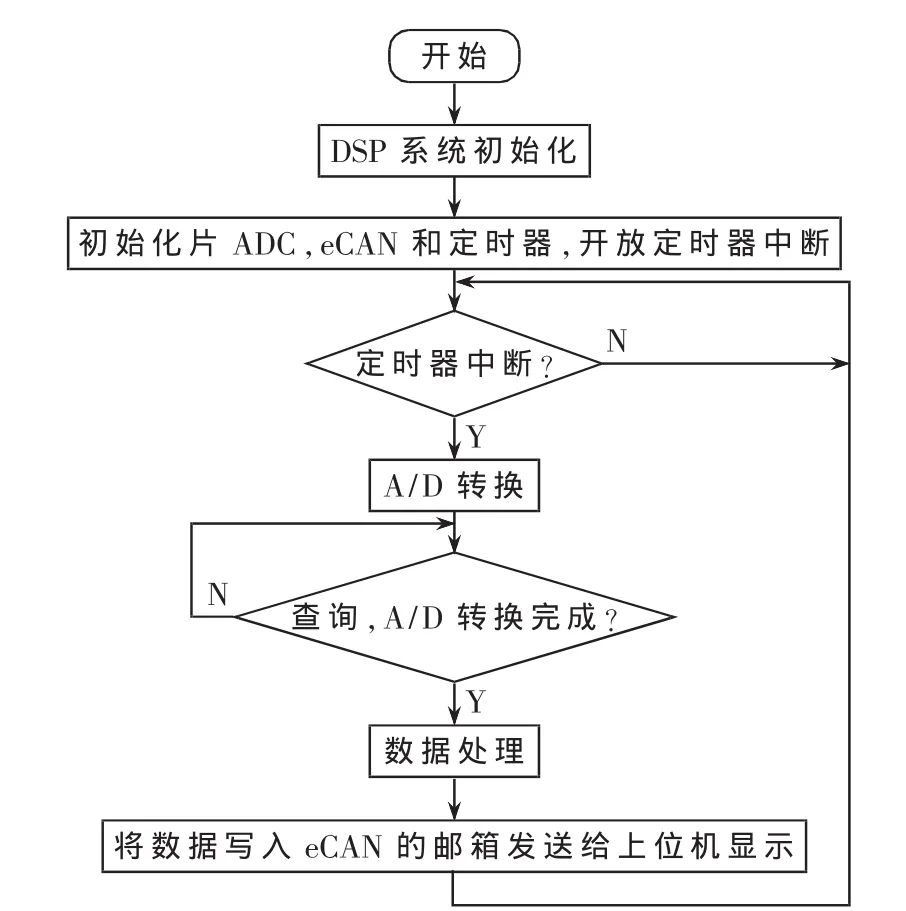
图2 倾角传感器数据采集和处理流程图
ADXL203是晶体硅固体结构的加速计,它受温度的影响极小,保证了系统的稳定性。以TMS3202811和ADXL203为核心来测量机器人足部感知系统的倾角信息,测量精度高、功耗低、成本低,可同时实现双轴输出,能够实现对仿人机器人的足部静态倾角信息实时监测,对于仿人机器人在复杂环境中的稳定控制,实现稳定行走提供了重要保证。但ADXL203双轴加速计只能够实现对静态脚面倾斜信息的监测,下一步准备引入角速度传感器,与ADXL203配合实现对脚面动态倾角信息的监测,将会为仿人机器人稳定行走提供更全面的姿态信息。
[1]李建玺,黄强,张伟民,等.仿人机器人足部姿态实时感知系统[J].微计算机息,2009,25(8):168-170.
[2]Wu Baoyuan,Luo Jianfei.Optimum design method of multiaxis force sensor integrated in humanoid robot foot system[J].Elsevier,2011,44(9):1651-1660.
[3]钱昌忠,吴仲城.姿态传感器在仿人机器人足部感知系统中的应用[J].仪表技术,2010(9):68-70.
[4]曾勇,杨涛,岳高铭.基于 MEMS为微加速度的振动测试仪[J].传感器与微系统,2007,26(6):75-77.
[5]彭涛,姚伯威.基于DSP的数字式MEMS加速度传感器ADXL203的设计与应用[J].微计算机信息,2006,22(10):308-309.
[6]赵命,邱锦波.基于重力加速度检测的矿用倾角传感器分析设计[J].煤矿机电,2008(1):62-64.